
Harris角點檢測原理及C++實現
1. 首先,我們不禁要問什麼是harris角點?
對於角點,到目前為止還沒有明確的數學定義。但是你可以認為角點就是極值點,即在某方面屬性特別突出的點。一般的角點檢測都是對有具體定義的、或者是能夠具體檢測出來的興趣點的檢測。這意味著興趣點可以是角點,是在某些屬性上強度最大或者最小的孤立點、線段的終點,或者是曲線上局部曲率最大的點。
通俗的來說,在一副影象中,我們可以認為角點是物體輪廓線的連線點(見圖1),當拍攝視角變化的時候,這些特徵點仍能很好地保持穩定的屬性。
圖1 corner
角點在保留影象圖形重要特徵的同時,可以有效地減少資訊的資料量,使其資訊的含量很高,有效地提高了計算的速度,有利於影象的可靠匹配,使得實時處理成為可能。它的各種應用,這裡我就不再贅述了。
2. 如何檢測出harris角點?

圖2 角點檢測的基本思想
角點檢測最原始的想法就是取某個畫素的一個鄰域視窗,當這個視窗在各個方向上進行小範圍移動時,觀察視窗內平均的畫素灰度值的變化(即,E(u,v),Window-averaged change of intensity)。從上圖可知,我們可以將一幅影象大致分為三個區域(‘flat’,‘edge’,‘corner’),這三個區域變化是不一樣的。

其中,u,v是視窗在水平,豎直方向的偏移,

這裡可以先簡單複習一下泰勒級數展開的知識,因為馬上就用到啦,

這是一維的情況,對於多元函式,也有類似的泰勒公式。
對I(x+u,y+v)進行二維泰勒級數展開,我們取一階近似,有

圖中藍線圈出的部分我們稱之為結構張量(structure tensor),用M表示。
講到這裡,先明確一點,我們的目的是什麼?我們的目的是尋找這樣的畫素點,它使得我們的u,v無論怎樣取值,E(u,v)都是變化比較大的,這個畫素點就是我們要找的角點。不難觀察,上式近似處理後的E(u,v)是一個二次型,而由下述定理可知,

令E(u,v)=常數,我們可用一個橢圓來描繪這一函式。
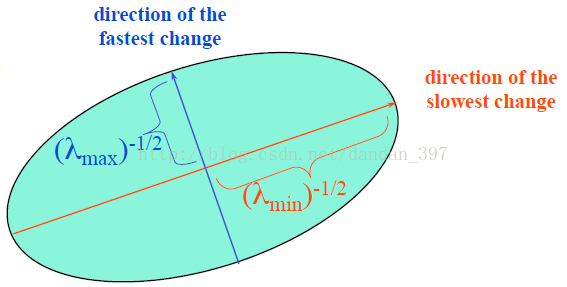
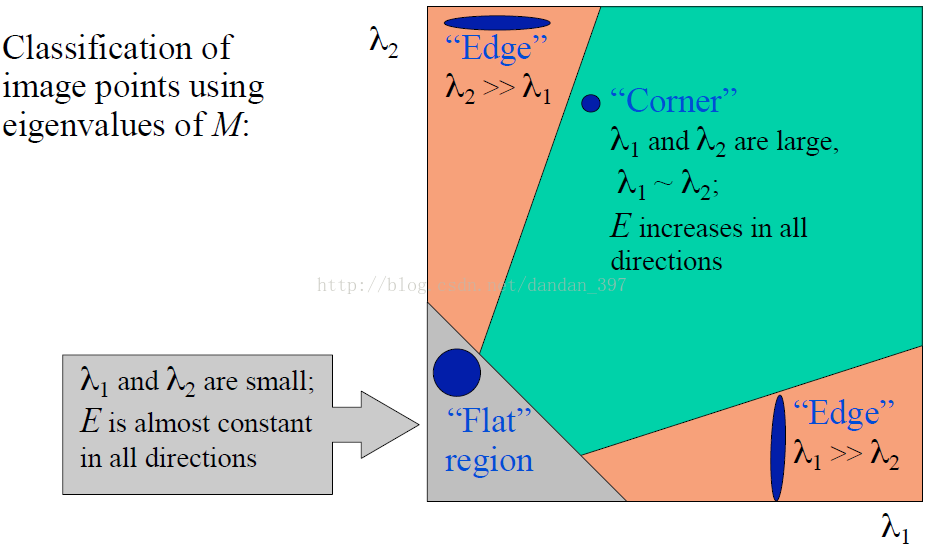
橢圓的長短軸是與結構張量M的兩個特徵值相對應的量。通過判斷
的情況我們就可以區分出‘flat’,‘edge’,‘corner’這三種區域,因為最直觀的印象:
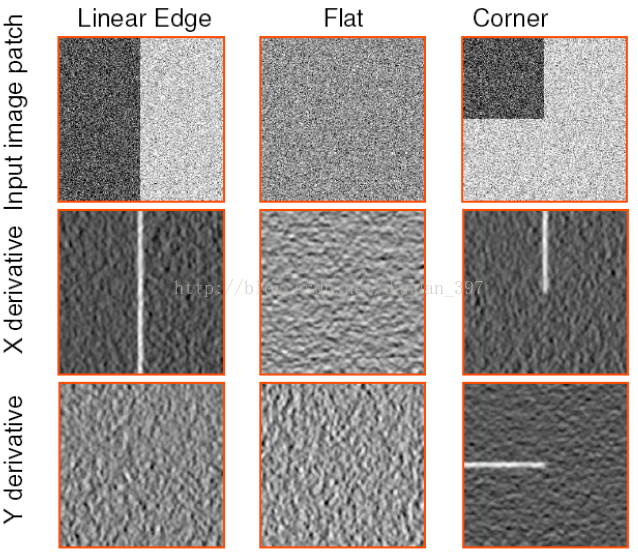
corner:在水平、豎直兩個方向上變化均較大的點,即Ix、Iy都較大;
edge :僅在水平、或者僅在豎直方向有較大的點,即Ix和Iy只有其一較大 ;
flat : 在水平、豎直方向的變化量均較小的點,即Ix、Iy都較小;
而結構張量M是由Ix,Iy構成,它的特徵值正好可以反映Ix,Iy的情況,下面我以一種更容易理解的方式來講述橢圓的物理意義。

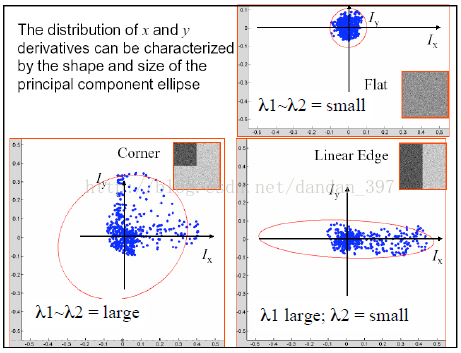
這樣是不是更清楚了呢^_^......,因此我們可以得出結論:
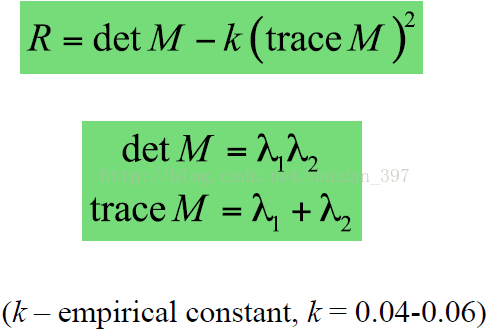
當然,大牛們並沒有止步於此,這樣通過判斷兩個變數的值來判斷角點畢竟不是很方便。於是他們想出了一種更好的方法,對,就是定義角點響應函式R(corner response function),
針對三種區域,R的取值如何呢?

至此,我們就可以通過判斷R的值來判斷某個點是不是角點了。
角點:R為大數值整數
邊緣:R為大數值負數
平坦區:絕對值R是小數值
3. harris角點檢測演算法步驟
1.利用Soble計算出XY方向的梯度值
2.計算出Ix^2,Iy^2,Ix*Iy
3.利用高斯函式對Ix^2,Iy^2,Ix*Iy進行濾波
4.計算區域性特徵結果矩陣M的特徵值和響應函式C(i,j)=Det(M)-k(trace(M))^2 (0.04<=k<=0.06)
5.將計算出響應函式的值C進行非極大值抑制,濾除一些不是角點的點,同時要滿足大於設定的閾值
下面放上原始碼:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <cmath>
using namespace cv;
using namespace std;
/*
RGB轉換成灰度影象的一個常用公式是:
Gray = R*0.299 + G*0.587 + B*0.114
*/
//******************灰度轉換函式*************************
//第一個引數image輸入的彩色RGB影象的引用;
//第二個引數imageGray是轉換後輸出的灰度影象的引用;
//*******************************************************
void ConvertRGB2GRAY(const Mat &image, Mat &imageGray);
//******************Sobel卷積因子計算X、Y方向梯度和梯度方向角********************
//第一個引數imageSourc原始灰度影象;
//第二個引數imageSobelX是X方向梯度影象;
//第三個引數imageSobelY是Y方向梯度影象;
//第四個引數pointDrection是梯度方向角陣列指標
//*************************************************************
void SobelGradDirction(Mat &imageSource, Mat &imageSobelX, Mat &imageSobelY);
//******************計算Sobel的X方向梯度幅值的平方*************************
//第一個引數imageGradX是X方向梯度影象;
//第二個引數SobelAmpXX是輸出的X方向梯度影象的平方
//*************************************************************
void SobelXX(const Mat imageGradX, Mat_<float> &SobelAmpXX);
//******************計算Sobel的Y方向梯度幅值的平方*************************
//第一個引數imageGradY是Y方向梯度影象;
//第二個引數SobelAmpXX是輸出的Y方向梯度影象的平方
//*************************************************************
void SobelYY(const Mat imageGradY, Mat_<float> &SobelAmpYY);
//******************計算Sobel的XY方向梯度幅值的乘積*************************
//第一個引數imageGradX是X方向梯度影象;
//第二個引數imageGradY是Y方向梯度影象;
//第二個引數SobelAmpXY是輸出的XY方向梯度影象
//*************************************************************
void SobelXY(const Mat imageGradX, const Mat imageGradY, Mat_<float> &SobelAmpXY);
//****************計算一維高斯的權值陣列*****************
//第一個引數size是代表的卷積核的邊長的大小
//第二個引數sigma表示的是sigma的大小
//*******************************************************
double *getOneGuassionArray(int size, double sigma);
//****************高斯濾波函式的實現*****************
//第一個引數srcImage是代表的輸入的原圖
//第二個引數dst表示的是輸出的圖
//第三個引數size表示的是卷積核的邊長的大小
//*******************************************************
void MyGaussianBlur(Mat_<float> &srcImage, Mat_<float> &dst, int size);
//****計算區域性特漲結果矩陣M的特徵值和響應函式H = (A*B - C) - k*(A+B)^2******
//M
//A C
//C B
//Tr(M)=a+b=A+B
//Det(M)=a*b=A*B-C^2
//計算輸出響應函式的值得矩陣
//****************************************************************************
void harrisResponse(Mat_<float> &GaussXX, Mat_<float> &GaussYY, Mat_<float> &GaussXY, Mat_<float> &resultData,float k);
//***********非極大值抑制和滿足閾值及某鄰域內的區域性極大值為角點**************
//第一個引數是響應函式的矩陣
//第二個引數是輸入的灰度影象
//第三個引數表示的是輸出的角點檢測到的結果圖
void LocalMaxValue(Mat_<float> &resultData, Mat &srcGray, Mat &ResultImage,int kSize);
int main()
{
const Mat srcImage = imread("3.jpg");
if (!srcImage.data)
{
printf("could not load image...\n");
return -1;
}
imshow("srcImage", srcImage);
Mat srcGray;
ConvertRGB2GRAY(srcImage, srcGray);
Mat imageSobelX;
Mat imageSobelY;
Mat resultImage;
Mat_<float> imageSobelXX;
Mat_<float> imageSobelYY;
Mat_<float> imageSobelXY;
Mat_<float> GaussianXX;
Mat_<float> GaussianYY;
Mat_<float> GaussianXY;
Mat_<float> HarrisRespond;
//計算Soble的XY梯度
SobelGradDirction(srcGray, imageSobelX, imageSobelY);
//計算X方向的梯度的平方
SobelXX(imageSobelX, imageSobelXX);
SobelYY(imageSobelY, imageSobelYY);
SobelXY(imageSobelX, imageSobelY, imageSobelXY);
//計算高斯模糊XX YY XY
MyGaussianBlur(imageSobelXX, GaussianXX,3);
MyGaussianBlur(imageSobelYY, GaussianYY, 3);
MyGaussianBlur(imageSobelXY, GaussianXY, 3);
harrisResponse(GaussianXX, GaussianYY, GaussianXY, HarrisRespond, 0.05);
LocalMaxValue(HarrisRespond, srcGray, resultImage, 3);
imshow("imageSobelX", imageSobelX);
imshow("imageSobelY", imageSobelY);
imshow("resultImage", resultImage);
waitKey(0);
return 0;
}
void ConvertRGB2GRAY(const Mat &image, Mat &imageGray)
{
if (!image.data || image.channels() != 3)
{
return;
}
//建立一張單通道的灰度影象
imageGray = Mat::zeros(image.size(), CV_8UC1);
//取出儲存影象畫素的陣列的指標
uchar *pointImage = image.data;
uchar *pointImageGray = imageGray.data;
//取出影象每行所佔的位元組數
size_t stepImage = image.step;
size_t stepImageGray = imageGray.step;
for (int i = 0; i < imageGray.rows; i++)
{
for (int j = 0; j < imageGray.cols; j++)
{
pointImageGray[i*stepImageGray + j] = (uchar)(0.114*pointImage[i*stepImage + 3 * j] + 0.587*pointImage[i*stepImage + 3 * j + 1] + 0.299*pointImage[i*stepImage + 3 * j + 2]);
}
}
}
//儲存梯度膜長
void SobelGradDirction(Mat &imageSource, Mat &imageSobelX, Mat &imageSobelY)
{
imageSobelX = Mat::zeros(imageSource.size(), CV_32SC1);
imageSobelY = Mat::zeros(imageSource.size(), CV_32SC1);
//取出原圖和X和Y梯度圖的陣列的首地址
uchar *P = imageSource.data;
uchar *PX = imageSobelX.data;
uchar *PY = imageSobelY.data;
//取出每行所佔據的位元組數
int step = imageSource.step;
int stepXY = imageSobelX.step;
int index = 0;//梯度方向角的索引
for (int i = 1; i < imageSource.rows - 1; ++i)
{
for (int j = 1; j < imageSource.cols - 1; ++j)
{
//通過指標遍歷影象上每一個畫素
double gradY = P[(i + 1)*step + j - 1] + P[(i + 1)*step + j] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[(i - 1)*step + j] * 2 - P[(i - 1)*step + j + 1];
PY[i*stepXY + j*(stepXY / step)] = abs(gradY);
double gradX = P[(i - 1)*step + j + 1] + P[i*step + j + 1] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[i*step + j - 1] * 2 - P[(i + 1)*step + j - 1];
PX[i*stepXY + j*(stepXY / step)] = abs(gradX);
}
}
//將梯度陣列轉換成8位無符號整型
convertScaleAbs(imageSobelX, imageSobelX);
convertScaleAbs(imageSobelY, imageSobelY);
}
void SobelXX(const Mat imageGradX, Mat_<float> &SobelAmpXX)
{
SobelAmpXX = Mat_<float>(imageGradX.size(), CV_32FC1);
for (int i = 0; i < SobelAmpXX.rows; i++)
{
for (int j = 0; j < SobelAmpXX.cols; j++)
{
SobelAmpXX.at<float>(i, j) = imageGradX.at<uchar>(i, j)*imageGradX.at<uchar>(i, j);
}
}
//convertScaleAbs(SobelAmpXX, SobelAmpXX);
}
void SobelYY(const Mat imageGradY, Mat_<float> &SobelAmpYY)
{
SobelAmpYY = Mat_<float>(imageGradY.size(), CV_32FC1);
for (int i = 0; i < SobelAmpYY.rows; i++)
{
for (int j = 0; j < SobelAmpYY.cols; j++)
{
SobelAmpYY.at<float>(i, j) = imageGradY.at<uchar>(i, j)*imageGradY.at<uchar>(i, j);
}
}
//convertScaleAbs(SobelAmpYY, SobelAmpYY);
}
void SobelXY(const Mat imageGradX, const Mat imageGradY, Mat_<float> &SobelAmpXY)
{
SobelAmpXY = Mat_<float>(imageGradX.size(), CV_32FC1);
for (int i = 0; i < SobelAmpXY.rows; i++)
{
for (int j = 0; j < SobelAmpXY.cols; j++)
{
SobelAmpXY.at<float>(i, j) = imageGradX.at<uchar>(i, j)*imageGradY.at<uchar>(i, j);
}
}
//convertScaleAbs(SobelAmpXY, SobelAmpXY);
}
//計算一維高斯的權值陣列
double *getOneGuassionArray(int size, double sigma)
{
double sum = 0.0;
//定義高斯核半徑
int kerR = size / 2;
//建立一個size大小的動態一維陣列
double *arr = new double[size];
for (int i = 0; i < size; i++)
{
// 高斯函式前的常數可以不用計算,會在歸一化的過程中給消去
arr[i] = exp(-((i - kerR)*(i - kerR)) / (2 * sigma*sigma));
sum += arr[i];//將所有的值進行相加
}
//進行歸一化
for (int i = 0; i < size; i++)
{
arr[i] /= sum;
cout << arr[i] << endl;
}
return arr;
}
void MyGaussianBlur(Mat_<float> &srcImage, Mat_<float> &dst, int size)
{
CV_Assert(srcImage.channels() == 1 || srcImage.channels() == 3); // 只處理單通道或者三通道影象
int kerR = size / 2;
dst = srcImage.clone();
int channels = dst.channels();
double* arr;
arr = getOneGuassionArray(size, 1);//先求出高斯陣列
//遍歷影象 水平方向的卷積
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
float GuassionSum[3] = { 0 };
//滑窗搜尋完成高斯核平滑
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)//如果只是單通道
{
GuassionSum[0] += arr[kerR + k] * dst.at<float>(i, j + k);//行不變,列變換,先做水平方向的卷積
}
else if (channels == 3)//如果是三通道的情況
{
Vec3f bgr = dst.at<Vec3f>(i, j + k);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<float>(i, j) = static_cast<float>(GuassionSum[0]);
else if (channels == 3)
{
Vec3f bgr = { static_cast<float>(GuassionSum[0]), static_cast<float>(GuassionSum[1]), static_cast<float>(GuassionSum[2]) };
dst.at<Vec3f>(i, j) = bgr;
}
}
}
//豎直方向
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
float GuassionSum[3] = { 0 };
//滑窗搜尋完成高斯核平滑
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)//如果只是單通道
{
GuassionSum[0] += arr[kerR + k] * dst.at<float>(i + k, j);//行變,列不換,再做豎直方向的卷積
}
else if (channels == 3)//如果是三通道的情況
{
Vec3f bgr = dst.at<Vec3f>(i + k, j);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<float>(i, j) = static_cast<float>(GuassionSum[0]);
else if (channels == 3)
{
Vec3f bgr = { static_cast<float>(GuassionSum[0]), static_cast<float>(GuassionSum[1]), static_cast<float>(GuassionSum[2]) };
dst.at<Vec3f>(i, j) = bgr;
}
}
}
delete[] arr;
}
void harrisResponse(Mat_<float> &GaussXX, Mat_<float> &GaussYY, Mat_<float> &GaussXY, Mat_<float> &resultData,float k)
{
//建立一張響應函式輸出的矩陣
resultData = Mat_<float>(GaussXX.size(), CV_32FC1);
for (int i = 0; i < resultData.rows; i++)
{
for (int j = 0; j < resultData.cols; j++)
{
float a = GaussXX.at<float>(i, j);
float b = GaussYY.at<float>(i, j);
float c = GaussXY.at<float>(i, j);
resultData.at<float>(i, j) = a*b - c*c - k*(a + b)*(a + b);
}
}
}
//非極大值抑制
void LocalMaxValue(Mat_<float> &resultData, Mat &srcGray, Mat &ResultImage, int kSize)
{
int r = kSize / 2;
ResultImage = srcGray.clone();
for (int i = r; i < ResultImage.rows - r; i++)
{
for (int j = r; j < ResultImage.cols - r; j++)
{
if (resultData.at<float>(i, j) > resultData.at<float>(i - 1, j - 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i - 1, j) &&
resultData.at<float>(i, j) > resultData.at<float>(i - 1, j - 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i - 1, j + 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i, j - 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i, j + 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i + 1, j - 1) &&
resultData.at<float>(i, j) > resultData.at<float>(i + 1, j) &&
resultData.at<float>(i, j) > resultData.at<float>(i + 1, j + 1))
{
if ((int)resultData.at<float>(i, j) > 18000)
{
circle(ResultImage, Point(i, j), 5, Scalar(0,0,255), 2, 8, 0);
}
}
}
}
}