
三維點雲的地面分割演算法
1.https://www.sohu.com/a/154597666_715754
(“泡泡機器人SLAM”微信公眾號)
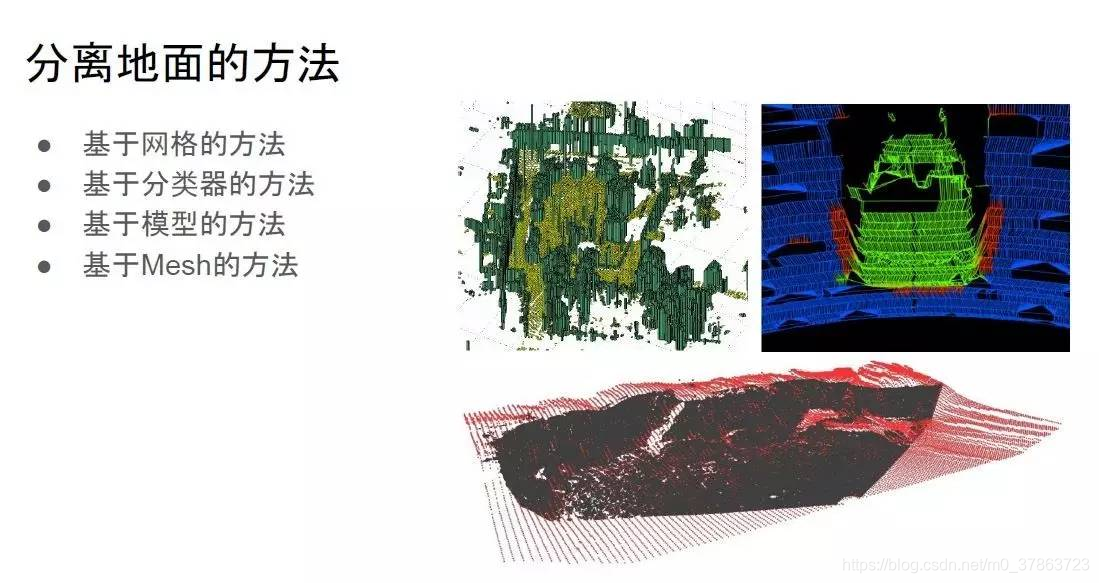
2. 基於改進形態學濾波(Progressive Morphological Filter)的地面點雲分割演算法,這個演算法本身用於處理高空獲取的鐳射雷達資料,把地面與非地面的物體分割,來獲取地貌3d地圖的。參考:https://blog.csdn.net/AmbitiousRuralDog/article/details/80268920
3. Zermas D, Izzat I, Papanikolopoulos N. Fast segmentation of 3D point clouds: A paradigm on LiDAR data for autonomous vehicle applications[C]// IEEE International Conference on Robotics and Automation. IEEE, 2017.
是基於模型(地面平面擬合)的方法,但不同於ransac(隨機抽樣一致)和高斯過程
相關推薦
三維點雲的地面分割演算法
1.https://www.sohu.com/a/154597666_715754 (“泡泡機器人SLAM”微信公眾號) 2. 基於改進形態學濾波(Progressive Morphological Filter)的地面點雲分割演算法,這個演算法本身用於處理高
#讀原始碼+論文# 三維點雲分割Deep Learning Based Semantic Labelling of 3D Point Cloud in Visual SLAM
from Deep Learning Based Semantic Labelling of 3D Point Cloud in Visual SLAM 超體素方法進行預分割,將點雲根據相似性變成表層面片(surface patches)降低計算複雜度。
基於深度學習的三維點雲分類和分割(找了幾篇文章)
https://blog.csdn.net/bflong/article/details/79655200http://www.sohu.com/a/162727821_715754https://www.cnblogs.com/li-yao7758258/p/8182846
3D Registration 三維點雲配準
待讀參考: https://blog.csdn.net/kaspar1992/article/details/54836222 https://www.cnblogs.com/yin52133/archive/2012/07/21/2602562.html https://blog.csdn.net/u
三維點雲資料集
轉載! 三維點雲 幾何空間的三維掃描資料(加紋理)GeometryHub(幾何空間) 歐特克的研究——數字210金歐特克的樣品掃描和影象資料研究辦公室。 自治系統實驗室(乙)鐳射和Kinect結構化和非結構化的資料環境。 這一組有一個有用的相關
【深度學習】三維點雲資料集總結
點雲資料集總結 三維點雲資料,三維深度學習 1.ShapeNet ShapeNet是一個豐富標註的大規模點雲資料集,其中包含了55中常見的物品類別和513000個三維模型。 2.ShapeNetSem 這是一個小的資料庫,包含了270類的12000個物
三維點雲配準
作者:劉緣 連結:https://www.zhihu.com/question/34170804/answer/121533317 來源:知乎 著作權歸作者所有。商業轉載請聯絡作者獲得授權,非商業轉載請註明出處。 本科畢業設計做的點雲配準,對這個方面有一些初步理解,希望有所幫助~
基於深度學習的三維點雲分類的介紹
轉自博主 particle,該文章翻譯自http://www.itzikbs.com/3d-point-cloud-classification-using-deep-learning 在過去的這些年裡,對二維影象已經有了大量深入的研究,並且有著長足的發
從PCL庫看三維點雲依賴的相關知識
第一次使用PCL庫還是2017年,當時為了提取火線(火場包絡線:凹包),因為凸包雖然很簡單,但是不符合實際火場分佈的情況,於是查詢到了PCL可以實現,於是熬了幾個夜,走馬觀花的安裝、測試最終參考程式碼實現了想要的功能,但是PCL真的是連一知半
[硬體]三維點雲資料獲取
A laser mount on a tilting unit. 目前的硬體獲取資料出現了這麼個問題,應該是鐳射沒有安裝好,掃描方向沒有真正沿著鉛錘方向。考慮進行校準。 初步校正了一下,可以差不多看了,不過發現北陽的誤差真的很大啊!北陽激光采集點本身需要運動補償嗎? (PS:點雲資料誤差大的原
用VS+Opencv3.1從雙目立體視差圖中重建三維點雲
基本原理 基本流程 程式碼 本程式碼執行需要在VS上配置好opencv3.1+openNI+PCL,opencv3.1的配置可以在網上找到很多資料,openNI和PCL的配置可以參看上一篇博文下http://blog.csd
VTK 點雲重建和讀取.txt文件顯示三維點雲
點雲重建 vtkSurfaceReconstructionFilter實現了一種隱式曲面重建的方法,即將曲面看作一個符號距離函式的等值面,曲面內外的距離值得符號函式相反,則零等值面即為所求的曲面。該方法需要對點雲資料進行網格劃分,然後估算每個點的切平面和方向,
PCL求取三維點雲模型每點曲率
最近在做有關實驗需要計算模型曲率,但是網上找了一圈也沒找到滿意的資料。最後發現PCL庫可以很方便的求取模型中每一個點的曲率,但是我們要想將PCL庫求得的曲率資料應用到自己的專案中需要將PCL庫與我們的專案進行結合,並且在PCL求出曲率後存放在自己的結構體中,這樣才能得到更適合
三維點雲網絡——PointNet論文解讀
PointNet1 是斯坦福大學研究人員提出的一個點雲處理網路,與先前工作的不同在於這一網路可以直接輸入無序點雲進行處理,而無序將資料處理成規則的3Dvoxel形式進行處理。輸入點雲順序對於網路的輸出結果沒有影響,同時也可以處理旋轉平移後的點雲資料。 點雲是
通過Kinect的深度影象資料計算三維點雲
在可以透過 OpenNI 讀取到 Kinect 的深度、色彩資訊之後,其實就可以試著用這些資訊,來重建 3D 的環境做顯示了~不過實際上,在前面的範例中所讀到的深度資訊,都算是原始資料,而且座標軸也都是感應器二維影像的座標系統,如果要重建 3D 場景的話,這些資訊都還是需要換算的;所幸,OpenNI 在 D
兩種三維點雲密度聚類方法的研究與對比
轉載請說明出處: http://blog.csdn.net/zhubaohua_bupt/article/details/70194047 基於密度的點雲聚類演算法可以識別三維點雲物體,也可以對三維點雲去噪處理。 本文研究了兩種基於密度的點雲聚類方法,先簡單介紹一下兩種演
三維計算機視覺(三)--點雲分割
轉自:http://www.cnblogs.com/ironstark/p/5000147.html 點雲分割 點雲分割可謂點雲處理的精髓,也是三維影象相對二維影象最大優勢的體現。 點雲分割的目的提取點雲中的不同物體,從而實現分而治之,突出重點,單獨處理的目的。而在
PLC 初學三通道點雲的賦值、顯示和儲存
#include <pcl/visualization/cloud_viewer.h> #include <iostream> #include <fstream> #include <pcl/io/io.h> #include
opencv與opengl混用實現三維點雲圖像
/* 灰度圖轉換為高度圖,為雙目視覺三維重建做準備。 */ #include <iostream> #include <stdlib.h> //#include <cv.h> //#include <cxcore.h&g
python3.6 + tensorflow入門:三維點擬合平面
參考連結: http://wiki.jikexueyuan.com/project/tensorflow-zh/get_started/introduction.html 程式碼: # -*- coding: utf-8 -*- """ Created on Fri Dec 21 14: