
Unity 中的旋轉
參考
一、Unity中的Rotation
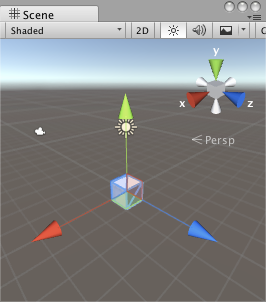
在unity中,旋轉的表示的常用方法之一,是一個三維向量(x、y、z):

圖1、Unity中的旋轉
實際上這是尤拉角。這三個分量分別是繞x軸、y軸、z軸旋轉的角度。
要對一個object進行旋轉,還可以通過程式碼:
transform.Rotate(x, y, z);這裡,如果看過《座標系》一文,就會產生以下兩個疑問:
1)x軸、y軸、z軸指的是那組基?是世界座標系下的xyz軸,還是本地座標系下的xyz軸?
2)旋轉的正方向是如何確定的?
下面分別討論。
二、旋轉軸:靜態尤拉角和動態尤拉角
首先回答第一個問題:到底哪個是旋轉軸。這又要分為 3種情況。
1、旋轉軸:Editor 中 Transform的旋轉數值
對這個情況來說,其顯示的旋轉軸既不是世界座標系的座標軸,也不失本地座標系的座標軸。Editor中transform的旋轉軸是父節點的座標軸。這點在editor中看的非常明顯,因此不再贅述。
2、旋轉軸:在script中使用 rotate 函式,在 Space.Self 中旋轉
Rotate 函式有兩個入參:
public void Rotate(Vector3 eulerAngles, Space relativeTo = Space.Self);
第二個入參的取值有兩種:Space.Self 或者 Space.World。我們先看預設的 Self 的情況。使用下面的一段簡單的程式碼來進行測試:
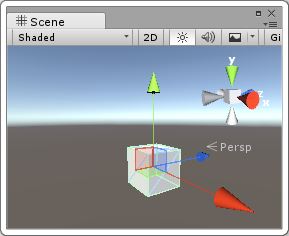
場景中進行測試的是一個圓柱體,其父節點的旋轉為(30,30,0),圓柱體初始的旋轉為(30,0,0),每次按下R鍵,就會在Space.Self 下繞 Y軸旋轉10度,則結果為:public class TestRotate : MonoBehaviour { public Space rotateSpace; // Update is called once per frame void Update () { if (Input.GetKeyDown(KeyCode.R)) transform.Rotate(new Vector3(0, 10, 0), rotateSpace); } }
 圖2、在Space.Self中旋轉
圖2、在Space.Self中旋轉
可以看到,圓柱體是繞著本地座標系的Y軸旋轉的。使用Space.Self進行旋轉,旋轉軸就是本地座標系的座標軸。
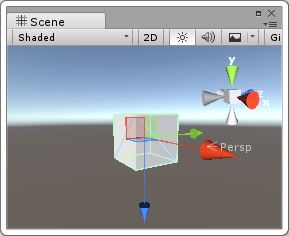
3、在script中使用 rotate 函式,在 Space.World 中旋轉
下面測試 Space.World
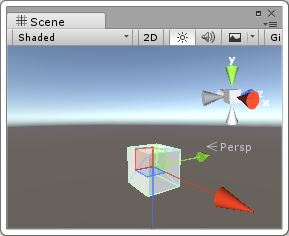
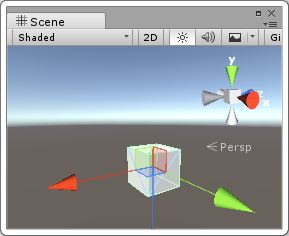
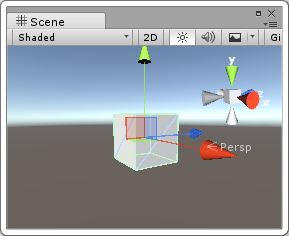
圖3、在Space.World中旋轉
注意到這裡 Parent 的 Y軸並不是 world 的 Y 軸,而這裡的圓柱體明顯是繞著世界座標系下的 Y 軸旋轉的,所以如程式碼所述,使用Space.World旋轉,旋轉是繞著世界座標系的座標軸旋轉的。4、靜態尤拉角和動態尤拉角
前面說到的旋轉軸的問題,在數學上有對應的概念。這就是所謂的靜態尤拉角和動態尤拉角。
所謂靜態尤拉角,就是其旋轉軸使用的是靜止不動的參考系。動態尤拉角,使用的是剛體本身作為參考系,因而會隨著剛體的旋轉而旋轉。
因此,再看看前面的三種情況,使用Space.World旋轉,以及 Editor 中的旋轉,是靜態尤拉角;使用Space.self,是動態尤拉角。
三、旋轉的正方向
由於上面的程式碼是每次使得圓柱繞Y軸旋轉10度,因此從上面的動圖就可以看到,是符合左手規則的,即以左手大拇指指向旋轉軸,則四指指向為正方向。
這其實是當然的:unity的本地座標系和世界座標系都是左手座標系,當然應該使用左手法則。
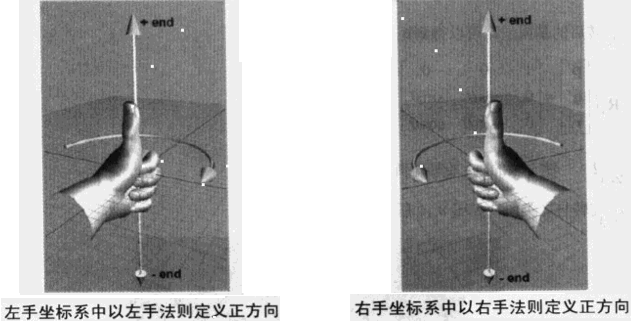
圖4、旋轉的正方向
四、旋轉的順序
我們之前使用的旋轉是一個vector3,包含x、y、z三個向量,分別對應著對 X旋轉軸、Y旋轉軸、Z旋轉軸進行旋轉。這裡就又產生了一個問題:他是如何繞著這三個軸旋轉的呢?
我們也分為靜態尤拉角和動態尤拉角的情況討論。
1、靜態尤拉角
這種情況對應著上面的editor中顯示的旋轉,以及使用Space.World進行的旋轉。即使旋轉軸保持不變,旋轉的順序也決定了最後的旋轉效果,我們來看下面的例子:
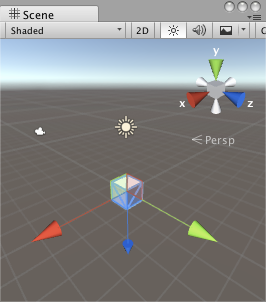
現在有一個物體擺放在世界中,現在我們要讓他旋轉角度(90,90,0)。現在有兩種方法。
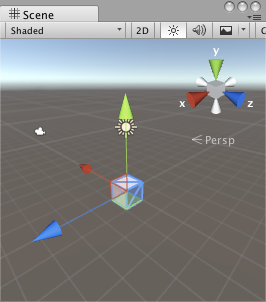
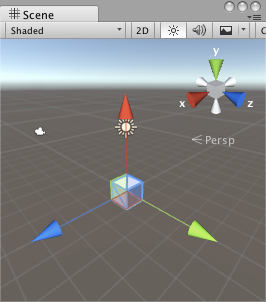
1)首先繞世界座標系的x軸旋轉90度,再繞世界座標系的y軸旋轉90度
 |
 |
 |
| 初始狀態 | 繞x旋轉90度 | 再繞y旋轉90度 |
2)首先繞世界座標系的y軸旋轉90度,再繞世界座標系的x軸旋轉90度
 |
 |
 |
| 初始狀態 | 繞y軸旋轉90度 | 再繞x軸旋轉90度 |
3)旋轉順序的影響
可以看到,結果完全不同!
其實從數學上也是可以理解的。在座標系一文中我們說到,座標系變換就相當於乘以變換矩陣,現在的旋轉,實際上就是座標系變換。而矩陣乘法是不滿足交換律的,因此旋轉的順序不能交換,否則會得到不同的結果。
對於旋轉的順序,一般沒有定式,需要明確指出其順序。對此有一個專門的術語,稱為順規。如果在這個座標系中的旋轉,先繞x軸旋轉,再繞y軸,最後再繞z軸,則稱之為X-Y-Z順規。以此類推。
對於Unity,從文件中可以看到,使用的是Z-X-Y順規,這是一種常用的順規,可以一定程度上避免萬向節鎖(這一概念我們會在下面討論)。因此在unity中,使用靜態尤拉角旋轉(90,90,0),會得到第1小節中的情況:
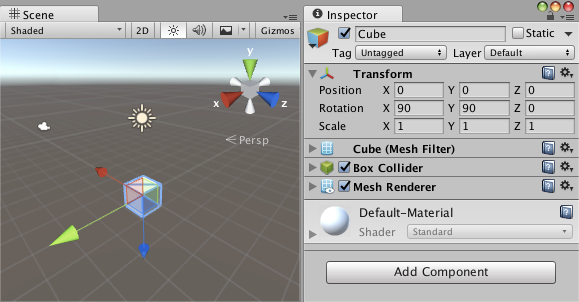
圖5、Unity中靜態尤拉角的旋轉順序
2、動態尤拉角
動態尤拉角除了上面說到的順規問題,還有一個額外的疑問:比如一個物體,初始狀態記為A,以zxy順規旋轉(90,90,0),由於沒有z軸旋轉,第一步當然是繞著當前的x軸旋轉90度,此時狀態記為B,那麼第二步要繞著y軸旋轉90的時候,是繞著初始狀態A時的y軸旋轉,還是繞著此時的B狀態下的y軸旋轉呢?
首先來看兩者的區別:
1)以初始狀態A時的y軸旋轉:
 |
 |
 |
| 初始狀態 | 繞x軸旋轉90度 | 繞A狀態的y軸旋轉90度 |
2)以狀態B下的y軸旋轉:
 |
 |
 |
| 初始狀態 | 繞x軸旋轉90度 | 繞B狀態的y軸旋轉90度 |
3)unity中的情況:
那麼實際中使用的是什麼方式呢?執行以下程式碼,會看到結果如下:
transform.Rotate(new Vector3(90, 90, 0), Space.Self);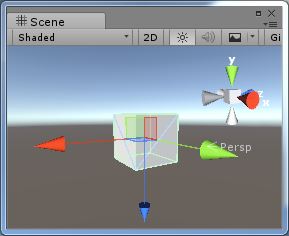
圖6、Unity中動態尤拉角的旋轉順序
可以看到和情況1)相同,所以確認結果為1)。
如果分兩次旋轉,執行以下程式碼:
transform.Rotate(new Vector3(90, 0, 0), Space.Self);
transform.Rotate(new Vector3(0, 90, 0), Space.Self); 圖7、在Unity中,使用動態尤拉角兩次旋轉
圖7、在Unity中,使用動態尤拉角兩次旋轉
最終結論是:每次使用Space.self進行rotate時,都是繞著呼叫時刻的座標軸進行旋轉的。
3、靜態尤拉角和動態尤拉角的等價形式
這裡展開討論一下,靜態尤拉角和動態尤拉角是可以相互轉換的。具體的數學公式可以參考這篇部落格。
其結論就是:在Space.World中旋轉以 Z-X-Y 歸順旋轉角度(x、y、z),等價於在Space.Self中分別順次旋轉(0,y,0)、(x,0,0)、(0,0,z)。
從程式碼上來說,就是以下兩段程式碼等價:
private void Rotate_World(float x, float y, float z) {
transform.Rotate(x, y, z, Space.World);
}
private void Rotate_Self(float x, float y, float z) {
transform.Rotate(0, y, 0, Space.Self);
transform.Rotate(x, 0, 0, Space.Self);
transform.Rotate(0, 0, z, Space.Self);
}五、萬向節鎖(Gimbal Lock)
1、什麼是萬向節鎖
在討論尤拉角旋轉的時候,一個繞不開的話題,就是萬向節鎖。
對萬向節鎖的定義可以參考這個視訊。簡單來說,就是兩個旋轉軸發生了重合。如下圖:
 旋轉(90,0,z) |
 旋轉(90,y,0) |
可以看到繞Y軸和繞Z軸旋轉產生的效果是相同的,都是在同一個平面旋轉。即 Y 軸和 Z 軸產生了共線。
乍一看這很難以理解:在Editor中旋轉是使用的是靜態尤拉角,旋轉軸是固定的,他們兩兩正交,怎麼可能會共線?
首先我們從直觀上來解釋。這就要說到上面最後一小節的靜態尤拉角和動態尤拉角的互相轉換。注意到Unity中的旋轉是 Z-X-Y 規順,其和使用動態尤拉角 Y-X-Z 規順進行旋轉等價。而經過動態尤拉角(0,y,0)、(90,0,0)的旋轉之後,Z 軸就和初始狀態的 Y軸共線。因此這個時候,繞著 Z 軸旋轉,就和在世界座標系下繞著 Y 軸旋轉產生的效果類似了。
從數學上也可以解釋這個問題。這裡可以參考CandyCat的文章:

可以看到第三維不會產生變化,這就是旋轉分量的缺失。
2、如何產生萬向節鎖
從上面的過程就可以看到,要產生萬向節鎖,只需針對規順的中間的那個座標軸,進行90度的旋轉,就會使得規順前後兩頭的座標軸產生共線。對於Unity中使用的Z-X-Y規順,這個中間的座標軸就是X軸。
3、萬向節鎖的問題
很多文章中都會提到,產生了萬向節鎖之後,就會導致丟失一個旋轉分量。但實際上,就算產生了如上的萬向節鎖,看似不能在繞著原來的世界座標系的Z軸旋轉,但只要呼叫 Rotate(0,0,z,Space.World),就仍然可以讓該物體旋轉,並不會讓物體無法旋轉。
實際上,萬向節鎖真正的問題出在做插值動畫的時候。
比如,起始狀態如下,產生了萬向節鎖:
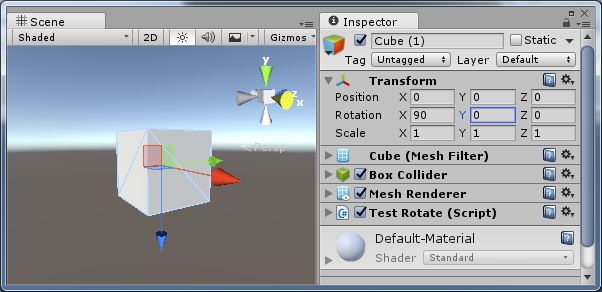
圖8、初始狀態
現在想要讓他旋轉到以下狀態:
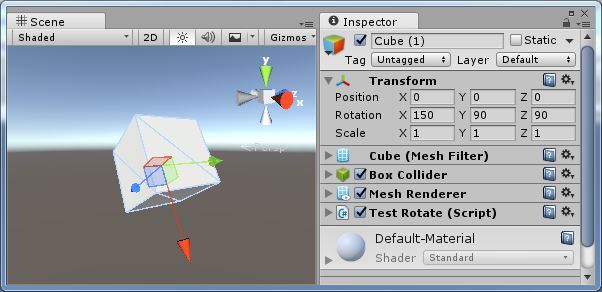
圖9、結束狀態
那麼理想的情況如下:
圖10、期望的旋轉
但是,注意到由於萬向節鎖的存在,中間旋轉角度(x、y、z)需要產生跳變,那麼如果使用普通的插值,就會要從(90,0,0)到(150,90,90)進行插值,那麼效果如下:

圖11、用尤拉角進行插值
可以看到,物體會沿著一條弧線進行旋轉。這就是萬向節鎖的問題。
4、在尤拉旋轉中盡力規避萬向節鎖
前面說到,產生萬向節鎖的關鍵是規順的中間的那條座標軸。只要不繞著這個座標軸旋轉90度,就不會發生旋轉分量丟失的問題。這就是為什麼大多數軟體都將 X 軸作為中間的那條座標軸的原因:常見的旋轉插值是對Camera進行的,而如果繞著X軸旋轉90度,則意味著正向上,或是正向下,這兩種情況都是非常少見的。也就是說,相比於Y軸和Z軸,繞X軸旋轉90度是非常少見的。這樣就可以儘量的避免萬向節鎖。
但這終歸是指標不治本的方法,另一種完全解決這個問題的方法,就是不再採用尤拉角表示旋轉,這就是我們下面要討論的四元數。
六、Quaternion(四元數)旋轉
1、什麼是四元數
要表示旋轉,其實一個更直接的方式是使用他的變換矩陣,但是矩陣需要的儲存空間太大,而這個矩陣中有大量的冗餘資料。這就產生了四元數。
對於四元數的解釋,可以參考CandyCat的文章,寫的非常清楚。這裡摘錄一部分:
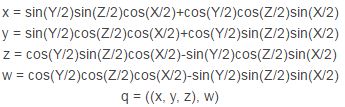
給定一個單位長度的旋轉軸(x, y, z)和一個角度θ。對應的四元數為:

給定一個Y-Z-X規順的尤拉旋轉(X, Y, Z),則對應的四元數為:
2、用四元數進行旋轉
Unity中的四元數支援和一個Vector3相乘,如果把這個Vector3看作一個向量,那麼左乘一個四元數,就相當於對這個向量進行對應的旋轉。