
PX4二次開發
軟體架構
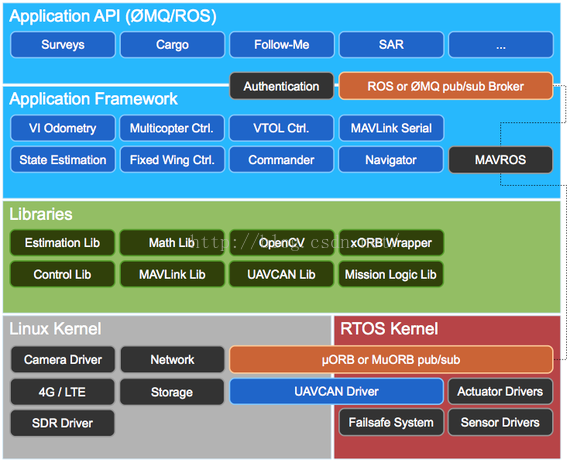
PX4 在廣播訊息網路內,按照一組節點(nodes )的形式進行組織,網路之間使用像如“姿態”和“位置”之類的語義通道來傳遞系統狀態。軟體的堆疊結構主要分為四層:
- 應用程式介面:提供給app開發人員,使開發人員可以使用ROS或者。這一介面設計儘可能簡潔和扁平,並儘量多的隱藏複雜性。
- 應用框架:這是一組核心預設應用程式(節點),執行核心的飛行控制。
- 函式庫:這一層包括針對機器核心操作的所有系統函式庫和功能
- 作業系統:最後一層,提供硬體驅動、網路通訊、UAVCAN和故障安全(failsafe)系統。
內部程序通訊(Inter ProcessCommunication,IPC)
PX4
IPC效能
釋出(Publication)到訂閱(subscription)之間的延遲:
- uORB: 23 us @ 168MHzSTM32F4
- ROS: TBD
- ROS2 / DDS: 185 us @ 1.6GHzIntelPentium 4 and 2GBRAM
running Windows XP (details)
- ZeroMQ: 170 us @ 1.6GHzIntelPentium 4 and 2GBRAM running Windows XP (details)
安全和保護模型
飛行核心與主要應用級處理過程隔離,以確保獨立於高層級系統狀態的機器核心操作,保持穩定。
PX4應用程式框架
PX4應用程式框架在所有平臺上程式碼相容,(比如 Pixhawk / NuttX,又比如, SnapDragon / Linux),獨立並將中間裝置作為傳輸層。

節點控制代碼(Node Handle)
節點控制代碼是每一個連線到中間裝置的釋出器(publisher)或者訂閱器(subscriber
- px4::NodeHandle n();
資料結構
對於所有相關的中間裝置實現,PX4根據儲存在“msg”中的定義檔案自動生成據結構。
釋出(publication)
通過使用節點控制代碼通告(advertise)訂閱主題( topic)來建立一個新的釋出(publication)。注意這個模板,是訂閱主題的資料結構。
- px4::Publisher<px4::px4_rc_channels>* rc_channels_pub = n.advertise<px4_rc_channels>()
從這個指向rc_channels_pub的控制代碼的指標,可以用於釋出資料
- px4_rc_channels rc_channels_msg;
- rc_channels_msg.data().timestamp_last_valid= px4::get_time_micros();
- _rc_channels_pub->publish(rc_channels_msg);
訂閱(Subscription)
通過訂閱一個訂閱主題建立一個新的釋出。注意模板,是訂閱主題的資料結構。使用訂閱共有三個選擇:
1. 使用訂閱主題的控制代碼,進行手動複製操作。
2. 作為函式的回撥(callback),在訂閱主題更新時,函式被呼叫。
3. 作為類方法的回撥(相當於函式,但是是C++型別的)
單純訂閱
除非手動呼叫複製方法,否則資料不會被複制。
- unsigned min_interval =500;
- _sub_rc_chan = _n.subscribe<px4_rc_channels>(min_interval);
每次訂閱主題更新,則'rc_channels_callback_function'被呼叫。
- unsigned min_interval =500;
- _n.subscribe<px4_rc_channels>(rc_channels_callback_function, min_interval);
相當於前面函式的例子。
- _n.subscribe<px4_rc_channels>(&SubscriberExample::rc_channels_callback, this, min_interval);
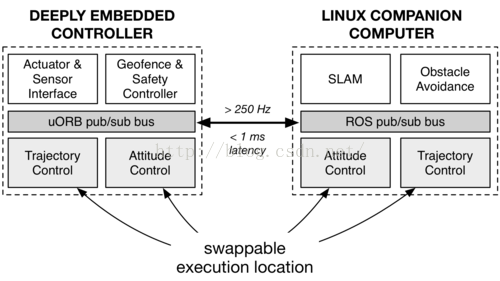
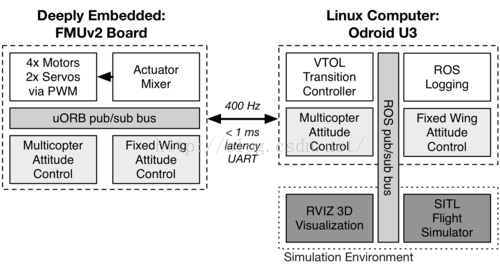
混合系統
為了解決更高級別的挑戰,比如基於視覺的避障或者複雜控制問題,一個執行嵌入式Linux的伴隨計算機將非常有用。
整合ROS
PX4可以通過兩種不同的API與ROS整合到一起:或者自然地將每一個應用作為ROS節點,或者通過在嵌入式自駕儀上唯一地執行
DroneAPI
DroneAPI是一個高階應用程式介面,類似於一個為遠端過程呼叫(RPC)提供語言繫結的函式庫。從本質上講,它是面向告訴無人機去哪裡或做什麼,而不是核心的機器人通訊/ API的一部分。
參考
如下的同行評審論文描述了更高階的架構:
Lorenz Meier, DominikHonegger and Marc Pollefeys. PX4: A Node-Based Multithreaded Open SourceRobotics Framework for Deeply Embedded Platforms, ICRA (Int. Conf. on Roboticsand Automation) 2015. (to appear)
相關推薦
PX4二次開發
軟體架構 PX4 在廣播訊息網路內,按照一組節點(nodes )的形式進行組織,網路之間使用像如“姿態”和“位置”之類的語義通道來傳遞系統狀態。軟體的堆疊結構主要分為四層: 應用程式介面:提供給app開發人員,使開發人員可以使用ROS或者。這一介面設計儘可能簡潔和扁平
PX4二次開發——基於mahony演算法的姿態估計
PX4裡面有兩種姿態估計演算法,一種是基於EKF的,還有一種是基於mahony的,雖然mahony演算法簡單而且計算量少,但效能並不輸EKF多少。這裡我們講一下基於mahony的姿態估計演算法,本來我還想在正式開始前為大家補充一下座標系、四元數、尤拉角和旋轉矩陣等一
dedecms二次開發:dedetemplate.class.php 動態模板類
filename 外部 運行 mpi public esc val net color dedecms二次開發目錄點這個:dedecms二次開發教程目錄 核心類文件 include/dedetemplate.class.php 用途:用於非核心模塊的動態頁面或列表頁的模板解
VB.Net實現下CATIA二次開發方法
ror 點擊 doc struct cat inf 定義 then ports 源自網絡。 在visual studio(vb,c#,c++)下使用CATIA進行二次開發有如下特點: -->需要引用CATIA的對象庫 -->需要對象聲明(visua
呼叫中心系統OA二次開發
清單 二次開發 工作 註意 分辨率 傳真 新增 歷史 有效 1. 既有修改 分辨率顯示自適應調整 工作流數據調整 2. 呼叫中心 語音電話 l 新建任務 字段:任務主題、語音主題、提
(6)微信二次開發 之 微信文本消息接口實現
微信 odin link 消息處理 nal puts 算法 帳號 接口實現 p.p1 { margin: 13.0px 0.0px 13.0px 0.0px; text-align: justify; font: 16.0px SimSun } p.p2 { margin:
學習 MeteoInfo二次開發教程(一)
mat 沒有 組件 資源管理 img 教程 layer 添加 bbs 來自氣象家園:http://bbs.06climate.com/forum.php?mod=viewthread&tid=6631 按照教程,沒有太大問題,有些是對c#操作不熟悉導致。 1.添加d
學習 MeteoInfo二次開發教程(三)
開發教程 cnblogs false raw class .dll dll inf legend 1.breakList的問題 ((PolygonBreak) aLS.breakList[0]).DrawFill=false; 新的類庫將LegendScheme的brea
學習 MeteoInfo二次開發教程(四)
手動添加 map dem itl 數控 nas 字號 south title 教程四的問題不大。 1.private void AddMapFrame_ChinaSouthSea()、private void AddTitle()兩個函數和public Form1()函數並
Revit二次開發--Hello World
man dem users att try encoding cli 引用 類庫 部署完開發環境,就要進行每次學習新的技能,必寫的Hello World。 1、打開VS開發環境,新建一個項目類庫RevitDemo。 2、修改Class1名稱為Command。 3、在引
GTS-800二次開發基本流程總結
win highlight line names 關閉 參數 ble 名稱 速度 1、打開控制器 GT_Open 2、啟動伺服使能 GT_ClrSts 3、軸規劃位置清零 GT_SetPrfPos 4、軸運動模式
AE二次開發,解決子窗體使用父窗體的AxControl控件
控件 con pri apc sha item object new end 在子窗體寫構造函數,然後再在父窗體按鈕點擊事件下寫 public frmIDW(AxMapControl axMapControl1) { Initia
學習MeteoInfo二次開發教程(十二)
odi 資源 level 無法訪問 .cn oid pub images bsp 1.添加新的Form窗體: 在解決方案資源管理器中,右鍵MeteoInfoDemo,“添加”,“Windows 窗體” 2.新窗體中添加好layersLegend1和Layout之後,要把la
一個星期實現二次開發,解決很多用戶無法解決的問題
解決方案 版本號 臨時性 開發 用戶 最近,收到一個用戶的體驗分享,他用一個星期完成對H3的從陌生到基本熟悉,再從基本屬性到基本二次自定義開發,對於他對我我們H3的支持,我們表示感謝~~以下是對該用戶的實例分享整理。-------------------------------------
java代碼生成器 快速開發平臺 二次開發 外包項目利器 springmvc SSM後臺框架源碼
java 下拉聯動 頭像裁剪 圖片裁剪 springmvc A 調用攝像頭拍照,自定義裁剪編輯頭像,頭像圖片色度調節 B 集成代碼生成器 [正反雙向](單表、主表、明細表、樹形表,快速開發利器)+快速表單構建器 freemaker模版技術 ,0個代碼不用寫,生成完整的一個模塊,帶
QGIS(PYTHON3.5、QT5.7.1、QGIS3)系列二次開發環境
qgis c++ python 二次開發 QGIS(PYTHON3.5、QT5.7.1、QGIS3系列二次開發環境,所有環境以虛擬機方式提供,以便研究或直接使用。 具體包括:獨立應用二次開發環境(WINDOWS,LINUX);android二次開發;獨立應用PYTHON二次開發環境(WI
AE二次開發中幾個功能速成歸納(符號設計器、創建要素、圖形編輯、屬性表編輯、緩沖區分析)
文件夾路徑 及其 基本框架 option 開啟 rgs database ets remove /* * 實習課上講進階功能所用文檔,因為趕時間從網上抄抄改改,湊合能用,記錄一下以備個人後用。 * * --------------------------------
k3 wise 序時簿二次開發2
eid 響應 idt eventid ins mar .get ont rdp 這是系統自帶的一些按鈕的事件ID和名稱 300014 單據拆分後事件 300013 單據拆分前事件 300012 單據合並後事件
Web報表工具FineReport二次開發JS之字符串
報表 獲取字符串 網頁 簡介 popu 能夠 int() 例如 位置 在報表開發過程中,有些需求可能無法通過現有的功能來實現。須要開發者二次開發,以FineReport為例。能夠使用網頁腳本、API接口等進行深入的開發與控制。考慮到JS腳本開發的使用較多。這裏先先簡介怎
結合Django+celery二次開發定時周期任務
由於 抓取 而是 文檔 code 機會 編輯 越來越大 內存泄漏 需求: 前端時間由於開發新上線一大批系統,上完之後沒有配套的報表系統、監控,於是乎開發、測試、產品、運營、業務部、財務等等各個部門就跟那饑渴的餓狼一樣需要 各種各樣的系統數據滿足他們。剛開