
位置式和增量式PID控制
PID控制是一個二階線性控制器
定義:通過調整比例、積分和微分三項引數,使得大多數的工業控制系統獲得良好的閉環控制性能。
優點
a. 技術成熟
b. 易被人們熟悉和掌握
c. 不需要建立數學模型
d. 控制效果好
e. 魯棒性
通常依據控制器輸出與執行機構的對應關係,將基本數字PID演算法分為位置式PID和增量式PID兩種。
基本PID控制器的理想算式為
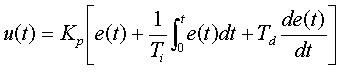
式中
u(t)——控制器(也稱調節器)的輸出;
e(t)——控制器的輸入(常常是設定值與被控量之差,即e(t)=r(t)-c(t));
Kp——控制器的比例放大係數;
Ti ——控制器的積分時間;
Td——控制器的微分時間。
設u(k)為第k次取樣時刻控制器的輸出值,可得離散的PID算式

式中 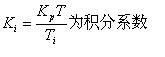
由於計算機的輸出u(k)直接控制執行機構(如閥門),u(k)的值與執行機構的位置(如閥門開
度)一一對應,所以通常稱式(2)為位置式PID控制演算法。
位置式PID控制演算法的缺點:當前取樣時刻的輸出與過去的各個狀態有關,計算時要對e(k)進
行累加,運算量大;而且控制器的輸出u(k)對應的是執行機構的實際位置,如果計算機出現故
障,u(k)的大幅度變化會引起執行機構位置的大幅度變化。
增量式PID是指數字控制器的輸出只是控制量的增量Δu(k)。採用增量式演算法時,計算機輸出的控制量Δu(k)對應的是本次執行機構位置的增量,而不是對應執行機構的實際位置,因此要求執行機構必須具有對控制量增量的累積功能,才能完成對被控物件的控制操作。執行機構的累積功能可以採用硬體的方法實現;也可以採用軟體來實現,如利用算式 u(k)=u(k-1)+Δu(k)程式化來完成。
由式(2)可得增量式PID控制算式

式中 Δe(k)=e(k)-e(k-1)
進一步可以改寫成

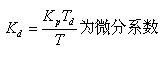
式中 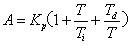
一般計算機控制系統的取樣週期T在選定後就不再改變,所以,一旦確定了Kp、Ti、Td,只要使用前後3次測量的偏差值即可由式(3)或式(4)求出控制增量。
增量式演算法優點:①算式中不需要累加。控制增量Δu(k)的確定僅與最近3次的取樣值有關,容易通過加權處理獲得比較好的控制效果;②計算機每次只輸出控制增量,即對應執行機構位置的變化量,故機器發生故障時影響範圍小、不會嚴重影響生產過程;③手動—自動切換時衝擊小。當控制從手動向自動切換時,可以作到無擾動切換。
我的工作是做一個溫控系統(不帶冷卻裝置),加熱裝置就是一般的熱水壺。通過採集所得的溫度誤差,經PID演算法得出控制量,再利用控制量去改變由微控制器輸出的PWM波的佔空比。最後將PWM波送到繼電器以控制熱水壺加熱和不加熱。
我個人理解是必須用位置式PID。因為微控制器輸出的PWM波的佔空比不帶記憶性,你算一次PID意味著佔空比就完全改變,也就是一個全新的值,不帶記憶性。而像在執行機構為步進電機的控制系統裡,你給一次控制量到步進電機,它就保持在那裡。當你下一次再輸入控制量到步進電機,它就將這一次的控制量疊加上去,也就是說有記憶性。