
編譯安裝及執行單目ORBSLAM2在Ubuntu14.04
前言
ORBSLAM2是一個非常適合SLAM入門學習的開源工程。它支援單目、雙目、RGB-D使用,可以計算攝像機的軌跡,並且重建稀疏的3D地圖。
官網有原始碼和配置教程,地址是
1 安裝必要工具
首先,有兩個工具是需要提前安裝的。即cmake和Git。
sudo apt-get install cmake
sudo apt-get install git
2 安裝Pangolin,用於視覺化和使用者介面
安裝依賴項:
sudo apt-get install libglew-dev
sudo apt-get install libpython2.7-dev
先轉到一個要儲存Pangolin的路徑下,例如~/Documents,然後
git clonehttps://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
make –j
sudo make install
最低的OpenCV版本為2.4.3,建議採用OpenCV 2.4.11或者OpenCV 3.2.0。從OpenCV官網下載OpenCV2.4.11。然後安裝依賴項:
sudo apt-get install build-essential
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
將下載的OpenCV解壓到自己的指定目錄,然後cd到OpenCV的目錄下。
cd ~/Downloads/opencv-2.4.11
mkdir release
cd release
cmake -D CMAKE_BUILD_TYPE=RELEASE -DCMAKE_INSTALL_PREFIX=/usr/local ..
make
sudo make install
4 安裝Eigen3
最低要求版本為3.1.0。在http://eigen.tuxfamily.org 下載Eigen3的最新版本,一般是一個壓縮檔案,下載後解壓,然後cd到Eigen3的根目錄下。
mkdir build
cd build
cmake ..
make
sudo make install
5 安裝ORBSLAM2
先轉到自己打算儲存ORBSLAM2工程的路徑,然後執行下列命令
git clonehttps://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
./build.sh
之後會在lib資料夾下生成libORB_SLAM2.so,並且在Examples資料夾下生成mono_tum,mono_kitti, rgbd_tum,stereo_kitti, mono_euroc 和 stereo_euroc。
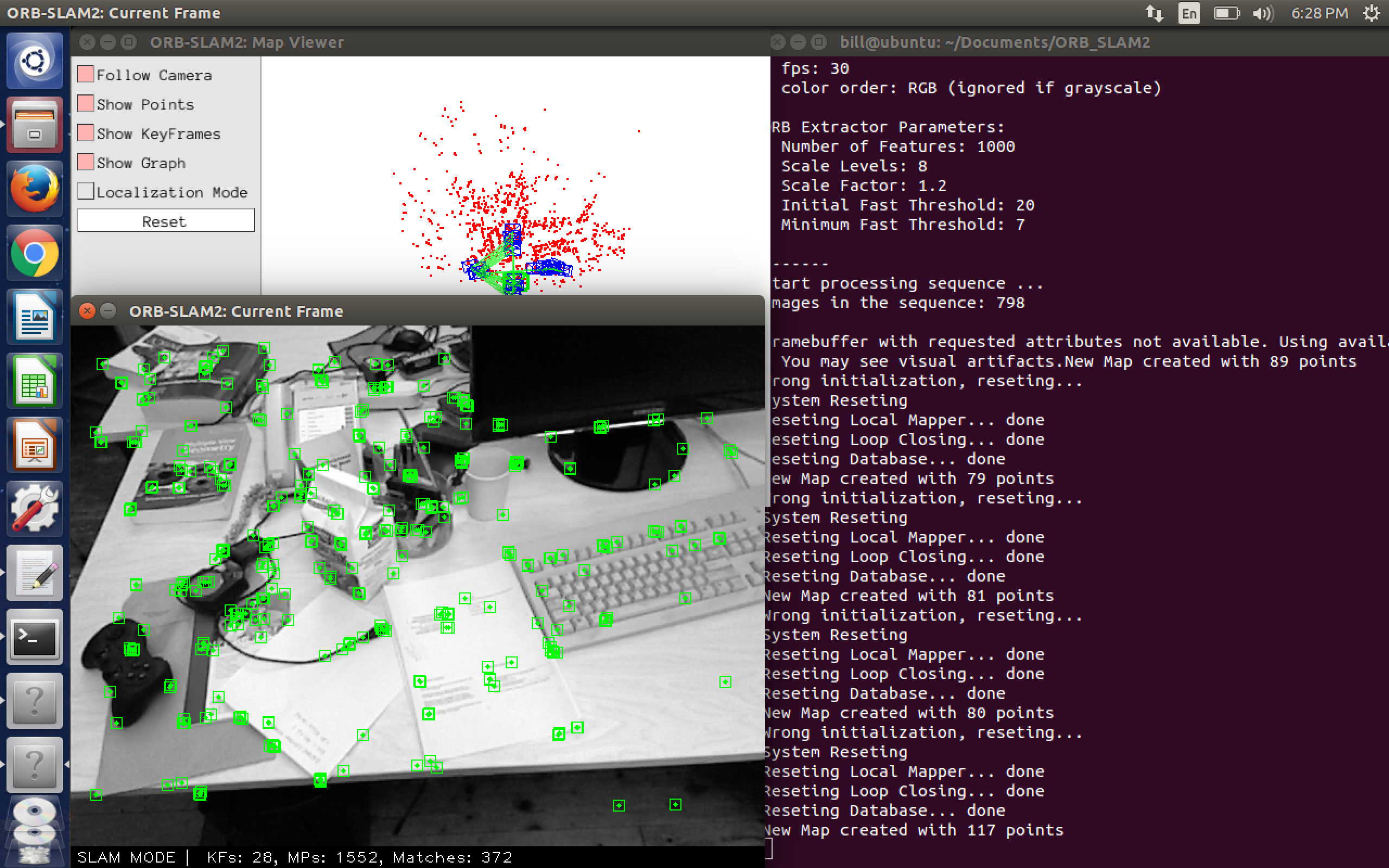
6 執行單目SLAM例項
在http://vision.in.tum.de/data/datasets/rgbd-dataset/download下載一個序列,並解壓。轉到ORBSLAM2資料夾下,執行下面的命令。根據下載的視訊序列freiburg1, freiburg2 和 freiburg3將TUMX.yaml分別轉換為TUM1.yaml,TUM2.yaml,TUM3.yaml。將PATH_TO_SEQUENCE_FOLDER更改為解壓的視訊序列資料夾。
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txtExamples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
例如,我自己的電腦上,該命令變為:
./Examples/Monocular/mono_tumVocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml/home/bill/Downloads/rgbd_dataset_freiburg1_xyz
執行截圖如下:
相關文獻
[Monocular] Raúl Mur-Artal, J. M. M. Montiel and Juan D. Tardós. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics, vol. 31, no. 5, pp. 1147-1163, 2015. (2015 IEEE Transactions on Robotics Best Paper Award). PDF.
[Stereo and RGB-D] Raúl Mur-Artal and Juan D. Tardós. ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. ArXiv preprint arXiv:1610.06475 PDF.
[DBoW2 Place Recognizer] Dorian Gálvez-López and Juan D. Tardós. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Transactions on Robotics, vol. 28, no. 5, pp. 1188-1197, 2012. PDF
相關推薦
編譯安裝及執行單目ORBSLAM2在Ubuntu14.04
前言 ORBSLAM2是一個非常適合SLAM入門學習的開源工程。它支援單目、雙目、RGB-D使用,可以計算攝像機的軌跡,並且重建稀疏的3D地圖。 官網有原始碼和配置教程,地址是 1 安裝必要工具 首先,有兩個工具是需要提前安裝的。即cmake和Git。 sudo
ubuntu14.04中qemu編譯安裝及報錯處理
ubuntu下原始碼編譯安裝步驟 @oli: ./configure --target-list=x86_64-softmmu, x86_64-linux-user @oli: make -j4 @oli: make install -j4 ubuntu編譯qemu報
Flink單節點安裝及執行筆記
Flink 一種大資料計算引擎,和其他計算引擎不同的是,它同時支援流處理和批處理的特點; 那麼首先介紹下,這兩點的概念。流處理,想
vsftpd 編譯安裝 及 隱藏版本號
str 本地服務 沒有 版本號 取數據 賦值 其他 映射 自動啟動 環境:Redhat Enterprise Linux AS 4.0 update2(i386) 不提示,均表示以root權限執行。 [註:]//為註釋符,如“// 建立MySQL組”,即為一句註釋。 我
Linux中如何恢復rm命令誤刪除的文件之extundelete編譯安裝及使用
可用 並且 地址 cat inode res 丟失 lin 所在 1、下載extundelete包,安裝依賴 我用的是Centos系統,在安裝extundelete之前需要安裝e2fsprogs,e2fsprogs-libs,e2fsprogs-devel。 yum in
nginx源碼編譯安裝及配置文件說明
nginx源碼安裝nginx源碼編譯安裝 安裝nginx的依賴包(pcre-devel openssl-devel) [root@anuo ~]# yum install pcre-devel openssl-devel -y 創建管理用戶 nginx [root@anuo ~]# useradd -s /s
SuSE11安裝MySQL5.6.40:編譯安裝方式、單實例
conf set mysq user defaults als back -a 用戶 摘要:SuSE11sp3 64位操作系統、 MySQL5.6.40 編譯安裝、單實例註:kingtry是我的主機名一、環境準備操作系統:SuSE版本11sp3,64位kingtry:~ #
SuSE12安裝MySQL5.7.22:編譯安裝方式、單實例
shell rest rom nec dev nta csu resolv memory 摘要:SuSE12.1 64位操作系統、 MySQL5.7.22 編譯安裝、單實例帶boost和不帶boost的編譯安裝註:kingtry是我的主機名一、環境準備操作系統:SuSE版本
Nginx編譯安裝及編譯參數講解
支持 assembler 臨時文件 files sha cached erro mp4 工具 實驗環境說明:操作系統:Centos 7 64位Nginx版本:Nginx 1.12.2 編譯安裝前的準備:安裝Nginx編譯安裝需要依賴的一些包yum install gcc g
win10:angular-cli安裝及build項目
nload embed -s load href app container base 後端 win10 angular-cli安裝及build項目: https://blog.csdn.net/rongyongfeikai2/article/details/5308447
Nginx編譯安裝及介紹
nginx簡介 nginx時一款輕量級的Web伺服器、反向代理伺服器及郵件代理伺服器; nginx的特點是佔有記憶體少,併發能力強,穩定,功能豐富。 nginx優點 高併發連線:能夠支撐5萬併發連線(官方測試),實際生產環境中支撐2-3萬併發連線數
mysql編譯安裝及常用操作
1.3 安裝相關包 1.3.1 cmake軟體 cd /home/oldboy/tools/ tar xf cmake-2.8.8.tar.gz cd cmake-2.8.8 ./configure #CMake has bootstrapped. Now run gmake. gmak
Zookeeper安裝及執行
zookeeper的安裝分為三種模式:單機模式、叢集模式和偽叢集模式。 單機模式 首先,從Apache官網下載一個Zookeeper穩定版本,本次教程採用的是zookeeper-3.4.9版本。
Linux下Mysql的安裝及執行(詳解)
1、組及使用者建立: sudo groupadd mysql #新增組 sudo useradd -r -g mysql mysql #新增所建立組下的使用者 2、官方下載網址 wget http://downloads.mysql.com/archives/get/file/mysql-5
MAC OS 下protobuf 2.6.1 版本編譯安裝及proto型別檔案編譯
由於工程中proto語法採用的是2.0的,所以選擇安裝2.6.1版本的protobuf。(3.0和2.0語法不同,如果安裝3.0以上版本的protobuf,在編譯的時候應該需要增加啥~~~) 編譯安裝步驟: 1. 安裝 protobuf 依賴項, 其依賴於autoconf、 a
MySQL免編譯安裝及登入(5.6.36)
一、下載MySQL 5.6.36免編譯安裝包並上傳至 /usr/local/src 目錄(也可以使用wget命令直接下載至該目錄) 下載地址 https://yunpan.360.cn/surl_ymCGfFYt2Ya 二、解壓縮 [[email protected] src]# tar zx
Vue 安裝及執行
環境介紹: Win10+WebStorm 一,Vue.js簡介 Vue (讀音 /vjuː/,類似於 view) 是一套用於構建使用者介面的漸進式框架。與其它大型框架不同的是,Vue 被設計為可以自底向上逐層應用。Vue 的核心庫只關注檢視層,不僅易於上手,還便於與第三方
【Ansible】Ansible控制windows外掛安裝及執行error與解決方法
一、 問:因pip版本問題無法安裝kerberos 答:安裝提示需要先安裝pip升級包 下載pip9.0.1升級包: https://pypi.python.org/packa
http-server安裝及執行
既然你知道http-server那麼node和npm的安裝我就不說了,當然你也可以實用Yarn安裝. 重點:請實用管理員許可權安裝 server . npm install http-server -g pm i http-server yarn -g http-serv
【JMeter4.0】安裝及執行(windows環境)
安裝 JDK安裝及配置 安裝對應版本的java環境,配置好環境變數。 版本對應關係參考下表: JMeter版本 JDK版本 4.0 1.8 or 1.9 3.2/3.3 1.8+ 3.0/3.1 1.7+ JDK環境變數配置: “我的