
關於高通8053平臺i2c和spi配置的學習總結
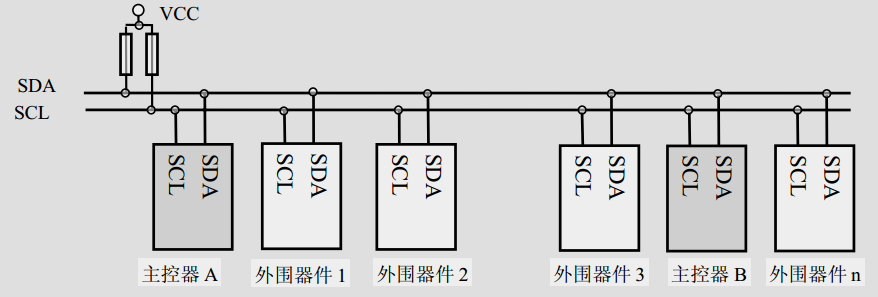 圖 IIC結構示意圖
圖 IIC結構示意圖
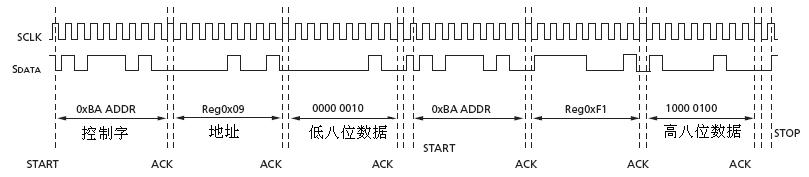 圖 IIC匯流排資料傳輸協議示意圖
spi的四根線:MOSI、MISO、CS、CLK,spi匯流排的結構和資料的傳送格式如下圖所示。分別代表:
MOSI:主輸出,從輸入。
MISO:主輸入,從輸出。
CS:片選。
CLK:同步時鐘。
圖 IIC匯流排資料傳輸協議示意圖
spi的四根線:MOSI、MISO、CS、CLK,spi匯流排的結構和資料的傳送格式如下圖所示。分別代表:
MOSI:主輸出,從輸入。
MISO:主輸入,從輸出。
CS:片選。
CLK:同步時鐘。
圖 spi結構和資料傳送格式示意圖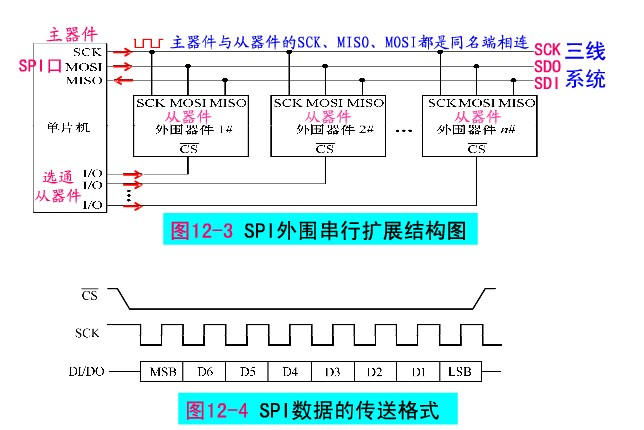
相關推薦
關於高通8053平臺i2c和spi配置的學習總結
這次完成的任務是要使能高通8053平臺的i2c和spi,主要做的工作就是在裝置樹檔案中新增節點資訊。主要的工作在於對裝置樹檔案的修改,主要修改了msm8953-pinctrl.dtsi和msm8953.dtsi兩個檔案。 msm8953-pinctrl.dtsi是配置M
關於qualcomm平臺i2c和spi配置學習
前言: 此篇blog主要是要使能qualcomm平臺的i2c和spi,例如怎麼在裝置樹檔案中新增節點資訊,其次是對裝置樹檔案的改。eg.主要修改了msm8916-pinctrl.dtsi msm891
NET Core的mvc服務彩票開獎網平臺搭建和Route服務學習總結
依然 pen environ fig 數據 builder 特性 ets space mvc服務 和 route服務彩票開獎網平臺搭建論壇:haozbbs.com Q1446595067程序想要 增加 請求的路由服務,則需要 在ConfigureServices 中增加路由
UART、I2C以及SPI協議學習總結
UART(通用非同步收發器)非同步序列通訊 是屬於非同步通訊。所謂的非同步通訊,簡單來講就是不同步,比如計算機發送給微控制器,計算機只負責把資料通過TXD傳送出來即可,接收資料是微控制器自己的事。UART通訊先是一直保持高電平,傳送資料之前有起始位0,而
I2C和SPI總線對比
clas 結束 相對 比較 scl 只有一個 shee 鎖定 因此 1 iic總線不是全雙工,2根線SCL SDA。spi總線實現全雙工,4根線SCK CS MOSI MISO 2 iic總線是多主機總線,通過SDA上的地址信息來鎖定從設備。spi總線只有一個主設備,主設
詳細剖析I2C和SPI通訊協議的區別
原文連結:http://m.elecfans.com/article/610220.html 1. 概述I2C與SPI協議 IIC vs SPI現今,在低端數字通訊應用領域,我們隨處可見IIC (Inter-Integrated Circuit) 和 SPI (Serial
初試:優化高通cpu在MIUI上的配置
前言 當前手機硬體日新月異,在我個人看來,某種程度上手機硬體效能已經過剩,手機的效能反而在於軟體上的優化。比如小米4搭載的高通801這款cpu四核2.5GHZ,效能已經不錯,但是由於MIUI對cpu進行無腦的限頻,均衡模式下,關閉兩個核心,其他兩個核心頻率限制在1036MHz,103
關於I2C和SPI匯流排協議
關於I2C和SPI匯流排協議IICvs SPI 現今,在低端數字通訊應用領域,我們隨處可見IIC (Inter-Integrated Circuit) 和 SPI (Serial Peripheral Interface)的身影。原因是這兩種通訊協議非常適合近
高通SDM845平臺Sensor學習——4.SLPI(SAM Sensor)--
四:Sensor SLPI層SAM Sensor例項分析 上文中,我們大致瞭解了物理sensor driver整個流程,但在專案中,一般寫這種sensor driver的情況很少。這種sensor driver基本上都是各個vendor廠商
高通SDM845平臺Sensor學習——2.Hal層--
二:Sensor Hal層程式碼分析 Hal code放在/vendor/qcom/proprietary/sensors-see/中 sensors-hal資料夾中包含framework和sensors資料夾,為本文重點分析物件
裝置樹之I2C和SPI例項
I2C例項 clock-frequency i2c匯流排頻率,常用值有100000,400000 address-cells 該屬性值必須為1 size-cells 該屬性值必須為0 i2c具體例項如下圖所示:
i2c和spi通訊協議的特點及區別
一、i2c匯流排 i2c是由Philips公司提出的雙線多主機、同步、半雙工、序列低速率、非差分訊號的通訊匯流排。廣泛應用於傳輸速率要求不高、傳輸距離短的場合,最大優勢是可以在總線上擴充套件多個外圍裝置的支援。如soc外部的各外圍裝置與soc之間的通訊,常見的各種物聯網感測
[轉]關於I2C和SPI匯流排協議的優缺點
關於I2C和SPI匯流排協議 IICvs SPI 現今,在低端數字通訊應用領域,我們隨處可見IIC (Inter-Integrated Circuit) 和 SPI (Serial Peripheral Interface)的身影。原
高通Android平臺 OTA差分包的生成方法
1、首先高通平臺的編譯流程與android原生態的編譯流程一樣,需要經歷以下幾步: a. source build/envsetup.sh; b. lunch 選擇專案 c. make -j24 編譯完之後 4.make otapackage
高通8xxx平臺雙MIC設定
dts檔案修改: qcom,audio-routing = "RX_BIAS", "MCLK", "LDO_H", "MCLK", "SPK_OUT", "MCLK", "SPK_OUT", "EXT_VDD_SPKR", "Lineo
高通android平臺功耗優化方法
1、底電流除錯(Rock Bottom Current Optimization) 底電流在手機飛航模式下除錯。每個平臺的底電流資料可能不一樣,具體可以參考release出來的Current Consumption Data文件或者release note。一般情況下的底電流參考資料上限是: 512M
nrf52832用I2C和SPI兩種方式驅動LIS2DS12
本來在這裡寫了些牢騷話,但是想想這是記錄技術文件,還是廢話少說為好 直奔主題 先介紹下LIS2DS12,ST公司出的gsensor,內部自帶mcu ,可以輸出步數、敲擊、翻腕等行為結果,還提供了一個256級的FIFO(可以儲存256組三軸資料),FIFO具有
高通MDM平臺開發入門
原始碼下載 高通MDM平臺程式碼分為兩個部分:高通私有程式碼 以及 開源公有程式碼 針對某一個平臺,高通會提供一條基線,包括了私有程式碼的版本以及公有程式碼每個庫的revision 公有程式碼下載:在基線中有codeaurora相關的repo下載路徑,找到對應的ma
I2C和SPI異同及使用注意
1 iic匯流排不是全雙工,2根線SCL SDA。spi匯流排實現全雙工,4根線SCK CS MOSI MISO 2 iic匯流排是多主機匯流排,通過SDA上的地址資訊來鎖定從裝置。spi匯流排只有一個主裝置,主裝置通過CS片選來確定從裝置 3 iic匯流排傳輸速度在10
高通Android平臺硬體除錯之Camera篇
Camera工作流程圖Camera的成像原理可以簡單概括如下:景物(SCENE)通過鏡頭(LENS)生成的光學影象投射到影象感測器(Sensor)表面上,然後轉為電訊號,經過A/D(模數轉換)轉換後變為數字影象訊號,再送到數字訊號處理晶片(DSP)中加工處理,再通過IO介面傳輸到CPU中處理,通過DISPLA