
ros+科大迅飛語音包+圖靈機器人(一)sdk下載及測試
二、建立應用程式
- 我這裡建立的應用名稱為KF
三、下載SDK
- 只有建立好應用才能下載SDK
在ubuntu建立一個資料夾”SoftWare“,將下載的SDK解壓到該資料夾下
$ mkdir SoftWare
四、測試是否下載成功
- 先下載mplayer播放器
- $ sudo apt-get install mplayer
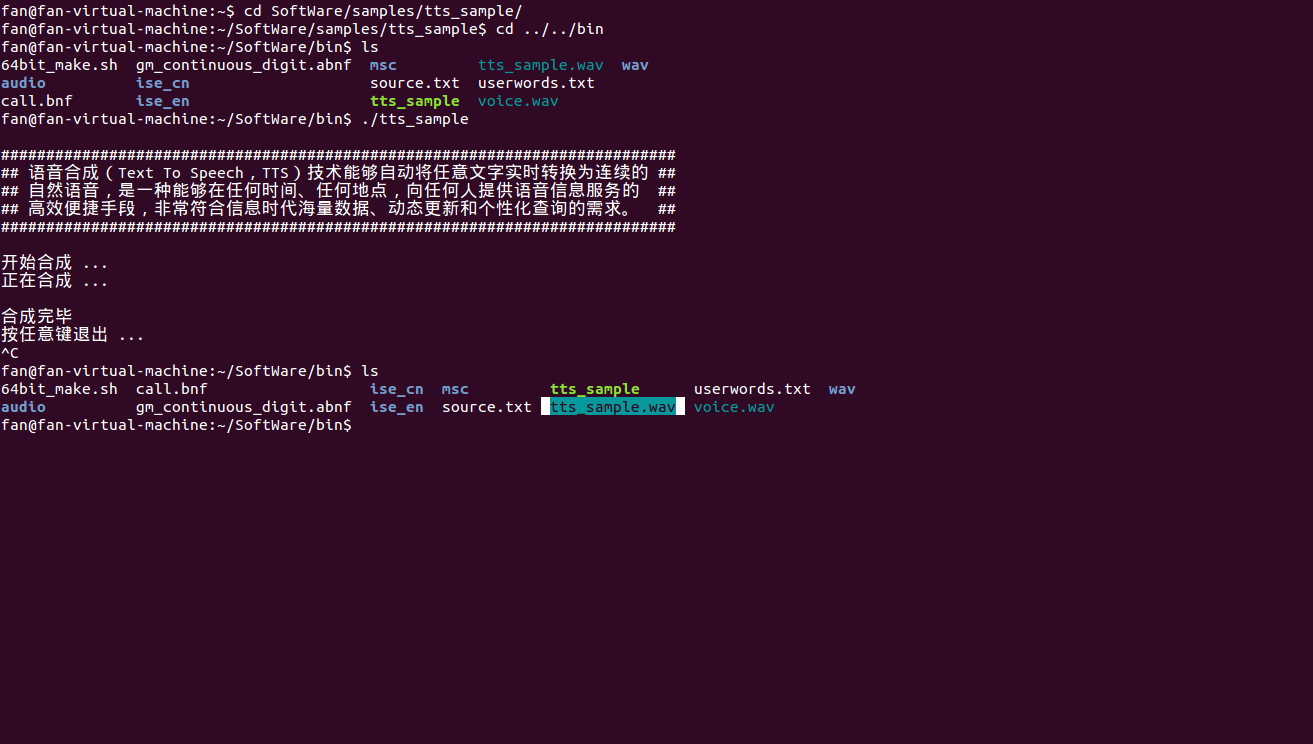
- 到tts_sample目錄下(在這裡,你的tts_sample的路徑可能跟我不同)
- $ cd SoftWare/samples/tts_sample/
- $ source 64bit_make.sh
- $ make
- 將“64bit_make.sh”這個資料夾拷貝到bin目錄下,我們後面需要使用到
- $ cp 64bit_make.sh ../../bin/
- 回到bin目錄下
- $ cd SoftWare/bin/
- $ ./tts_sampl
- 此時我們可以看到編譯完成,而且bin目錄下多了一個WAV檔案
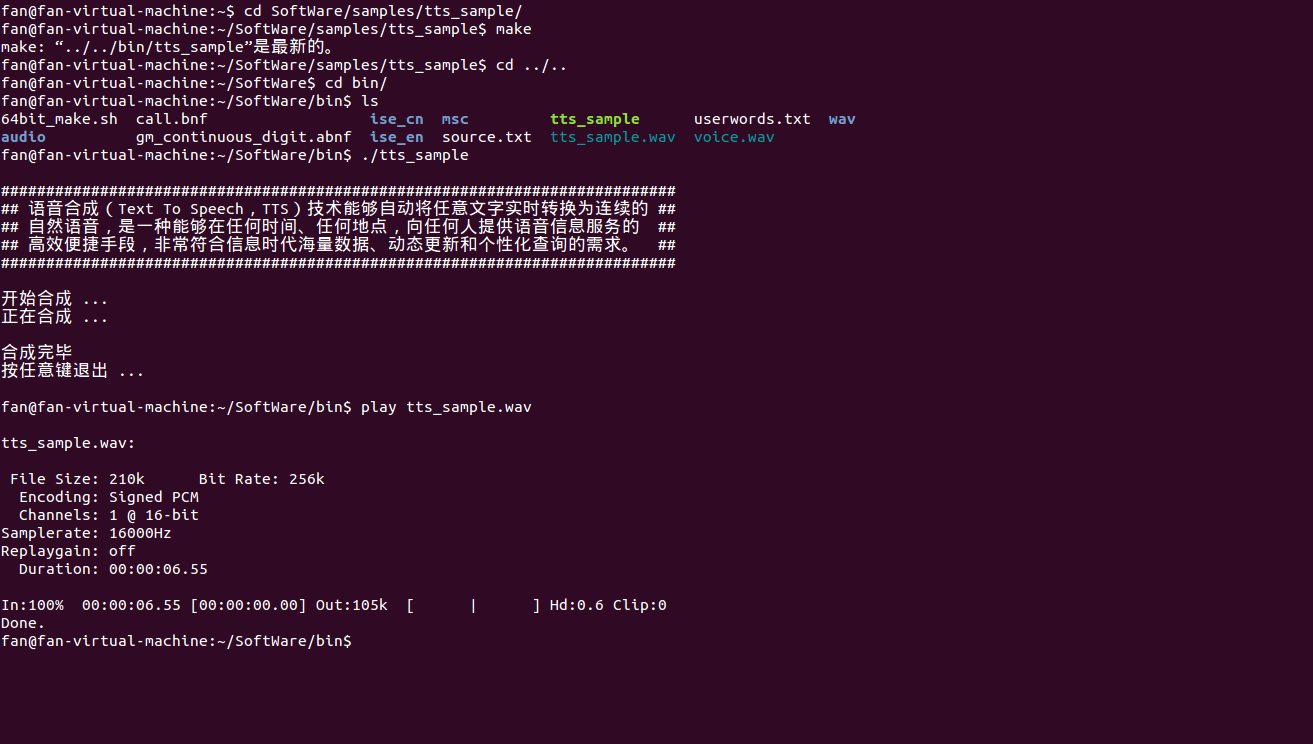
- $ play tts_sample.wav
- 此時,我們需要播m放WAV檔案的內容,在此之前需要下在SOX,安裝完後才能在可以用命令列來播放
- $ sudo apt install sox
- $ play tts_samples.wav
- 在此,就能聽到聲音了,但是關掉命令視窗後重新執行tts_samples會發現libmsc.so找不到,主要是因為沒有source,路徑找不到
- 但是為以後不用每次都要source所以我們需要進行一下步驟
- $ cd SoftWare/libs/x64
- $ sudo cp libmsc.so /usr/lib
- 這樣以後就不用每次都source了,當我們在bin目錄下再執行./tts_samples就不會出錯了
- 同時我們需要在tts_samples中修改Makefile檔案,在檔案中加入” $(DIR_BIN)/*.wav“使每次make clean都會刪除之前的WAV檔案
#common makefile header DIR_INC = ../../include DIR_BIN = ../../bin DIR_LIB = ../../libs TARGET = tts_sample BIN_TARGET = $(DIR_BIN)/$(TARGET) CROSS_COMPILE = CFLAGS = -g -Wall -I$(DIR_INC) LDFLAGS := -L$(DIR_LIB)/x64 LDFLAGS += -lmsc -lrt -ldl -lpthread -lstdc++ OBJECTS := $(patsubst %.c,%.o,$(wildcard *.c)) $(BIN_TARGET) : $(OBJECTS) $(CROSS_COMPILE)gcc $(CFLAGS) $^ -o[email protected] $(LDFLAGS) %.o : %.c $(CROSS_COMPILE)gcc -c $(CFLAGS) $< -o [email protected] clean: @rm -f *.o $(BIN_TARGET) $(DIR_BIN)/*.wav .PHONY:clean #common makefile foot- 現在再次執行就可以聽到聲音
該文章主要是對自己學習的一些總結,方便以後學習,也對學習該方面的人提供一些幫助,如有問題請指出。
同時該文章也借鑑了ros小課堂的一些內容。
相關推薦
ros+科大迅飛語音包+圖靈機器人(一)sdk下載及測試
二、建立應用程式我這裡建立的應用名稱為KF三、下載SDK只有建立好應用才能下載SDK在ubuntu建立一個資料夾”SoftWare“,將下載的SDK解壓到該資料夾下$ mkdir SoftWare四、測試是否下載成功先下載mplayer播放器$ sudo apt-get in
ros+科大迅飛語音包+圖靈機器人(二)在ros上使用科大迅飛
在工作空間catkin_ws下建立一個包$ cd catkin_ws/src/$ catkin_create_pkg voice_system std_msgs rospy roscpp把科大迅飛包裡的程式碼複製到你建立的包裡,並重命名為xf_tts.cpp$ cd Soft
ros+科大迅飛語音包+圖靈機器人(三)通過圖靈進行語義理解
在vioce_system 包中的src資料夾下建立一個tuling_nlu.cpp檔案以下是tuling_nlu.cpp的內容(注意,需要把程式碼中的key改為自己建立機器人的key,把 curl_easy_setopt(pCurl, CURLOPT_URL, "http://openapi.tuling1
ROS+科大訊飛語音=讓你的機器人能聽會說---(二)說話篇
(二)說話篇 基本環境配置 建立工作空間 $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace 首次編譯 $ cd ~/catkin_ws/
ROS+科大訊飛語音=讓你的機器人能聽會說---(一)環境搭建與準備
概述 ROS介紹 ROS是是用於機器人的一種次級作業系統。它提供類似作業系統所提供的功能,包含硬體抽象描述、底層驅動程式管理、共用功能的執行、程式間的訊息傳遞、程式發行包管理,它也提供一些
【從零單排之二】科大訊飛語音包Mscdemo的使用
前幾天寫的從零單排系列我發現了一個嚴重的錯誤,就是科大訊飛下載的Mscdemo是可以使用的,只不過是我沒設定好環境而已才有那麼多錯誤,特此更正一下。 具體遇到的錯誤即解決辦法如下。 1.註釋是亂碼。右鍵單擊src包,選擇properties,找到Text code enco
安卓實現智慧聊天機器人(結合百度語音和圖靈機器人)
package com.ysk.tldemo; //提問/回答 public class TalkBean { public TalkBean(String content, int image
2018科大訊飛AI營銷演算法大賽總結(冠軍)
作者介紹:王賀,武漢大學,計算機專業,研二 寫在前面 首先很幸運能夠拿到這次冠軍,有兩位大佬隊友是這次獲勝的關鍵,再次感謝鵬哥和阿水。 同時希望我的分享與總結能給大家帶來些許幫助,並且一起交流學習。 接下來將會呈現ppt內容和部分程式碼 賽題分析 探索
如何在微信公眾號呼叫圖靈機器人(智慧聊天)
最近在研究微信公眾號,有人問我可以找你的公眾號聊天嗎?我的第一反應是我很忙我要上班沒有時間,後面就度娘了一下,發現了這個神奇的圖靈機器人,可以替你跟使用者聊天!是否期待你的公眾號有一個萌萌噠機
使用OpenCL+OpenCV實現圖像旋轉(一)
posit 段落 大致 pro 什麽 string cpp base wechat [題外話]近期申請了一個微信公眾號:平凡程式人生。有興趣的朋友可以關註,那裏將會涉及更多更新OpenCL+OpenCV以及圖像處理方面的文章。 最近在學習《OPENCL異構計算》,其中有
【opencv入門之七】形態學圖像處理(一):膨脹、腐蝕
tar struct show 函數 使用 運算 腐蝕和膨脹 依賴 版本 參考網站: http://blog.csdn.net/poem_qianmo/article/details/23710721 1、形態學(morphology)概述 數學形態學(Mathem
圖像處理(一)
red hsi 轉換 三種 gray 參考 gpo 轉化 公式 圖像處理最主要有兩種模型:RGB模型和HSI模型 RGB模型表示Red、Green、Blue,由紅綠藍三種顏色表示一個像素點。灰度的轉化公式為 gray= 0.212671R+0.715160G+ 0.0721
Python+OpenCV圖像處理(一)——讀取顯示一張圖片
沒有 class 釋放資源 圖像 Coding 路徑 troy 如果 nco 配置好所有環境後,開始利用python+opencv進行圖像處理第一步。 讀取和顯示一張圖片: import cv2 as cv src=cv.imread(‘E:\imageload\
ROS:使用Qt Creator創建GUI程序(一)
編譯錯誤 repl 搜索 AC test ica all Go 5.2.1 開發環境: Ubuntu14.04 ROS indigo version Qt Creator 3.0.1 based on Qt 5.2.1 步驟如下:(按照下面命令一步步來,親測可行) (一)安
Python3與OpenCV3.3 圖像處理(一)--環境搭建與簡單DEMO
http opencv3 opencv col lan pytho href tar .net https://blog.csdn.net/qq_32811489/article/details/78636049 https://blog.csdn.net/gangzhu
python+opencv圖像處理(一)
strong dct變換 mage uid 操作系統 之間 mea numpy 包括 一、什麽是opencv? Open Source Computer Vision Library.OpenCV於1999年由Intel建立,如今由Willow Garage提供支持
概率圖模型學習(一)概述
本文內容根據Stanford 教授 Daphne Koller 的公開課 Probabilistic Graphical Model內容整理。 1.什麼是概率圖模型 概率圖模型即為解決某一類應用問題的一個框架。在理解這個概念之前,首先來看兩個例子: 1) 上面這張圖片
PAT 備考第一天——圖論演算法(一)
大綱: 必考考點: 1.圖的定義和相關術語 2.圖的儲存(鄰接矩陣和鄰接表) 3.圖的遍歷(DFS和BFD) 4.最短路徑演算法 5.拓撲排序 非重點考點: 1.關鍵路徑 2.最短路徑中的Bellman-Ford和SPFA 甲級考綱以外的考點: 最小生成樹演算法 一、圖的
Android配置build.gradle實現Version Code編譯release包時自動增長(一)
Android配置build.gradle實現Version Code編譯release包時自動增長(一) 經常的,開發者在上線釋出之前要打出很多測試包給測試團隊測試,每次打出的release包為了區分不同的版本號,需要手動的修改Android裡面的配置檔案build.gradle的vers
python:抓包利器fiddler常識(一)
1.工作原理 以web代理伺服器的形式進行工作的,使用的代理地址是:127.0.0.1,埠預設為8888,過程如下: web代理就是在客戶端和伺服器之間設定一道關卡,客戶端先將請求資料傳送出去後,代理伺服器會將資料包進行攔截,代理伺服器再冒充客戶端傳送資料到伺服