
[20個專案學會BBC micro:bit程式設計] 19-直流電機控制
--硬體連線
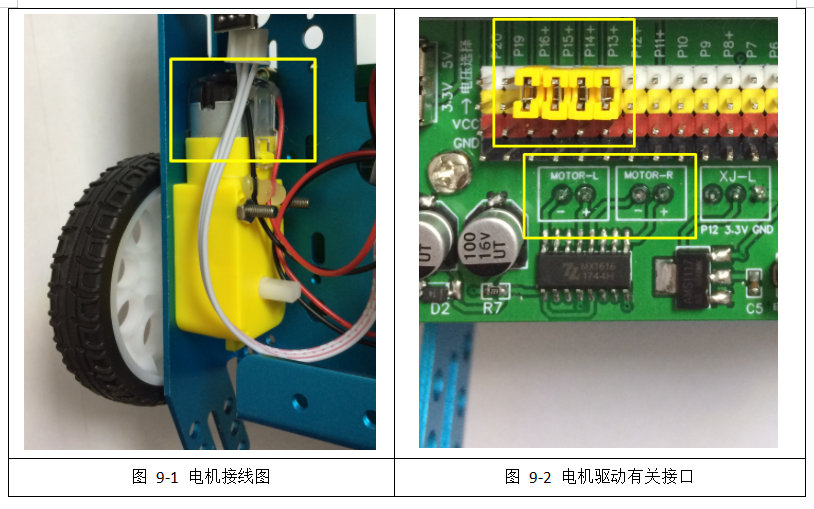
注:電機的兩根接線,紅色的貼近金屬底盤,黑色的遠離金屬底盤,燃點科技提供的電機都會按照這個標準統一焊接好,與big:bit上預留的插座完全匹配,組裝M-robot時只需要插上插頭就可以了,這樣也可以與我們提供的程式完全匹配。與直流電機控制相關的四個介面為P13、P14、P15、P16,記得要把這幾個的跳線帽連線上。
--實驗程式設計
注:在這裡我們使用函式來進行程式設計,因為直流電機驅動控制相對麻煩,這樣我們寫成函式以後就方便多了。直流電機驅動採用PWM控制,簡單理解起來就是不同的電壓對應不同的轉速。所以想要控制直流電機的速度,我們通過模擬寫入的方式來控制電壓就可以了。big:bit擴充套件板背面的電機控制對應表可以更好地幫助你理解如何控制電機。

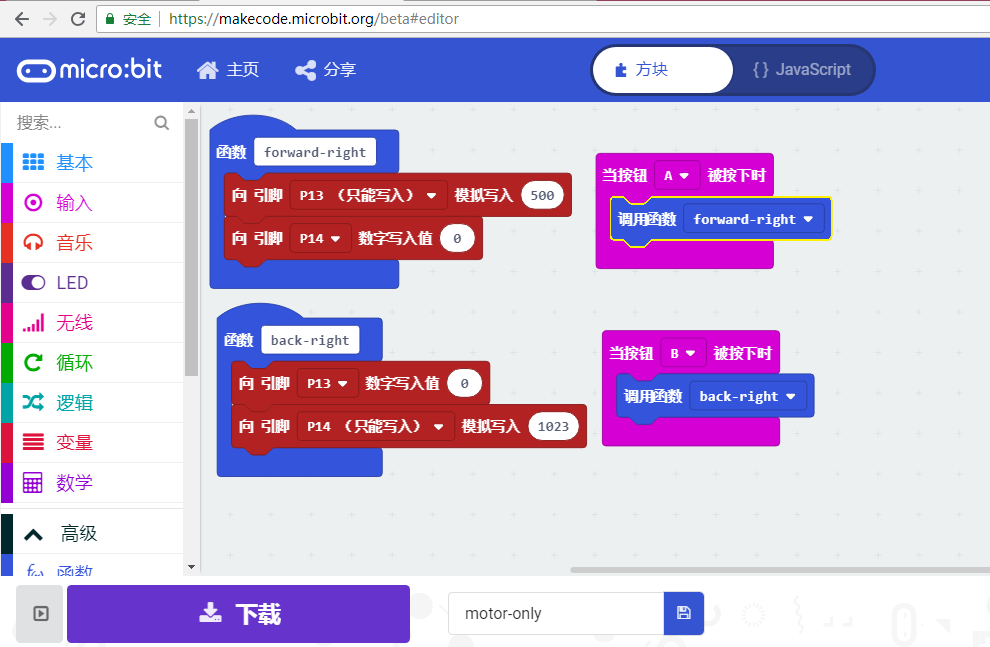
程式網址:https://makecode.microbit.org/_MKkXghC4TFcm
--實驗結果
按A鍵右輪子往前轉,但轉得較慢;按B鍵右輪子往後轉,但轉得較快。
注意事項:
1.驅動直流電機時一定要採用外部供電,不要用micro:bit進行供電,不然容易燒壞電路板。
2.直流電機的兩根線加正向電壓電機正轉,加反向電壓電機反轉;在承受範圍內,加高電壓電機轉得快,加低電壓電機轉得慢。
3.直流電機往往需要比較大的電流,所以一般擴充套件板都會設計上相應的電機驅動晶片,起的就是電流放大的作用。
拓展知識:
機器人上到底用什麼電機好?
我們都知道,要讓機器人動起來,需要要有個電機。無論是娛樂性雙足直立行走機器人,還是輪式機器人,都需要有電機才可能動起來。體型比較大的機器人需要的電機馬力比較多,體型小的需要的電機馬力較小。機器人的種類繁多,應用到的電機也各不相同。如工廠生產線上用到的機械手,因為對精度要求較高,就需要用到可以實現精密控制的伺服電機,這種電機配有專門的控制器,在控制學上我們稱它的控制方式為閉環控制(不瞭解的讀者可不必深究)。也有對精度要求沒那個高的機械手,它可能應用一個步進電機就可以了,步進電機是把一圈360度進行了細分,每給一個脈衝就轉一個固定的微小角度,通過這種方式也可以實現較精確地控制。還有比如我們在春節晚會上看到的跳舞機器人,它上面應用的是數字舵機,數字舵機可以理解為一個簡單的伺服電機,它裡面也有自己的控制,只需要外部給目標角度指令就可以了,但舵機一般只用在對扭距要求比較小的場合。你肯定又想到了模擬舵機,模擬舵機跟步進電機有點類似,不能實現精確地控制,輸入不同寬度的波形它就會轉動不同的角度。最後,要提到的就是直流電機,直流電機是最不能精確控制角度的,給它通電就轉,斷電就不轉(有可能還會滑行),而且通不同的電流,轉得快慢也不同,但因為它價格比較便宜,而且不容易損壞,所以適合初學者學習使用。
