
【HEVC學習與研究】39、HEVC幀內編碼的原理和實現(上)
【前面N篇博文都講了一些HEVC幀內預測的程式碼結構和簡單的方法,但是尚未對整體的演算法和實現做一個比較完整的描述。本篇藉助參考文獻《High Efficiency Video Coding (HEVC) -- Algorithms and Architectures》的相關章節的閱讀筆記,對HEVC的幀內預測演算法做一個比較完整的闡述。】
【摘要】:HEVC的幀內預測的架構分為三個步驟:①構建參考畫素陣列;②生成預測畫素;③後處理操作。HEVC標準將這三個步驟進行了精密設計,以求達到較高的編碼效率,同時降低編碼和解碼端的運算要求。HEVC標準的多種預定義的預測模式構成一個模式集合,可以對包括視訊和靜態影象中的多種內容進行預測建模的方法。HEVC的角度預測提供了對包含方向性紋理的物體更高的預測精確度,此外平面和DC模式可以高效地表示影象的平滑區域。
1.引言
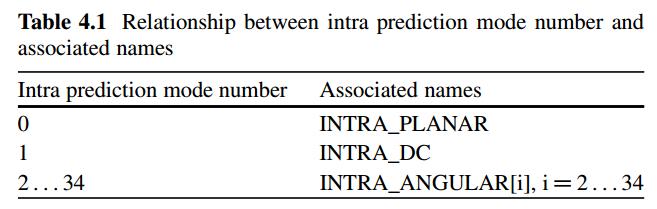
HEVC的幀內預測方法可以分為兩大類:第一類為角度預測,用於準確預測角度結構;第二類為平面模式和DC模式,用於估計平滑影象區域。HEVC總計支援35種幀內預測的模式,如下表所示:
HEVC所有的35種預測模式使用相鄰的重建畫素塊的資訊作為參考畫素。由於重建畫素塊在Transform Block級別上實現,執行幀內預測操作的資料同Transform Block大小相同,從4×4到32×32。HEVC支援各種塊尺寸上的各種預測模式,因此各種預測組合模式的數量龐大,HEVC對於各種預測模式進行了特別設計以利於對任意塊尺寸/模式進行演算法的實現。為了提高獲得更準確預測的可能性,HEVC在進行實際的幀內預測過程之前,對參考畫素進行濾波預處理操作。某些預測模式還包含後處理操作用於優化畫素塊邊緣的連續性,如DC模式,水平模式(Mode 10)和垂直模式(Mode 26)。
2、生成參考畫素
HEVC幀內預測由重建的參考畫素根據預測模式推導而得。相比較H.264,HEVC引入了參考畫素替換方法,該方法無論相鄰畫素是否可得都可以獲取完整的參考畫素集合。另外,HEVC還定義了自適應的濾波過程,可以根據預測模式、塊大小和方向性對參考畫素進行預濾波處理。
(1)參考畫素替換
有時候由於多種原因,幀內預測的時候無法獲取部分或全部參考畫素。例如,位於影象、slice或ties之外的畫素在預測中被認為是不可得的。另外,當constrained intra prediction開啟時,來自幀間預測的PU的畫素將會被忽略,這是為了防止前面被錯誤地傳輸和重建的影象對當前影象造成影響。
對於極端的情況,即所有參考畫素都不可得的情況下,所有參考點都被設定為一個常量(8bit下為128)。
在HM10中的方法:
Void TComPattern::initAdiPattern( TComDataCU* pcCU, UInt uiZorderIdxInPart, UInt uiPartDepth, Int* piAdiBuf, Int iOrgBufStride, Int iOrgBufHeight, Bool& bAbove, Bool& bLeft, Bool bLMmode )
{
//.......
//計算有效相鄰點的個數
bNeighborFlags[iNumUnitsInCu*2] = isAboveLeftAvailable( pcCU, uiPartIdxLT );
iNumIntraNeighbor += (Int)(bNeighborFlags[iNumUnitsInCu*2]);
iNumIntraNeighbor += isAboveAvailable ( pcCU, uiPartIdxLT, uiPartIdxRT, bNeighborFlags+(iNumUnitsInCu*2)+1 );
iNumIntraNeighbor += isAboveRightAvailable( pcCU, uiPartIdxLT, uiPartIdxRT, bNeighborFlags+(iNumUnitsInCu*3)+1 );
iNumIntraNeighbor += isLeftAvailable ( pcCU, uiPartIdxLT, uiPartIdxLB, bNeighborFlags+(iNumUnitsInCu*2)-1 );
iNumIntraNeighbor += isBelowLeftAvailable ( pcCU, uiPartIdxLT, uiPartIdxLB, bNeighborFlags+ iNumUnitsInCu -1 );
//......
fillReferenceSamples (g_bitDepthY, piRoiOrigin, piAdiTemp, bNeighborFlags, iNumIntraNeighbor, iUnitSize, iNumUnitsInCu, iTotalUnits, uiCuWidth, uiCuHeight, uiWidth, uiHeight, iPicStride, bLMmode);
//......
}其中fillReferenceSamples的實現如下:
Void TComPattern::fillReferenceSamples(Int bitDepth, Pel* piRoiOrigin, Int* piAdiTemp, Bool* bNeighborFlags, Int iNumIntraNeighbor, Int iUnitSize, Int iNumUnitsInCu, Int iTotalUnits, UInt uiCuWidth, UInt uiCuHeight, UInt uiWidth, UInt uiHeight, Int iPicStride, Bool bLMmode )
{
Pel* piRoiTemp;
Int i, j;
Int iDCValue = 1 << (bitDepth - 1);
if (iNumIntraNeighbor == 0)
{
// Fill border with DC value
for (i=0; i<uiWidth; i++)
{
piAdiTemp[i] = iDCValue;
}
for (i=1; i<uiHeight; i++)
{
piAdiTemp[i*uiWidth] = iDCValue;
}
}
//......
}Void TComPattern::fillReferenceSamples(Int bitDepth, Pel* piRoiOrigin, Int* piAdiTemp, Bool* bNeighborFlags, Int iNumIntraNeighbor, Int iUnitSize, Int iNumUnitsInCu, Int iTotalUnits, UInt uiCuWidth, UInt uiCuHeight, UInt uiWidth, UInt uiHeight, Int iPicStride, Bool bLMmode )
{
//......
else if (iNumIntraNeighbor == iTotalUnits)
{
// Fill top-left border with rec. samples
piRoiTemp = piRoiOrigin - iPicStride - 1;
piAdiTemp[0] = piRoiTemp[0];
// Fill left border with rec. samples
piRoiTemp = piRoiOrigin - 1;
if (bLMmode)
{
piRoiTemp --; // move to the second left column
}
for (i=0; i<uiCuHeight; i++)
{
piAdiTemp[(1+i)*uiWidth] = piRoiTemp[0];
piRoiTemp += iPicStride;
}
// Fill below left border with rec. samples
for (i=0; i<uiCuHeight; i++)
{
piAdiTemp[(1+uiCuHeight+i)*uiWidth] = piRoiTemp[0];
piRoiTemp += iPicStride;
}
// Fill top border with rec. samples
piRoiTemp = piRoiOrigin - iPicStride;
for (i=0; i<uiCuWidth; i++)
{
piAdiTemp[1+i] = piRoiTemp[i];
}
// Fill top right border with rec. samples
piRoiTemp = piRoiOrigin - iPicStride + uiCuWidth;
for (i=0; i<uiCuWidth; i++)
{
piAdiTemp[1+uiCuWidth+i] = piRoiTemp[i];
}
}
//......
}如果至少一個畫素為可用資料,其他不可得的畫素都將使用該畫素按順時針的順序進行替換。
①當p[-1][2N-1]不可得時,則沿著p[-1][2N-2],p[-1][2N-3].....p[-1][-1],p[0][-1],p[1][-1]......p[2N-1][-1],即先自下而上,後從左向右查詢,由找到的第一個有效的點替換。
②所有的無效的點p[-1][y], y=2N-2~1,都由p[-1][y+1]替換,即對於垂直方向的參考畫素,無效點都由下方的點替換。
③所有的無效的點p[x][-1], x=0~2N-1,都由p[x-1][-1]替換,即對於水平方向的參考畫素,無效點都由左側的點替換。
在fillReferenceSamples函式的最後一個選擇結構中實現的便是該方法:Void TComPattern::fillReferenceSamples(Int bitDepth, Pel* piRoiOrigin, Int* piAdiTemp, Bool* bNeighborFlags, Int iNumIntraNeighbor, Int iUnitSize, Int iNumUnitsInCu, Int iTotalUnits, UInt uiCuWidth, UInt uiCuHeight, UInt uiWidth, UInt uiHeight, Int iPicStride, Bool bLMmode )
{
//......
else // reference samples are partially available
{
Int iNumUnits2 = iNumUnitsInCu<<1;
Int iTotalSamples = iTotalUnits*iUnitSize;
Pel piAdiLine[5 * MAX_CU_SIZE];
Pel *piAdiLineTemp;
Bool *pbNeighborFlags;
Int iNext, iCurr;
Pel piRef = 0;
// Initialize
for (i=0; i<iTotalSamples; i++)
{
piAdiLine[i] = iDCValue;
}
// Fill top-left sample
piRoiTemp = piRoiOrigin - iPicStride - 1;
piAdiLineTemp = piAdiLine + (iNumUnits2*iUnitSize);
pbNeighborFlags = bNeighborFlags + iNumUnits2;
if (*pbNeighborFlags)
{
piAdiLineTemp[0] = piRoiTemp[0];
for (i=1; i<iUnitSize; i++)
{
piAdiLineTemp[i] = piAdiLineTemp[0];
}
}
// Fill left & below-left samples
piRoiTemp += iPicStride;
if (bLMmode)
{
piRoiTemp --; // move the second left column
}
piAdiLineTemp--;
pbNeighborFlags--;
for (j=0; j<iNumUnits2; j++)
{
if (*pbNeighborFlags)
{
for (i=0; i<iUnitSize; i++)
{
piAdiLineTemp[-i] = piRoiTemp[i*iPicStride];
}
}
piRoiTemp += iUnitSize*iPicStride;
piAdiLineTemp -= iUnitSize;
pbNeighborFlags--;
}
// Fill above & above-right samples
piRoiTemp = piRoiOrigin - iPicStride;
piAdiLineTemp = piAdiLine + ((iNumUnits2+1)*iUnitSize);
pbNeighborFlags = bNeighborFlags + iNumUnits2 + 1;
for (j=0; j<iNumUnits2; j++)
{
if (*pbNeighborFlags)
{
for (i=0; i<iUnitSize; i++)
{
piAdiLineTemp[i] = piRoiTemp[i];
}
}
piRoiTemp += iUnitSize;
piAdiLineTemp += iUnitSize;
pbNeighborFlags++;
}
// Pad reference samples when necessary
iCurr = 0;
iNext = 1;
piAdiLineTemp = piAdiLine;
while (iCurr < iTotalUnits)
{
if (!bNeighborFlags[iCurr])
{
if(iCurr == 0)
{
while (iNext < iTotalUnits && !bNeighborFlags[iNext])
{
iNext++;
}
piRef = piAdiLine[iNext*iUnitSize];
// Pad unavailable samples with new value
while (iCurr < iNext)
{
for (i=0; i<iUnitSize; i++)
{
piAdiLineTemp[i] = piRef;
}
piAdiLineTemp += iUnitSize;
iCurr++;
}
}
else
{
piRef = piAdiLine[iCurr*iUnitSize-1];
for (i=0; i<iUnitSize; i++)
{
piAdiLineTemp[i] = piRef;
}
piAdiLineTemp += iUnitSize;
iCurr++;
}
}
else
{
piAdiLineTemp += iUnitSize;
iCurr++;
}
}
// Copy processed samples
piAdiLineTemp = piAdiLine + uiHeight + iUnitSize - 2;
for (i=0; i<uiWidth; i++)
{
piAdiTemp[i] = piAdiLineTemp[i];
}
piAdiLineTemp = piAdiLine + uiHeight - 1;
for (i=1; i<uiHeight; i++)
{
piAdiTemp[i*uiWidth] = piAdiLineTemp[-i];
}
}
}
(2)參考畫素的濾波
同H264的8×8幀內預測類似,HEVC的幀內預測參考畫素都會依據條件進行平滑濾波處理。濾波的目的在於提升幀內預測的畫素塊的視覺效果,減小邊緣可能產生的突變感。是否對參考畫素進行濾波取決於幀內預測模式和預測畫素塊的大小。
當採用DC模式,或預測畫素塊為4×4大小時,不需要進行濾波操作。對於其他情況,塊的大小和預測的方向決定了是否要進行濾波操作。對於8×8大小的編碼畫素塊,僅僅針對對角線方向的預測模式(即模式2,18,34)進行濾波。對於16×16的畫素塊,大部分模式都會進行參考點濾波,除了幾個近似水平和垂直模式(即模式9,10,11,25,27)。對於32×32的畫素塊,除了垂直和水平模式(即模式10和26)外所有的模式都要進行濾波。
對參考畫素進行濾波時,共有兩種濾波方法可供選擇。預設情況下,濾波器採用一種[1,2,1]一維濾波器對參考畫素進行處理。另一種方法,如果畫素塊的大小為32×32,且參考畫素的走勢足夠平坦,那麼參考畫素將依據起點、終點和拐點三個特殊點(p[-1][63],p[-1][-1],p[63][-1])進行線性插值的方法獲得。關於是否“足夠平坦”這一問題,則依以下兩個準則確定(b取表示一個顏色分量的bit位數):
|p[-1][-1]+p[2N-1][-1]-2p[N-1][-1]| < (1<<(b-5))
|p[-1][-1]+p[-1][2N-1]-2p[-1][N-1]| < (1<<(b-5))
HM中的實現方法如:
Void TComPattern::initAdiPattern( TComDataCU* pcCU, UInt uiZorderIdxInPart, UInt uiPartDepth, Int* piAdiBuf, Int iOrgBufStride, Int iOrgBufHeight, Bool& bAbove, Bool& bLeft, Bool bLMmode )
{
//......
if (pcCU->getSlice()->getSPS()->getUseStrongIntraSmoothing())
{
Int blkSize = 32;
Int bottomLeft = piFilterBuf[0];
Int topLeft = piFilterBuf[uiCuHeight2];
Int topRight = piFilterBuf[iBufSize-1];
Int threshold = 1 << (g_bitDepthY - 5);
Bool bilinearLeft = abs(bottomLeft+topLeft-2*piFilterBuf[uiCuHeight]) < threshold;
Bool bilinearAbove = abs(topLeft+topRight-2*piFilterBuf[uiCuHeight2+uiCuHeight]) < threshold;
if (uiCuWidth>=blkSize && (bilinearLeft && bilinearAbove))
{
Int shift = g_aucConvertToBit[uiCuWidth] + 3; // log2(uiCuHeight2)
piFilterBufN[0] = piFilterBuf[0];
piFilterBufN[uiCuHeight2] = piFilterBuf[uiCuHeight2];
piFilterBufN[iBufSize - 1] = piFilterBuf[iBufSize - 1];
for (i = 1; i < uiCuHeight2; i++)
{
piFilterBufN[i] = ((uiCuHeight2-i)*bottomLeft + i*topLeft + uiCuHeight) >> shift;
}
for (i = 1; i < uiCuWidth2; i++)
{
piFilterBufN[uiCuHeight2 + i] = ((uiCuWidth2-i)*topLeft + i*topRight + uiCuWidth) >> shift;
}
}
else
{
// 1. filtering with [1 2 1]
piFilterBufN[0] = piFilterBuf[0];
piFilterBufN[iBufSize - 1] = piFilterBuf[iBufSize - 1];
for (i = 1; i < iBufSize - 1; i++)
{
piFilterBufN[i] = (piFilterBuf[i - 1] + 2 * piFilterBuf[i]+piFilterBuf[i + 1] + 2) >> 2;
}
}
}
else
{
// 1. filtering with [1 2 1]
piFilterBufN[0] = piFilterBuf[0];
piFilterBufN[iBufSize - 1] = piFilterBuf[iBufSize - 1];
for (i = 1; i < iBufSize - 1; i++)
{
piFilterBufN[i] = (piFilterBuf[i - 1] + 2 * piFilterBuf[i]+piFilterBuf[i + 1] + 2) >> 2;
}
}
//......
}