
linux執行緒間同步(通訊)的幾種方法——互斥鎖、條件變數、訊號量、讀寫鎖
Linux下提供了多種方式來處理執行緒同步,最常用的是互斥鎖、條件變數、訊號量和讀寫鎖。
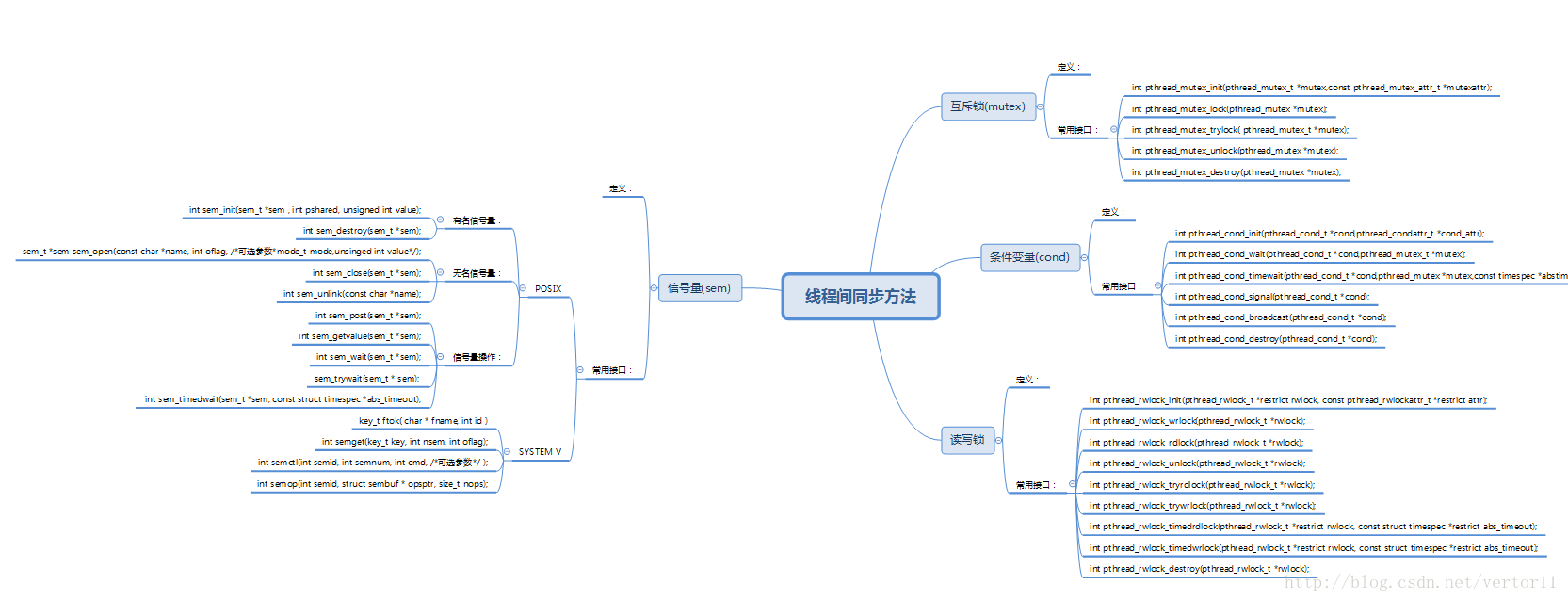
下面是思維導圖:
一、互斥鎖(mutex)
鎖機制是同一時刻只允許一個執行緒執行一個關鍵部分的程式碼。
1 . 初始化鎖
int pthread_mutex_init(pthread_mutex_t *mutex,const pthread_mutex_attr_t *mutexattr);其中引數 mutexattr 用於指定鎖的屬性(見下),如果為NULL則使用預設屬性。
互斥鎖的屬性在建立鎖的時候指定,在LinuxThreads實現中僅有一個鎖型別屬性,不同的鎖型別在試圖對一個已經被鎖定的互斥鎖加鎖時表現不同。當前有四個值可供選擇:
(1)PTHREAD_MUTEX_TIMED_NP,這是預設值,也就是普通鎖。當一個執行緒加鎖以後,其餘請求鎖的執行緒將形成一個等待佇列,並在解鎖後按優先順序獲得鎖。這種鎖策略保證了資源分配的公平性。
(2)PTHREAD_MUTEX_RECURSIVE_NP,巢狀鎖,允許同一個執行緒對同一個鎖成功獲得多次,並通過多次unlock解鎖。如果是不同執行緒請求,則在加鎖執行緒解鎖時重新競爭。
(3)PTHREAD_MUTEX_ERRORCHECK_NP,檢錯鎖,如果同一個執行緒請求同一個鎖,則返回EDEADLK,否則與PTHREAD_MUTEX_TIMED_NP型別動作相同。這樣就保證當不允許多次加鎖時不會出現最簡單情況下的死鎖。
(4)PTHREAD_MUTEX_ADAPTIVE_NP,適應鎖,動作最簡單的鎖型別,僅等待解鎖後重新競爭。
2 . 阻塞加鎖
int pthread_mutex_lock(pthread_mutex *mutex);3 . 非阻塞加鎖
int pthread_mutex_trylock( pthread_mutex_t *mutex);該函式語義與 pthread_mutex_lock() 類似,不同的是在鎖已經被佔據時返回 EBUSY 而不是掛起等待。
4 . 解鎖(要求鎖是lock狀態,並且由加鎖執行緒解鎖)
int pthread_mutex_unlock(pthread_mutex *mutex);5 . 銷燬鎖(此時鎖必需unlock狀態,否則返回EBUSY)
int pthread_mutex_destroy(pthread_mutex *mutex);示例程式碼:
#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <pthread.h> pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; int gn; void* thread(void *arg) { printf("thread's ID is %d\n",pthread_self()); pthread_mutex_lock(&mutex); gn = 12; printf("Now gn = %d\n",gn); pthread_mutex_unlock(&mutex); return NULL; } int main() { pthread_t id; printf("main thread's ID is %d\n",pthread_self()); gn = 3; printf("In main func, gn = %d\n",gn); if (!pthread_create(&id, NULL, thread, NULL)) { printf("Create thread success!\n"); } else { printf("Create thread failed!\n"); } pthread_join(id, NULL); pthread_mutex_destroy(&mutex); return 0; }
二、條件變數(cond)
條件變數是利用執行緒間共享全域性變數進行同步的一種機制。條件變數上的基本操作有:觸發條件(當條件變為 true 時);等待條件,掛起執行緒直到其他執行緒觸發條件。
1 . 初始化條件變數
int pthread_cond_init(pthread_cond_t *cond,pthread_condattr_t *cond_attr); 儘管POSIX標準中為條件變數定義了屬性,但在Linux中沒有實現,因此cond_attr值通常為NULL,且被忽略。
2 . 有兩個等待函式
(1)無條件等待
int pthread_cond_wait(pthread_cond_t *cond,pthread_mutex_t *mutex); (2)計時等待
int pthread_cond_timewait(pthread_cond_t *cond,pthread_mutex *mutex,const timespec *abstime); 如果在給定時刻前條件沒有滿足,則返回ETIMEOUT,結束等待,其中abstime以與time()系統呼叫相同意義的絕對時間形式出現,0表示格林尼治時間1970年1月1日0時0分0秒。
無論哪種等待方式,都必須和一個互斥鎖配合,以防止多個執行緒同時請求(用 pthread_cond_wait() 或 pthread_cond_timedwait() 請求)競爭條件(Race Condition)。mutex互斥鎖必須是普通鎖(PTHREAD_MUTEX_TIMED_NP)或者適應鎖(PTHREAD_MUTEX_ADAPTIVE_NP),且在呼叫pthread_cond_wait()前必須由本執行緒加鎖(pthread_mutex_lock()),而在更新條件等待佇列以前,mutex保持鎖定狀態,並在執行緒掛起進入等待前解鎖。在條件滿足從而離開pthread_cond_wait()之前,mutex將被重新加鎖,以與進入pthread_cond_wait()前的加鎖動作對應。
3 . 激發條件
(1)啟用一個等待該條件的執行緒(存在多個等待執行緒時按入隊順序啟用其中一個)
int pthread_cond_signal(pthread_cond_t *cond);(2)啟用所有等待執行緒
int pthread_cond_broadcast(pthread_cond_t *cond);4 . 銷燬條件變數
int pthread_cond_destroy(pthread_cond_t *cond); 只有在沒有執行緒在該條件變數上等待的時候才能銷燬這個條件變數,否則返回EBUSY
說明:
1. pthread_cond_wait 自動解鎖互斥量(如同執行了pthread_unlock_mutex),並等待條件變數觸發。這時執行緒掛起,不佔用CPU時間,直到條件變數被觸發(變數為ture)。在呼叫 pthread_cond_wait之前,應用程式必須加鎖互斥量。pthread_cond_wait函式返回前,自動重新對互斥量加鎖(如同執行了pthread_lock_mutex)。
2. 互斥量的解鎖和在條件變數上掛起都是自動進行的。因此,在條件變數被觸發前,如果所有的執行緒都要對互斥量加鎖,這種機制可保證線上程加鎖互斥量和進入等待條件變數期間,條件變數不被觸發。條件變數要和互斥量相聯結,以避免出現條件競爭——個執行緒預備等待一個條件變數,當它在真正進入等待之前,另一個執行緒恰好觸發了該條件(條件滿足訊號有可能在測試條件和呼叫pthread_cond_wait函式(block)之間被髮出,從而造成無限制的等待)。
3. 條件變數函式不是非同步訊號安全的,不應當在訊號處理程式中進行呼叫。特別要注意,如果在訊號處理程式中呼叫 pthread_cond_signal 或 pthread_cond_boardcast 函式,可能導致呼叫執行緒死鎖
示例程式碼1:
#include <stdio.h>
#include <pthread.h>
#include "stdlib.h"
#include "unistd.h"
pthread_mutex_t mutex;
pthread_cond_t cond;
void hander(void *arg)
{
free(arg);
(void)pthread_mutex_unlock(&mutex);
}
void *thread1(void *arg)
{
pthread_cleanup_push(hander, &mutex);
while (1) {
printf("thread1 is running\n");
pthread_mutex_lock(&mutex);
pthread_cond_wait(&cond,&mutex);
printf("thread1 applied the condition\n");
pthread_mutex_unlock(&mutex);
sleep(4);
}
pthread_cleanup_pop(0);
}
void *thread2(void *arg)
{
while (1) {
printf("thread2 is running\n");
pthread_mutex_lock(&mutex);
pthread_cond_wait(&cond,&mutex);
printf("thread2 applied the condition\n");
pthread_mutex_unlock(&mutex);
sleep(1);
}
}
int main()
{
pthread_t thid1,thid2;
printf("condition variable study!\n");
pthread_mutex_init(&mutex,NULL);
pthread_cond_init(&cond,NULL);
pthread_create(&thid1,NULL,thread1,NULL);
pthread_create(&thid2,NULL,thread2,NULL);
sleep(1);
do {
pthread_cond_signal(&cond);
} while(1);
sleep(20);
pthread_exit(0);
return 0;
}示例程式碼2:
#include <pthread.h>
#include <unistd.h>
#include "stdio.h"
#include "stdlib.h"
static pthread_mutex_t mtx = PTHREAD_MUTEX_INITIALIZER;
static pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
struct node
{
int n_number;
struct node *n_next;
}*head = NULL;
static void cleanup_handler(void *arg)
{
printf("Cleanup handler of second thread.\n");
free(arg);
(void)pthread_mutex_unlock(&mtx);
}
static void *thread_func(void *arg)
{
struct node *p = NULL;
pthread_cleanup_push(cleanup_handler, p);
while (1) {
// 這個mutex主要是用來保證pthread_cond_wait的併發性。
pthread_mutex_lock(&mtx);
while (head == NULL) {
/* 這個while要特別說明一下,單個pthread_cond_wait功能很完善,為何
* 這裡要有一個while (head == NULL)呢?因為pthread_cond_wait裡的線
* 程可能會被意外喚醒,如果這個時候head != NULL,則不是我們想要的情況。
* 這個時候,應該讓執行緒繼續進入pthread_cond_wait
* pthread_cond_wait會先解除之前的pthread_mutex_lock鎖定的mtx,
* 然後阻塞在等待對列裡休眠,直到再次被喚醒(大多數情況下是等待的條件成立
* 而被喚醒,喚醒後,該程序會先鎖定先pthread_mutex_lock(&mtx);,再讀取資源
* 用這個流程是比較清楚的。*/
pthread_cond_wait(&cond, &mtx);
p = head;
head = head->n_next;
printf("Got %d from front of queue\n", p->n_number);
free(p);
}
pthread_mutex_unlock(&mtx); // 臨界區資料操作完畢,釋放互斥鎖。
}
pthread_cleanup_pop(0);
return 0;
}
int main(void)
{
pthread_t tid;
int i;
struct node *p;
/* 子執行緒會一直等待資源,類似生產者和消費者,但是這裡的消費者可以是多個消費者,
* 而不僅僅支援普通的單個消費者,這個模型雖然簡單,但是很強大。*/
pthread_create(&tid, NULL, thread_func, NULL);
sleep(1);
for (i = 0; i < 10; i++)
{
p = (struct node*)malloc(sizeof(struct node));
p->n_number = i;
pthread_mutex_lock(&mtx); // 需要操作head這個臨界資源,先加鎖。
p->n_next = head;
head = p;
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mtx); //解鎖
sleep(1);
}
printf("thread 1 wanna end the line.So cancel thread 2.\n");
/* 關於pthread_cancel,有一點額外的說明,它是從外部終止子執行緒,子執行緒會在最近的取消點,
* 退出執行緒,而在我們的程式碼裡,最近的取消點肯定就是pthread_cond_wait()了。*/
pthread_cancel(tid);
pthread_join(tid, NULL);
printf("All done -- exiting\n");
return 0;
}可以看出,等待條件變數訊號的用法約定一般是這樣的:
...
pthread_mutex_lock(&mutex);
...
pthread_cond_wait (&cond, &mutex);
...
pthread_mutex_unlock (&mutex);
...相信很多人都會有這個疑問:為什麼pthread_cond_wait需要的互斥鎖不在函式內部定義,而要使使用者定義的呢?現在沒有時間研究 pthread_cond_wait 的原始碼,帶著這個問題對條件變數的用法做如下猜測,希望明白真相看過原始碼的朋友不吝指正。
- pthread_cond_wait 和 pthread_cond_timewait 函式為什麼需要互斥鎖?因為:條件變數是執行緒同步的一種方法,這兩個函式又是等待訊號的函式,函式內部一定有須要同步保護的資料。
- 使用使用者定義的互斥鎖而不在函式內部定義的原因是:無法確定會有多少使用者使用條件變數,所以每個互斥鎖都須要動態定義,而且管理大量互斥鎖的開銷太大,使用使用者定義的即靈活又方便,符合UNIX哲學的程式設計風格(隨便推薦閱讀《UNIX程式設計哲學》這本好書!)。
- 好了,說完了1和2,我們來自由猜測一下 pthread_cond_wait 函式的內部結構吧:
int pthread_cond_wait(pthread_cond_t *cond, pthread_mutex_t *mutex)
{
if(沒有條件訊號)
{
(1)pthread_mutex_unlock (mutex); // 因為使用者在函式外面已經加鎖了(這是使用約定),但是在沒有訊號的情況下為了讓其他執行緒也能等待cond,必須解鎖。
(2) 阻塞當前執行緒,等待條件訊號(當然應該是類似於中斷觸發的方式等待,而不是軟體輪詢的方式等待)... 有訊號就繼續執行後面。
(3) pthread_mutex_lock (mutex); // 因為使用者在函式外面要解鎖(這也是使用約定),所以要與1呼應加鎖,保證使用者感覺依然是自己加鎖、自己解鎖。
}
...
}三、 訊號量
如同程序一樣,執行緒也可以通過訊號量來實現通訊,雖然是輕量級的。
執行緒使用的基本訊號量函式有四個:
#include <semaphore.h>1 . 初始化訊號量
int sem_init (sem_t *sem , int pshared, unsigned int value);引數:
sem - 指定要初始化的訊號量;
pshared - 訊號量 sem 的共享選項,linux只支援0,表示它是當前程序的區域性訊號量;
value - 訊號量 sem 的初始值。
2 . 訊號量值加1
給引數sem指定的訊號量值加1。
int sem_post(sem_t *sem);3 . 訊號量值減1
給引數sem指定的訊號量值減1。
int sem_wait(sem_t *sem);如果sem所指的訊號量的數值為0,函式將會等待直到有其它執行緒使它不再是0為止。
4 . 銷燬訊號量
銷燬指定的訊號量。
int sem_destroy(sem_t *sem);示例程式碼:
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include <pthread.h>
#include <semaphore.h>
#include <errno.h>
#define return_if_fail(p) if((p) == 0){printf ("[%s]:func error!\n", __func__);return;}
typedef struct _PrivInfo
{
sem_t s1;
sem_t s2;
time_t end_time;
}PrivInfo;
static void info_init (PrivInfo* prifo);
static void info_destroy (PrivInfo* prifo);
static void* pthread_func_1 (PrivInfo* prifo);
static void* pthread_func_2 (PrivInfo* prifo);
int main (int argc, char** argv)
{
pthread_t pt_1 = 0;
pthread_t pt_2 = 0;
int ret = 0;
PrivInfo* prifo = NULL;
prifo = (PrivInfo* )malloc (sizeof (PrivInfo));
if (prifo == NULL) {
printf ("[%s]: Failed to malloc priv.\n");
return -1;
}
info_init (prifo);
ret = pthread_create (&pt_1, NULL, (void*)pthread_func_1, prifo);
if (ret != 0) {
perror ("pthread_1_create:");
}
ret = pthread_create (&pt_2, NULL, (void*)pthread_func_2, prifo);
if (ret != 0) {
perror ("pthread_2_create:");
}
pthread_join (pt_1, NULL);
pthread_join (pt_2, NULL);
info_destroy (prifo);
return 0;
}
static void info_init (PrivInfo* prifo)
{
return_if_fail (prifo != NULL);
prifo->end_time = time(NULL) + 10;
sem_init (&prifo->s1, 0, 1);
sem_init (&prifo->s2, 0, 0);
return;
}
static void info_destroy (PrivInfo* prifo)
{
return_if_fail (prifo != NULL);
sem_destroy (&prifo->s1);
sem_destroy (&prifo->s2);
free (prifo);
prifo = NULL;
return;
}
static void* pthread_func_1 (PrivInfo* prifo)
{
return_if_fail (prifo != NULL);
while (time(NULL) < prifo->end_time)
{
sem_wait (&prifo->s2);
printf ("pthread1: pthread1 get the lock.\n");
sem_post (&prifo->s1);
printf ("pthread1: pthread1 unlock\n");
sleep (1);
}
return;
}
static void* pthread_func_2 (PrivInfo* prifo)
{
return_if_fail (prifo != NULL);
while (time (NULL) < prifo->end_time)
{
sem_wait (&prifo->s1);
printf ("pthread2: pthread2 get the unlock.\n");
sem_post (&prifo->s2);
printf ("pthread2: pthread2 unlock.\n");
sleep (1);
}
return;
}四 讀寫鎖
4.1 注意事項
- 1.如果一個執行緒用讀鎖鎖定了臨界區,那麼其他執行緒也可以用讀鎖來進入臨界區,這樣就可以多個執行緒並行操作。但這個時候,如果再進行寫鎖加鎖就會發生阻塞,寫鎖請求阻塞後,後面如果繼續有讀鎖來請求,這些後來的讀鎖都會被阻塞!這樣避免了讀鎖長期佔用資源,防止寫鎖飢餓!
- 2.如果一個執行緒用寫鎖鎖住了臨界區,那麼其他執行緒不管是讀鎖還是寫鎖都會發生阻塞!
4.2 常用介面
1. 初始化:
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock, const pthread_rwlockattr_t *restrict attr);- 讀寫加鎖
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_timedrdlock(pthread_rwlock_t *restrict rwlock, const struct timespec *restrict abs_timeout);
int pthread_rwlock_timedwrlock(pthread_rwlock_t *restrict rwlock, const struct timespec *restrict abs_timeout);3.銷燬鎖
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);應用例項:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>
/* 初始化讀寫鎖 */
pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER;
/* 全域性資源 */
int global_num = 10;
void err_exit(const char *err_msg)
{
printf("error:%s\n", err_msg);
exit(1);
}
/* 讀鎖執行緒函式 */
void *thread_read_lock(void *arg)
{
char *pthr_name = (char *)arg;
while (1)
{
/* 讀加鎖 */
pthread_rwlock_rdlock(&rwlock);
printf("執行緒%s進入臨界區,global_num = %d\n", pthr_name, global_num);
sleep(1);
printf("執行緒%s離開臨界區...\n", pthr_name);
/* 讀解鎖 */
pthread_rwlock_unlock(&rwlock);
sleep(1);
}
return NULL;
}
/* 寫鎖執行緒函式 */
void *thread_write_lock(void *arg)
{
char *pthr_name = (char *)arg;
while (1)
{
/* 寫加鎖 */
pthread_rwlock_wrlock(&rwlock);
/* 寫操作 */
global_num++;
printf("執行緒%s進入臨界區,global_num = %d\n", pthr_name, global_num);
sleep(1);
printf("執行緒%s離開臨界區...\n", pthr_name);
/* 寫解鎖 */
pthread_rwlock_unlock(&rwlock);
sleep(2);
}
return NULL;
}
int main(void)
{
pthread_t tid_read_1, tid_read_2, tid_write_1, tid_write_2;
/* 建立4個執行緒,2個讀,2個寫 */
if (pthread_create(&tid_read_1, NULL, thread_read_lock, "read_1") != 0)
err_exit("create tid_read_1");
if (pthread_create(&tid_read_2, NULL, thread_read_lock, "read_2") != 0)
err_exit("create tid_read_2");
if (pthread_create(&tid_write_1, NULL, thread_write_lock, "write_1") != 0)
err_exit("create tid_write_1");
if (pthread_create(&tid_write_2, NULL, thread_write_lock, "write_2") != 0)
err_exit("create tid_write_2");
/* 隨便等待一個執行緒,防止main結束 */
if (pthread_join(tid_read_1, NULL) != 0)
err_exit("pthread_join()");
return 0;
}