Canny邊緣檢測原理及C++實現
從11.21開始寫部落格,到今天一個多月了,寫了20多篇了,希望自己能堅持下去吧!
在這裡祝大家聖誕節快樂!
Canny邊緣檢測演算法是澳大利亞科學家John F. Canny在1986年提出來的,不得不提一下的是當年John Canny本人才28歲!到今天已經30年過去了,Canny演算法仍然是影象邊緣檢測演算法中最經典、有效的演算法之一。
一起睹一下大家Canny的風采:
John Canny研究了最優邊緣檢測方法所需的特性,給出了評價邊緣檢測效能優劣的3個指標:
- 1 好的信噪比,即將非邊緣點判定為邊緣點的概率要低,將邊緣點判為非邊緣點的概率要低;
- 2 高的定位效能,即檢測出的邊緣點要儘可能在實際邊緣的中心;
- 3 對單一邊緣僅有唯一響應,即單個邊緣產生多個響應的概率要低,並且虛假響應邊緣應該得到最大抑制;
Canny運算元邊緣檢測的具體步驟如下:
1. 彩色影象轉換為灰度影象2.對影象進行高斯模糊
3. 計算影象梯度,根據梯度計算影象邊緣幅值與角度
4. 非極大值抑制(邊緣細化)
5. 雙閾值處理
6. 雙閾值中間畫素處理及邊緣連結
下面詳解各部分的程式碼:
1. 彩色影象轉灰度影象
根據彩色影象RGB轉灰度公式:gray = R * 0.299 + G * 0.587 + B * 0.114
將彩色影象中每個RGB畫素轉為灰度值的程式碼如下:
C++程式碼實現起來也比較簡單,注意一般情況下影象處理中彩色影象各分量的排列順序是B、G、Rvoid ConvertRGB2GRAY(const Mat &image, Mat &imageGray) { if (!image.data || image.channels() != 3) { return; } imageGray = Mat::zeros(image.size(), CV_8UC1); uchar *pointImage = image.data; uchar *pointImageGray = imageGray.data; size_t stepImage = image.step; size_t stepImageGray = imageGray.step; for (int i = 0; i < imageGray.rows; i++) { for (int j = 0; j < imageGray.cols; j++) { pointImageGray[i*stepImageGray + j] = (uchar)(0.114*pointImage[i*stepImage + 3 * j] + 0.587*pointImage[i*stepImage + 3 * j + 1] + 0.299*pointImage[i*stepImage + 3 * j + 2]); } } }
2.對影象進行高斯模糊
關於高斯更加詳細的解釋看這裡:http://blog.csdn.net/linqianbi/article/details/78635941
//計算一維高斯的權值陣列
double *getOneGuassionArray(int size, double sigma)
{
double sum = 0.0;
int kerR = size / 2;
double *arr = new double[size];
for (int i = 0; i < size; i++)
{
arr[i] = exp(-((i - kerR)*(i - kerR)) / (2 * sigma*sigma));
sum += arr[i];
}
for (int i = 0; i < size; i++)
{
arr[i] /= sum;
cout << arr[i] << endl;
}
return arr;
}
void MyGaussianBlur(Mat &srcImage, Mat &dst, int size)
{
CV_Assert(srcImage.channels() == 1 || srcImage.channels() == 3);
int kerR = size / 2;
dst = srcImage.clone();
int channels = dst.channels();
double* arr;
arr = getOneGuassionArray(size, 1);//先求出高斯陣列
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
double GuassionSum[3] = { 0 };
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)
{
GuassionSum[0] += arr[kerR + k] * dst.at<uchar>(i, j + k);
else if (channels == 3)
{
Vec3b bgr = dst.at<Vec3b>(i, j + k);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(GuassionSum[0]);
else if (channels == 3)
{
Vec3b bgr = { static_cast<uchar>(GuassionSum[0]), static_cast<uchar>(GuassionSum[1]), static_cast<uchar>(GuassionSum[2]) };
dst.at<Vec3b>(i, j) = bgr;
}
}
}
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
double GuassionSum[3] = { 0 };
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)
{
GuassionSum[0] += arr[kerR + k] * dst.at<uchar>(i + k, j);
}
else if (channels == 3)
{
Vec3b bgr = dst.at<Vec3b>(i + k, j);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(GuassionSum[0]);
else if (channels == 3)
{
Vec3b bgr = { static_cast<uchar>(GuassionSum[0]), static_cast<uchar>(GuassionSum[1]), static_cast<uchar>(GuassionSum[2]) };
dst.at<Vec3b>(i, j) = bgr;
}
}
}
delete[] arr;
}3. 計算影象梯度,根據梯度計算影象邊緣幅值與角度
關於Soble的詳細解釋看這裡:http://blog.csdn.net/linqianbi/article/details/78673903//儲存梯度膜長與梯度角
void SobelGradDirction(Mat &imageSource, Mat &imageSobelX, Mat &imageSobelY, double *&pointDrection)
{
pointDrection = new double[(imageSource.rows - 2)*(imageSource.cols - 2)];
for (int i = 0; i < (imageSource.rows - 2)*(imageSource.cols - 2); i++)
{
pointDrection[i] = 0;
}
imageSobelX = Mat::zeros(imageSource.size(), CV_32SC1);
imageSobelY = Mat::zeros(imageSource.size(), CV_32SC1);
uchar *P = imageSource.data;
uchar *PX = imageSobelX.data;
uchar *PY = imageSobelY.data;
int step = imageSource.step;
int stepXY = imageSobelX.step;
int index = 0;
for (int i = 1; i < imageSource.rows - 1; ++i)
{
for (int j = 1; j < imageSource.cols - 1; ++j)
{
double gradY = P[(i + 1)*step + j - 1] + P[(i + 1)*step + j] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[(i - 1)*step + j] * 2 - P[(i - 1)*step + j + 1];
PY[i*stepXY + j*(stepXY / step)] = abs(gradY);
double gradX = P[(i - 1)*step + j + 1] + P[i*step + j + 1] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[i*step + j - 1] * 2 - P[(i + 1)*step + j - 1];
PX[i*stepXY + j*(stepXY / step)] = abs(gradX);
if (gradX == 0)
{
gradX = 0.00000000000000001;
}
pointDrection[index] = (atan(gradY / gradX)*180)/CV_PI;
pointDrection[index] += 90;
index++;
}
}
convertScaleAbs(imageSobelX, imageSobelX);
convertScaleAbs(imageSobelY, imageSobelY);
}求梯度圖的幅值
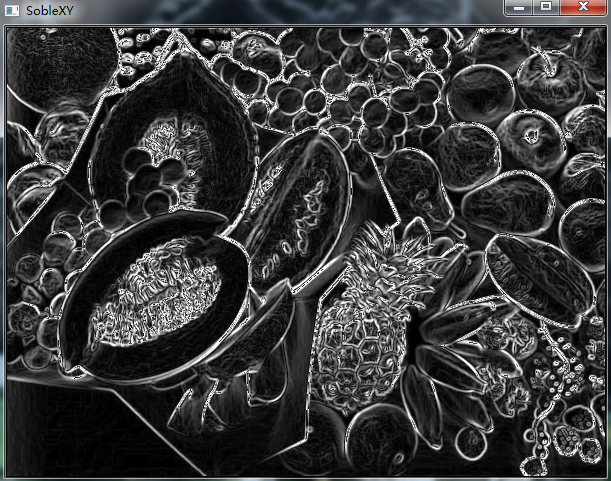
求得X、Y方向的梯度和梯度角之後再來計算X和Y方向融合的梯度幅值,計算公式為:

void SobelAmplitude(const Mat imageGradX, const Mat imageGradY, Mat &SobelAmpXY)
{
SobelAmpXY = Mat::zeros(imageGradX.size(), CV_32FC1);
for (int i = 0; i < SobelAmpXY.rows; i++)
{
for (int j = 0; j < SobelAmpXY.cols; j++)
{
SobelAmpXY.at<float>(i,j)= sqrt(imageGradX.at<uchar>(i, j)*imageGradX.at<uchar>(i, j) + imageGradY.at<uchar>(i, j)*imageGradY.at<uchar>(i, j));
}
}
convertScaleAbs(SobelAmpXY, SobelAmpXY);
}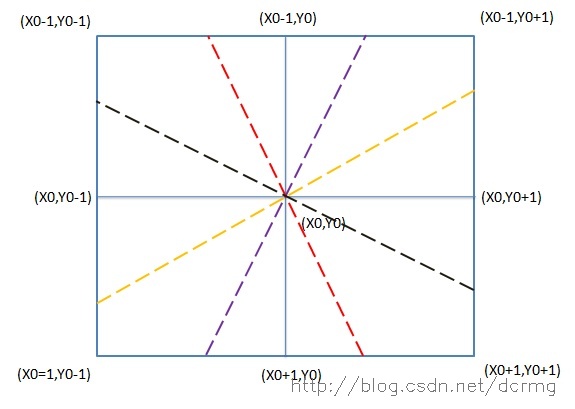
圖中四條虛線代表影象中每一點可能的梯度方向,沿著梯度方向與邊界的上下兩個交點,就是需要拿來與中心點點(X0,Y0)做比較的點。交點值的計算採用插值法計算,以黃色的虛線所代表的梯度角Θ為例,右上角交點處幅值為: (1-tanΘ)P(X0-1,Y0+1)+P(X0,Y0+1)*tanΘ=P(X0-1,Y0+1)+tanΘ*(P(X0,Y0+1)-P(X0-1,Y0+1)) 四種情況下需要分別計算,程式碼如下:
//非極大值抑制,採用插值法,計算插值點的畫素值
void LocalMaxValue(const Mat imageInput, Mat &imageOutput, double *pointDrection)
{
//複製一張輸出的影象
imageOutput = imageInput.clone();
int k = 0;
for (int i = 1; i < imageInput.rows - 1; i++)
{
for (int j = 1; j < imageInput.cols - 1; j++)
{
/*
value00 value01 value02
value10 value11 value12
value20 value21 value22
*/
//求出每個點的畫素值
int value00 = imageInput.at<uchar>(i - 1, j - 1);
int value01 = imageInput.at<uchar>(i - 1, j);
int value02 = imageInput.at<uchar>(i - 1, j + 1);
int value10 = imageInput.at<uchar>(i , j - 1);
int value11 = imageInput.at<uchar>(i , j);
int value12 = imageInput.at<uchar>(i , j + 1);
int value20 = imageInput.at<uchar>(i + 1, j - 1);
int value21 = imageInput.at<uchar>(i + 1, j);
int value22 = imageInput.at<uchar>(i + 1, j + 1);
//如果梯度角在[0,45]度之間的話
if (pointDrection[k] > 0 && pointDrection[k] <= 45)
{
if ((value11 <= (value12 + (value02 - value12)*tan(pointDrection[k]))) || (value11 <= (value10 + (value20 - value10)*tan(pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[45,90]度之間的話
if (pointDrection[k] > 45 && pointDrection[k] <= 90)
{
if ((value11 <= (value01 + (value02 - value01)*tan(pointDrection[k]))) || (value11 <= (value21 + (value20 - value21)*tan(pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[90,135]度之間的話
if (pointDrection[k] > 90 && pointDrection[k] <= 135)
{
if ((value11 <= (value01 + (value00 - value01)*tan(180-pointDrection[k]))) || (value11 <= (value21 + (value22 - value21)*tan(180-pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[135,180]度之間的話
if (pointDrection[k] > 135 && pointDrection[k] <= 180)
{
if ((value11 <= (value10 + (value00 - value10)*tan(180 - pointDrection[k]))) || (value11 <= (value12 + (value22 - value12)*tan(180 - pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
k++;
}
}
}5. 雙閾值處理
雙閾值的機理是:
指定一個低閾值A,一個高閾值B,一般取B為影象整體灰度級分佈的70%,且B為1.5到2倍大小的A;
灰度值大於B的,置為255,灰度值小於A的,置為0;
灰度值介於A和B之間的,考察改畫素點臨近的8畫素是否有灰度值為255的,若沒有255的,表示這是一個孤立的區域性極大值點,予以排除,置為0;若有255的,表示這是一個跟其他邊緣有“接壤”的可造之材,置為255,之後重複執行該步驟,直到考察完之後一個畫素點。
實現的程式碼如下:
void DoubleThreshold(Mat &imageIput, double lowThreshold, double highThreshold)
{
for (int i = 0; i < imageIput.rows; i++)
{
for (int j = 0; j < imageIput.cols; j++)
{
if (imageIput.at<uchar>(i, j) > highThreshold)
{
imageIput.at<uchar>(i, j) = 255;
}
if (imageIput.at<uchar>(i, j) < lowThreshold)
{
imageIput.at<uchar>(i, j) = 0;
}
}
}
}6. 雙閾值中間畫素處理及邊緣連結
void DoubleThresholdLink(Mat &imageInput, double lowThreshold, double highThreshold)
{
for (int i = 1; i < imageInput.rows - 1; i++)
{
for (int j = 1; j < imageInput.cols - 1; j++)
{
//處理在高低閾值之間的畫素的點
if (imageInput.at<uchar>(i, j) > lowThreshold && imageInput.at<uchar>(i, j) < 255)
{
if (imageInput.at<uchar>(i - 1, j - 1) == 255 || imageInput.at<uchar>(i - 1, j) == 255
|| imageInput.at<uchar>(i - 1, j + 1) == 255 || imageInput.at<uchar>(i, j - 1) == 255
|| imageInput.at<uchar>(i, j + 1) == 255 || imageInput.at<uchar>(i + 1, j - 1) == 255
|| imageInput.at<uchar>(i + 1, j) == 255 || imageInput.at<uchar>(i + 1, j + 1) == 255)
{
imageInput.at<uchar>(i, j) = 255;
DoubleThresholdLink(imageInput, lowThreshold, highThreshold);//遞迴呼叫雙閾值連結函式進行連結
}
else
{
imageInput.at<uchar>(i, j) = 0;
}
}
}
}
}經過這幾個步驟Canny邊緣檢測的程式碼就寫完了。
下面放上完整的C++程式碼:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <cmath>
using namespace cv;
using namespace std;
/*
RGB轉換成灰度影象的一個常用公式是:
Gray = R*0.299 + G*0.587 + B*0.114
*/
//******************灰度轉換函式*************************
//第一個引數image輸入的彩色RGB影象的引用;
//第二個引數imageGray是轉換後輸出的灰度影象的引用;
//*******************************************************
void ConvertRGB2GRAY(const Mat &image, Mat &imageGray);
//****************計算一維高斯的權值陣列*****************
//第一個引數size是代表的卷積核的邊長的大小
//第二個引數sigma表示的是sigma的大小
//*******************************************************
double *getOneGuassionArray(int size, double sigma);
//****************高斯濾波函式的實現*****************
//第一個引數srcImage是代表的輸入的原圖
//第二個引數dst表示的是輸出的圖
//第三個引數size表示的是卷積核的邊長的大小
//*******************************************************
void MyGaussianBlur(Mat &srcImage, Mat &dst, int size);
//******************Sobel卷積因子計算X、Y方向梯度和梯度方向角********************
//第一個引數imageSourc原始灰度影象;
//第二個引數imageSobelX是X方向梯度影象;
//第三個引數imageSobelY是Y方向梯度影象;
//第四個引數pointDrection是梯度方向角陣列指標
//*************************************************************
void SobelGradDirction(Mat &imageSource, Mat &imageSobelX, Mat &imageSobelY, double *&pointDrection);
//******************計算Sobel的X和Y方向梯度幅值*************************
//第一個引數imageGradX是X方向梯度影象;
//第二個引數imageGradY是Y方向梯度影象;
//第三個引數SobelAmpXY是輸出的X、Y方向梯度影象幅值
//*************************************************************
void SobelAmplitude(const Mat imageGradX, const Mat imageGradY, Mat &SobelAmpXY);
//******************區域性極大值抑制*************************
//第一個引數imageInput輸入的Sobel梯度影象;
//第二個引數imageOutPut是輸出的區域性極大值抑制影象;
//第三個引數pointDrection是影象上每個點的梯度方向陣列指標
//*************************************************************
void LocalMaxValue(const Mat imageInput, Mat &imageOutput, double *pointDrection);
//******************雙閾值處理*************************
//第一個引數imageInput輸入和輸出的的Sobel梯度幅值影象;
//第二個引數lowThreshold是低閾值
//第三個引數highThreshold是高閾值
//******************************************************
void DoubleThreshold(Mat &imageIput, double lowThreshold, double highThreshold);
//******************雙閾值中間畫素連線處理*********************
//第一個引數imageInput輸入和輸出的的Sobel梯度幅值影象;
//第二個引數lowThreshold是低閾值
//第三個引數highThreshold是高閾值
//*************************************************************
void DoubleThresholdLink(Mat &imageInput, double lowThreshold, double highThreshold);
int main()
{
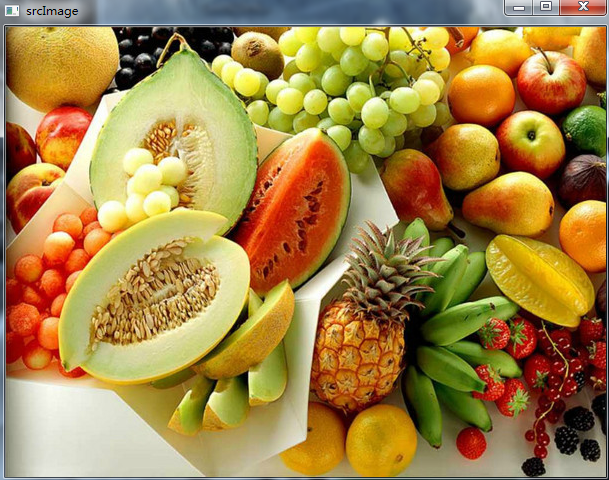
const Mat srcImage = imread("1.jpg");
if (!srcImage.data)
{
printf("could not load image...\n");
return -1;
}
imshow("srcImage", srcImage);
Mat srcGray;
ConvertRGB2GRAY(srcImage, srcGray);
Mat GaussianRes;
MyGaussianBlur(srcGray, GaussianRes, 3);
Mat imageSobelX;
Mat imageSobelY;
double *pointDirection = new double[(GaussianRes.cols - 2)*(GaussianRes.rows - 2)]; //定義梯度方向角陣列
SobelGradDirction(GaussianRes, imageSobelX, imageSobelY, pointDirection); //計算X、Y方向梯度和方向角
Mat imageSobleXY;
SobelAmplitude(imageSobelX, imageSobelY, imageSobleXY);
Mat localMaxImage;
LocalMaxValue(imageSobleXY, localMaxImage, pointDirection);
imshow("Non-Maximum Image", localMaxImage);
DoubleThreshold(localMaxImage, 60, 100);
imshow("DoubleThr", localMaxImage);
DoubleThresholdLink(localMaxImage, 60, 100);
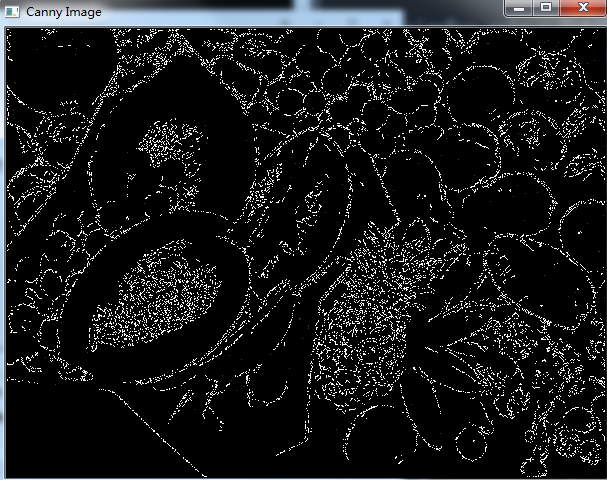
imshow("Canny Image", localMaxImage);
imshow("srcGray", srcGray);
imshow("GaussianRes", GaussianRes);
imshow("SobleX", imageSobelX);
imshow("SobleY", imageSobelY);
imshow("SobleXY", imageSobleXY);
waitKey(0);
return 0;
}
void ConvertRGB2GRAY(const Mat &image, Mat &imageGray)
{
if (!image.data || image.channels() != 3)
{
return;
}
imageGray = Mat::zeros(image.size(), CV_8UC1);
uchar *pointImage = image.data;
uchar *pointImageGray = imageGray.data;
size_t stepImage = image.step;
size_t stepImageGray = imageGray.step;
for (int i = 0; i < imageGray.rows; i++)
{
for (int j = 0; j < imageGray.cols; j++)
{
pointImageGray[i*stepImageGray + j] = (uchar)(0.114*pointImage[i*stepImage + 3 * j] + 0.587*pointImage[i*stepImage + 3 * j + 1] + 0.299*pointImage[i*stepImage + 3 * j + 2]);
}
}
}
double *getOneGuassionArray(int size, double sigma)
{
double sum = 0.0;
int kerR = size / 2;
double *arr = new double[size];
for (int i = 0; i < size; i++)
{
arr[i] = exp(-((i - kerR)*(i - kerR)) / (2 * sigma*sigma));
sum += arr[i];//將所有的值進行相加
}
for (int i = 0; i < size; i++)
{
arr[i] /= sum;
cout << arr[i] << endl;
}
return arr;
}
void MyGaussianBlur(Mat &srcImage, Mat &dst, int size)
{
CV_Assert(srcImage.channels() == 1 || srcImage.channels() == 3); // 只處理單通道或者三通道影象
int kerR = size / 2;
dst = srcImage.clone();
int channels = dst.channels();
double* arr;
arr = getOneGuassionArray(size, 1);//先求出高斯陣列
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
double GuassionSum[3] = { 0 };
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)//如果只是單通道
{
GuassionSum[0] += arr[kerR + k] * dst.at<uchar>(i, j + k);//行不變,列變換,先做水平方向的卷積
}
else if (channels == 3)//如果是三通道的情況
{
Vec3b bgr = dst.at<Vec3b>(i, j + k);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(GuassionSum[0]);
else if (channels == 3)
{
Vec3b bgr = { static_cast<uchar>(GuassionSum[0]), static_cast<uchar>(GuassionSum[1]), static_cast<uchar>(GuassionSum[2]) };
dst.at<Vec3b>(i, j) = bgr;
}
}
}
for (int i = kerR; i < dst.rows - kerR; i++)
{
for (int j = kerR; j < dst.cols - kerR; j++)
{
double GuassionSum[3] = { 0 };
//滑窗搜尋完成高斯核平滑
for (int k = -kerR; k <= kerR; k++)
{
if (channels == 1)//如果只是單通道
{
GuassionSum[0] += arr[kerR + k] * dst.at<uchar>(i + k, j);//行變,列不換,再做豎直方向的卷積
}
else if (channels == 3)//如果是三通道的情況
{
Vec3b bgr = dst.at<Vec3b>(i + k, j);
auto a = arr[kerR + k];
GuassionSum[0] += a*bgr[0];
GuassionSum[1] += a*bgr[1];
GuassionSum[2] += a*bgr[2];
}
}
for (int k = 0; k < channels; k++)
{
if (GuassionSum[k] < 0)
GuassionSum[k] = 0;
else if (GuassionSum[k] > 255)
GuassionSum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(GuassionSum[0]);
else if (channels == 3)
{
Vec3b bgr = { static_cast<uchar>(GuassionSum[0]), static_cast<uchar>(GuassionSum[1]), static_cast<uchar>(GuassionSum[2]) };
dst.at<Vec3b>(i, j) = bgr;
}
}
}
delete[] arr;
}
void SobelGradDirction(Mat &imageSource, Mat &imageSobelX, Mat &imageSobelY, double *&pointDrection)
{
pointDrection = new double[(imageSource.rows - 2)*(imageSource.cols - 2)];
for (int i = 0; i < (imageSource.rows - 2)*(imageSource.cols - 2); i++)
{
pointDrection[i] = 0;
}
imageSobelX = Mat::zeros(imageSource.size(), CV_32SC1);
imageSobelY = Mat::zeros(imageSource.size(), CV_32SC1);
uchar *P = imageSource.data;
uchar *PX = imageSobelX.data;
uchar *PY = imageSobelY.data;
//取出每行所佔據的位元組數
int step = imageSource.step;
int stepXY = imageSobelX.step;
int index = 0;//梯度方向角的索引
for (int i = 1; i < imageSource.rows - 1; ++i)
{
for (int j = 1; j < imageSource.cols - 1; ++j)
{
//通過指標遍歷影象上每一個畫素
double gradY = P[(i + 1)*step + j - 1] + P[(i + 1)*step + j] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[(i - 1)*step + j] * 2 - P[(i - 1)*step + j + 1];
PY[i*stepXY + j*(stepXY / step)] = abs(gradY);
double gradX = P[(i - 1)*step + j + 1] + P[i*step + j + 1] * 2 + P[(i + 1)*step + j + 1] - P[(i - 1)*step + j - 1] - P[i*step + j - 1] * 2 - P[(i + 1)*step + j - 1];
PX[i*stepXY + j*(stepXY / step)] = abs(gradX);
if (gradX == 0)
{
gradX = 0.00000000000000001; //防止除數為0異常
}
pointDrection[index] = (atan(gradY / gradX)*180)/CV_PI;//弧度轉換為度 角度的範圍是[-90,90]
pointDrection[index] += 90;//將角度的範圍轉換為[0,180],便於計算
index++;
}
}
convertScaleAbs(imageSobelX, imageSobelX);
convertScaleAbs(imageSobelY, imageSobelY);
}
void SobelAmplitude(const Mat imageGradX, const Mat imageGradY, Mat &SobelAmpXY)
{
SobelAmpXY = Mat::zeros(imageGradX.size(), CV_32FC1);
for (int i = 0; i < SobelAmpXY.rows; i++)
{
for (int j = 0; j < SobelAmpXY.cols; j++)
{
SobelAmpXY.at<float>(i,j)= sqrt(imageGradX.at<uchar>(i, j)*imageGradX.at<uchar>(i, j) + imageGradY.at<uchar>(i, j)*imageGradY.at<uchar>(i, j));
}
}
convertScaleAbs(SobelAmpXY, SobelAmpXY);
}
void LocalMaxValue(const Mat imageInput, Mat &imageOutput, double *pointDrection)
{
//複製一張輸出的影象
imageOutput = imageInput.clone();
int k = 0;
for (int i = 1; i < imageInput.rows - 1; i++)
{
for (int j = 1; j < imageInput.cols - 1; j++)
{
/*
value00 value01 value02
value10 value11 value12
value20 value21 value22
*/
//求出每個點的畫素值
int value00 = imageInput.at<uchar>(i - 1, j - 1);
int value01 = imageInput.at<uchar>(i - 1, j);
int value02 = imageInput.at<uchar>(i - 1, j + 1);
int value10 = imageInput.at<uchar>(i , j - 1);
int value11 = imageInput.at<uchar>(i , j);
int value12 = imageInput.at<uchar>(i , j + 1);
int value20 = imageInput.at<uchar>(i + 1, j - 1);
int value21 = imageInput.at<uchar>(i + 1, j);
int value22 = imageInput.at<uchar>(i + 1, j + 1);
//如果梯度角在[0,45]度之間的話
if (pointDrection[k] > 0 && pointDrection[k] <= 45)
{
if ((value11 <= (value12 + (value02 - value12)*tan(pointDrection[k]))) || (value11 <= (value10 + (value20 - value10)*tan(pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[45,90]度之間的話
if (pointDrection[k] > 45 && pointDrection[k] <= 90)
{
if ((value11 <= (value01 + (value02 - value01)*tan(pointDrection[k]))) || (value11 <= (value21 + (value20 - value21)*tan(pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[90,135]度之間的話
if (pointDrection[k] > 90 && pointDrection[k] <= 135)
{
if ((value11 <= (value01 + (value00 - value01)*tan(180-pointDrection[k]))) || (value11 <= (value21 + (value22 - value21)*tan(180-pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
//如果梯度角在[135,180]度之間的話
if (pointDrection[k] > 135 && pointDrection[k] <= 180)
{
if ((value11 <= (value10 + (value00 - value10)*tan(180 - pointDrection[k]))) || (value11 <= (value12 + (value22 - value12)*tan(180 - pointDrection[k]))))
{
imageOutput.at<uchar>(i, j) = 0;
}
}
k++;
}
}
}
void DoubleThreshold(Mat &imageIput, double lowThreshold, double highThreshold)
{
for (int i = 0; i < imageIput.rows; i++)
{
for (int j = 0; j < imageIput.cols; j++)
{
if (imageIput.at<uchar>(i, j) > highThreshold)
{
imageIput.at<uchar>(i, j) = 255;
}
if (imageIput.at<uchar>(i, j) < lowThreshold)
{
imageIput.at<uchar>(i, j) = 0;
}
}
}
}
void DoubleThresholdLink(Mat &imageInput, double lowThreshold, double highThreshold)
{
for (int i = 1; i < imageInput.rows - 1; i++)
{
for (int j = 1; j < imageInput.cols - 1; j++)
{
//處理在高低閾值之間的畫素的點
if (imageInput.at<uchar>(i, j) > lowThreshold && imageInput.at<uchar>(i, j) < 255)
{
if (imageInput.at<uchar>(i - 1, j - 1) == 255 || imageInput.at<uchar>(i - 1, j) == 255
|| imageInput.at<uchar>(i - 1, j + 1) == 255 || imageInput.at<uchar>(i, j - 1) == 255
|| imageInput.at<uchar>(i, j + 1) == 255 || imageInput.at<uchar>(i + 1, j - 1) == 255
|| imageInput.at<uchar>(i + 1, j) == 255 || imageInput.at<uchar>(i + 1, j + 1) == 255)
{
imageInput.at<uchar>(i, j) = 255;
DoubleThresholdLink(imageInput, lowThreshold, highThreshold);//遞迴呼叫雙閾值連結函式進行連結
}
else
{
imageInput.at<uchar>(i, j) = 0;
}
}
}
}
}下面放上原圖和各個步驟的效果圖:
原圖:
原圖的灰度影象:
高斯模糊過的影象:

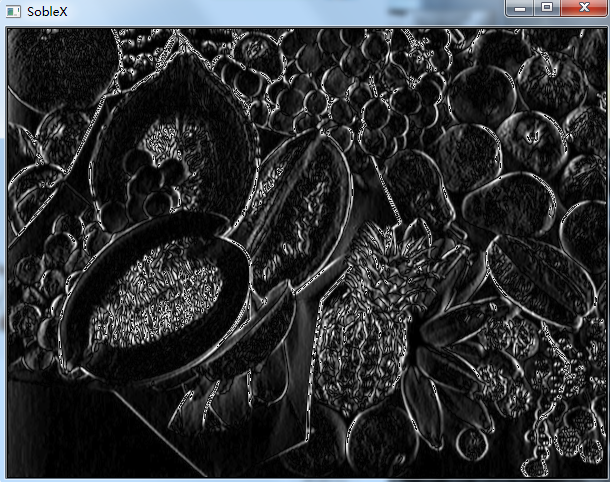
X方向的Soble圖:
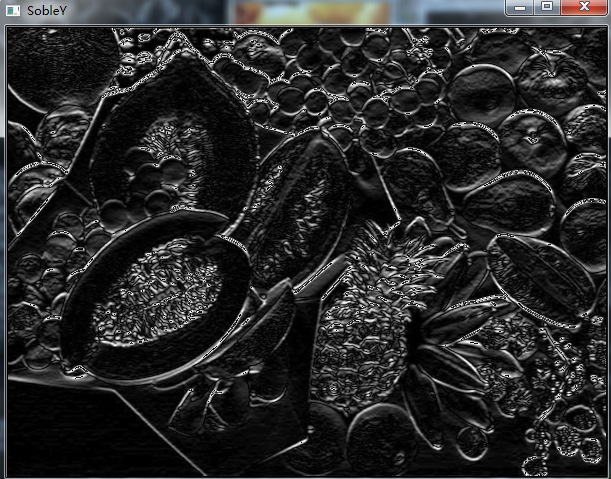
Y方向的Soble圖:
XY方向的Soble圖:
非極大值抑制圖:

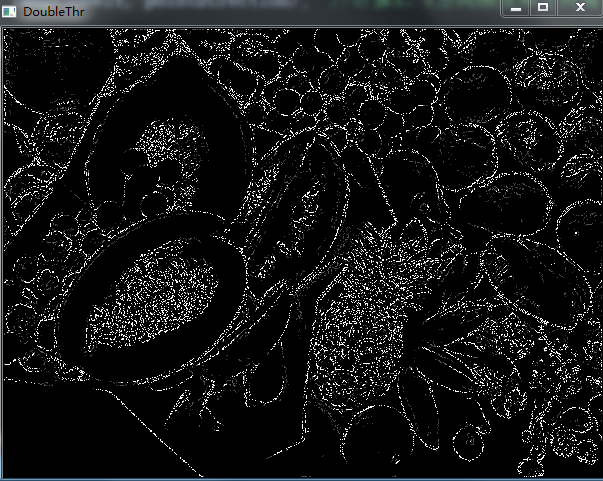
雙閾值處理圖:
最後的Canny效果圖: