
【STM32】STM32之限位開關
1、限位開關是什麼?
答:限位開關其實就是會復原開關的開關按鍵。
也就是說按下限位開關的開關能觸發STM32的IO中斷,而鬆開手指時限位開關會復原。
2、限位開關有什麼用?
答:通常被用於限制電機轉動角度來使用。
例如兩個限位開關形成45°的夾角,一旦電機轉動觸發任意其中一個限位開關,STM32檢測到限位開關的中斷則停止電機,不能再繼續往此方向轉動。
3、限位開關有什麼優缺點?
答:限位開關的優點是以物理的方式觸發微控制器中斷,因此不增加功耗。缺點是經常使用的話限位開關易損壞。
4、限位開關在軟體上應如何開發?
答:由於限位開關通常是兩個,因此按照普通按鍵的形式寫兩個按鍵,在按鍵中斷中做停止電機等處理即可。
六、實驗步驟
1、編寫並新增限位開關驅動
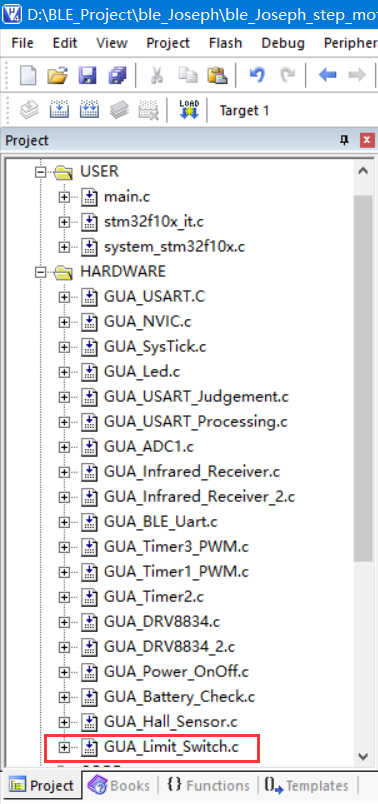
1)編寫驅動GUA_Limit_Switch.c(存放在“……\HARDWARE”)
//******************************************************************************
//name: GUA_Limit_Switch.c
//introduce: 限位開關驅動
//author: 甜甜的大香瓜
//email: 2)編寫驅動標頭檔案GUA_Limit_Switch.h(存放在“……\HARDWARE”)
//******************************************************************************
//name: GUA_Limit_Switch.h
//introduce: 限位開關驅動標頭檔案
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜微控制器之STM8/STM32(164311667)
//changetime: 2016.12.28
//******************************************************************************
#ifndef _GUA_LIMIT_SWITCH_H_
#define _GUA_LIMIT_SWITCH_H_
/*********************巨集定義************************/
#ifndef GUA_U8
typedef unsigned char GUA_U8;
#endif
#ifndef GUA_8
typedef signed char GUA_8;
#endif
#ifndef GUA_U16
typedef unsigned short GUA_U16;
#endif
#ifndef GUA_16
typedef signed short GUA_16;
#endif
#ifndef GUA_U32
typedef unsigned long GUA_U32;
#endif
#ifndef GUA_32
typedef signed long GUA_32;
#endif
#ifndef GUA_U64
typedef unsigned long long GUA_U64;
#endif
#ifndef GUA_64
typedef signed long long GUA_64;
#endif
//可讀的限位開關
#define GUA_LIMIT_SWITCH_STATUS_UP 0 //UP限位開關
#define GUA_LIMIT_SWITCH_STATUS_DOWN 1 //DWON限位開關
//限位開關的觸發狀態
#define GUA_LIMIT_SWITCH_STATUS_TRIGGER 0 //限位開關觸發
#define GUA_LIMIT_SWITCH_STATUS_IDLE 1 //D位開關沒觸發
/*********************外部函式宣告************************/
GUA_U8 GUA_Limit_Switch_Check_Pin(GUA_U8 nGUA_Limit_Switch_Status);
void GUA_Limit_Switch_Init(void);
#endif
3)工程中新增GUA_Limit_Switch.c
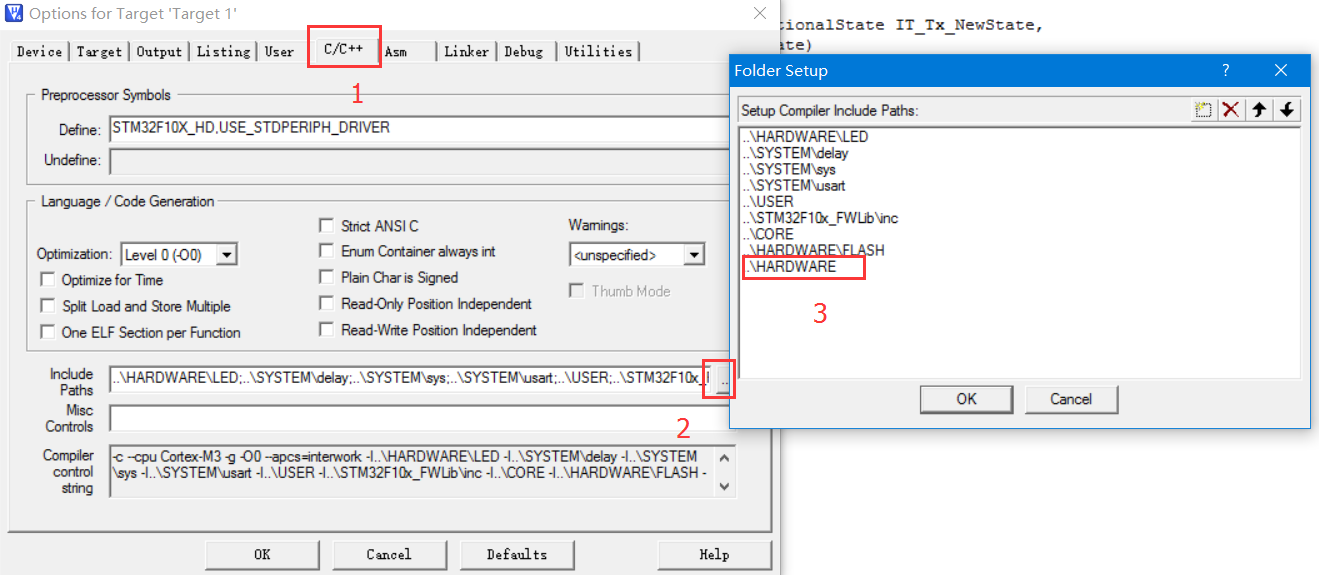
4)在MDK設定中新增串列埠驅動原始檔路徑
2、設定NVIC中斷優先順序(GUA_NVIC.c的GUA_NVIC_Init中)
//限位開關UP鍵
GUA_NVIC_Config(NVIC_PriorityGroup_2, EXTI1_IRQn, 1, 0, ENABLE);
//限位開關DOWN鍵
GUA_NVIC_Config(NVIC_PriorityGroup_2, EXTI4_IRQn, 1, 1, ENABLE); 3、寫中斷服務函式(stm32f10x_it.c中)
1)寫中斷服務函式
//******************************************************************************
//name: EXTI1_IRQHandler
//introduce: 中斷服務函式
//parameter: none
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜微控制器之STM8/STM32(164311667)
//changetime: 2016.10.19
//******************************************************************************
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) == SET)
{
/*
//Up鍵,反轉才停止
if(stMotor_Config_2.DirectionSteps < 0)
{
stMotor_Config_2.Status = MOTOR_CONFIG_STATUS_IDLE; //電機Y停止
}
*/
//清除標誌位
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
//******************************************************************************
//name: EXTI4_IRQHandler
//introduce: 中斷服務函式
//parameter: none
//return: none
//author: 甜甜的大香瓜
//email: [email protected]
//QQ group 香瓜微控制器之STM8/STM32(164311667)
//changetime: 2016.10.19
//******************************************************************************
void EXTI4_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line4) == SET)
{
/*
//Down鍵,正轉才停止
if(stMotor_Config_2.DirectionSteps > 0)
{
stMotor_Config_2.Status = MOTOR_CONFIG_STATUS_IDLE; //電機Y停止
}
*/
//清除標誌位
EXTI_ClearITPendingBit(EXTI_Line4);
}
}4、在應用層中呼叫
1)新增驅動標頭檔案(main.c中)
#include "GUA_Limit_Switch.h"2)新增驅動初始化程式碼(main.c的main函式中)
//限位開關初始化
GUA_Limit_Switch_Init();七、實驗結果
模擬並設定斷點在兩個限位開關的中斷服務函式中,全速執行後分別按下限位開關,可分別進中斷服務函式。
因此實驗成功。
相關推薦
【STM32】STM32之限位開關
五、基礎知識 1、限位開關是什麼? 答:限位開關其實就是會復原開關的開關按鍵。 也就是說按下限位開關的開關能觸發STM32的IO中斷,而鬆開手指時限位開關會復原。 2、限位開關有什麼用? 答:通常被用於限制電機轉動角度來使用。 例如兩個限位開關形成45°的夾角,一旦電機轉動觸發任意其中一個限
【STM32】STM32之timer3產生PWM
//****************************************************************************** //name: GUA_Timer3_PWM.c
【記錄】STM32學習之第一個程式(點亮LED)
STM32學習之第一個程式(點亮LED) 開發板:Nucelo L053R8 芯 片:STM32L053R8 軟 件:IAR for ARM 7.4, STM32CubeL0 程式碼示例
【STM32】STM32之電量採集
//****************************************************************************** //name: GUA_ADC1.c //introduce:
【STM32】STM32之藍芽透傳模組(昇潤科技HY-254124 V8)
//****************************************************************************** //name: BLE_Uart.c //introduce: 藍芽串
【STM32】STM32之霍爾感測器模組
1、霍爾感測器是什麼? 答:霍爾感測器是根據霍爾效應制作的一種磁場感測器。 用磁鐵去靠近霍爾感測器時,霍爾感測器的引腳電平會產生變化。 2、霍爾感測器主要用在什麼地方? 答:霍爾感測器可測速、計數、限位上。 舉例限位功能:兩個霍爾感測器形成45°的夾角,電機邊緣粘著一個磁鐵,一旦電機轉動導致
【Debug】STM32 HardFault_Handler 故障
3、還是將中斷函式修改,列印中斷時的一些資訊: HardFault_Hander()定義如下: void HardFault_Handler(void) { uint
【C++】C++之位運算子
位運算子 位運算子作用於位,並逐位執行操作。&、 | 和 ^ 的真值表如下所示: p q p&q p|q p^q 0 0 0
【STM32】STM32啟動方式
在少量晶片程式下載時,用JLINK或SWD的下載方式比較繁瑣,串列埠下載配合正點原子的FLYMCU比較快捷,STM32的串列埠下載時候需要注意MCU的啟動方式。在復位時,會按照boot的狀態判斷進入哪種模式,boot腳不用保持長狀態。在根據STM407參考手冊來看,STM32
【STM32】STM32 MCU系列介紹
STM32-32 微控制器(MCU)家族 系列 MCU 主流級別MCU STM32 F0系列-ARM Cortex-M0入門級MCU STM32 F1系列-A
【note】stm32 keilMDK出現warning: function XX declared implicitly
warning: #223-D: function "CLR_TX_DATA" declared implicitly 解決方法。 以上面錯誤提示為例: 1 找到定義函式 CLR_TX_DATA() 的原始檔 ,這裡假設在 a.c 中; 2 在 a.h
【STM32】STM32埠複用和重對映(AFIO輔助功能時鐘)
STM32F1xx官方資料:《STM32中文參考手冊V10》-第8章通用和複用功能IO(GPIO和AFIO)埠複用功能埠複用的定義STM32有許多的內建外設(如串列埠、ADC、DCA等等),這些外設的外部引腳都是和GPIO複用的。也就是說,一個GPIO如果可以複用為內建外設的
【轉】linux之cp/scp命令+scp命令詳解
特殊 是否 用戶登錄 usr 指定 highlight 顯示 檔案 三種 linux之cp/scp命令+scp命令詳解 名稱:cp 使用權限:所有使用者 使用方式: cp [options] source dest cp [options] source
【轉】c#之繼承
none 實現 void 運算符重載 調用方法 需要 strong 靜態 顯式 一.繼承的類型 在面向對象的編程中,有兩種截然不同繼承類型:實現繼承和接口繼承 1.實現繼承和接口繼承 *實現繼承:表示一個類型派生於基類型,它擁有該基類型的所有成員字段和函
【轉】C#之集合
tab 並發集合 get spa style con 都在 src 字典 數組(http://www.cnblogs.com/afei-24/p/6738128.html)的大小是固定的。如果元素的個數是動態的,就應使用集合類。 列表(http://www.cn
【Spring】SpringMVC之異常處理
存儲 targe 存在 cnblogs del file 處理機制 href click java中的異常分為兩類,一種是運行時異常,一種是非運行時異常。在JavaSE中,運行時異常都是通過try{}catch{}捕獲的,這種只能捕獲顯示的異常,通常項目上拋出的異常都是不可
【Spring】SpringMVC之攔截器
https javax request orm bin 支持 exceptio 賬號 intern Spring的HandlerMapping處理器支持攔截器應用。當需要為某些請求提供特殊功能時,例如實現對用戶進行身份認證、登錄檢查等功能。 攔截器必須實現HandlerI
【Spring】SpringMVC之REST編程風格
data springmvc 4.0 gen rip servle truct -name insert REST架構是一個抽象的概念,目前主要是基於HTTP協議實現,其目的是為了提高系統的可伸縮性、降低應用之間的耦合度、便於架構分布式處理程序。 在URL中設置使用
【22】Vue 之 Vue Devtools
rom 創建 png ins -c 擴展程序 安裝 搜索 項目 vue安裝: # 最新穩定版 $ npm install vue # 全局安裝 vue-cli $ npm install --global vue-cli # 創建一個基於 webpack 模板的新項目 $
【轉載】linux之sed用法
span 變量 常用 tdi 選擇 包括 div 輸入 記得 linux之sed用法 原文地址:http://www.cnblogs.com/dong008259/archive/2011/12/07/2279897.html sed是一個很好的文件處理工具,本身是