
Pixhawk原生韌體PX4之offboard
offboard
PX4中的offboard(暫譯作外部控制)是一個非常強大的功能。可以接受來自外部的控制指令,按照目前的瞭解來看,offboard搭配上MAVROS以及類似於TX1/NUC板載計算器,在PX4這個穩定的飛控平臺上加上視覺處理或者人工智慧,大有可為。
配置說明
官網上有一個外部控制的例程,讓飛機起飛到2米的高度(x = 0, y = 0, z =0),這裡使用的是ROS裡面的座標系,並不是PX4韌體中的NED,MAVROS中已經完成了座標轉換,這一點的話暫時不用深究。
本文主要講一講使用數傳以及Pixhawk飛控板的外部控制方法:所需的只是一臺Ubuntu系統的電腦以及一架帶有數傳的飛機。首先還是環境的配置,
需要做的只有三個步驟:
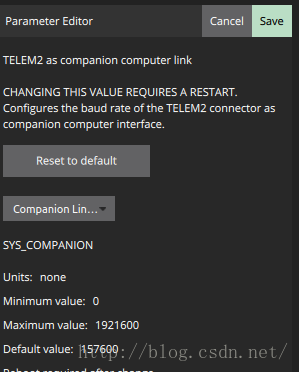
- 配置Pixhawk上的
Telema 2修改SYS_COMPANION引數改成Companion Link(57600)
- 將飛控連上MAVROS
roslaunch mavros px4.launch fcu_url:=serial:///dev/ttyUSB0:57600
執行外部控制例程
rosrun offb_ctrl offb_ctrl_node搞定 起飛了
- 其中offboard的C++例程如下
/**
* @file offb_node.cpp
* @brief offboard example node, written with mavros version 0.14.2, px4 flight
* stack and tested in Gazebo SITL
*/
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include - 關於ROS座標系與PX4座標系的轉換
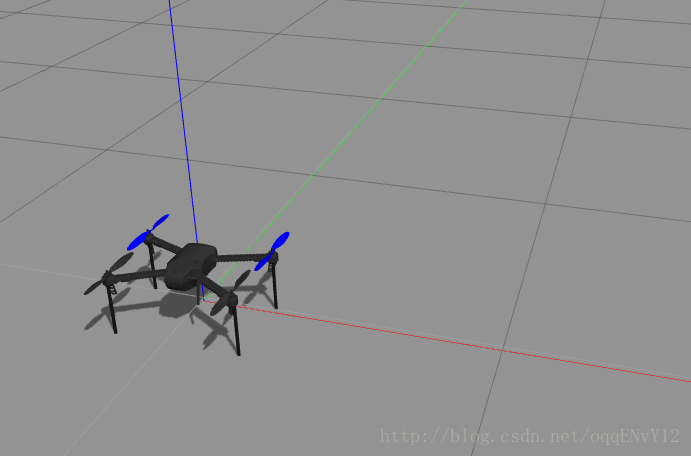
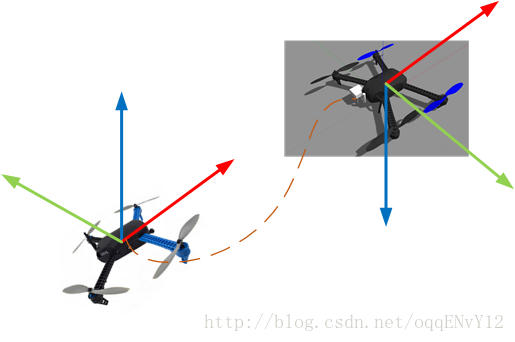
如圖所示:iris四旋翼藍色槳對應的為機頭方向。
ROS中的座標是ENU(東北天)座標系,而PX4中是NED(北東地)座標系。MAVROS這個ROS包中已經進行了座標轉換。
通過ROS節點控制PX4飛機的位置時,座標有如下的對應關係
| ROS | PX4 |
|---|---|
| x | y |
| y | x |
| z | alt(-z) |
進行控制時要把ROS座標系跟PX4的座標系分離開來,攝像頭座標系Z軸沿光軸向下,X軸朝機頭方向,根據右手法則確定Y軸指向飛機右側。使用AprilTag或ArUco庫可以直接通過相應編碼的二維碼得到飛機的位置姿態。對於位置誤差
err_x = pose.x;
err_y = -pose.y;
err_z = -pose.z;根據位置誤差可以得到速度的設定值
目前存在的問題:
- 沒有GPS或者輔助定位裝置,這種直接設定位置的飛行是如何辦到的?
- MAVROS執行時,offboard模式無法打斷,遙控器都切不過去,危險
- ROS都不會,哪麼搞?
問題2的話直接採用手動設定模式的方法即可
奇技淫巧
Nomachine是一款高階的遠端桌面訪問工具。
怎麼說呢,機載協同計算機(跑著Ubuntu系統)上裝一個這個軟體作為目的主機,然後本地計算機(Windows或者Ubuntu系統的電腦)上也裝上這個軟體,只要兩臺計算機在連在同一個區域網中,就能在本地操作飛機上的計算機了。
直接遠端控制飛機上的電腦,QQ遠端協助用過吧
就像上面這樣,在win7上可以操作另一臺Ubuntu主機,這時你就可以進Ubuntu的Terminal跑你想執行的ROS節點了。
而且操作也是非常簡單
開啟軟體
可以看到這裡已經搜到一個網內的客戶機了點選連線(Connect)
這裡我是用Win7控制Ubuntu,因此在這裡需要輸入目標主機Ubuntu的賬號密碼,登陸後就可以看到上面圖中顯示的Ubuntu介面了。操作說明
就但是遠端協助那樣去操作就行了。
這裡要介紹的是退出操作,從客戶機退出需要將滑鼠移動到畫面的右上角,點下去你就知道了。

軟體面向使用者的體驗做的不錯,人人都能直接上手,贊一個!
TroubleShooting
GeographicLib報錯
[FATAL] [1506043767.570923014]: UAS: GeographicLib exception: File not readable /usr/share/GeographicLib/geoids/egm96-5.pgm | Run install_geographiclib_dataset.sh script in order to install Geoid Model dataset! [mavros-1] process has died [pid 14648, exit code -5, cmd /home/donghee/catkin_ws/devel/lib/mavros/mavros_node __name:=mavros __log:=/home/donghee/.ros/log/a61f72a6-9f34-11e7-80c3-7cb0c21790bc/mavros-1.log]. log file: /home/donghee/.ros/log/a61f72a6-9f34-11e7-80c3-7cb0c21790bc/mavros-1*.log解決方案
到catkin空間中下載mavros原始碼,並執行其中的指令碼,應該是解決依賴性問題。cd ~/catkin_ws/src/mavros/mavros/scripts sudo ./install_geographiclib_dataset.sh