
opencv影象處理(1.Visual C++6.0 MFC的使用)
1.Visual C++6.0 MFC的使用
1.安裝Microsoft Visual C++6.0
(略)
2.建立一個MFC單文件應用程式
開啟Microsoft Visual C++6.0
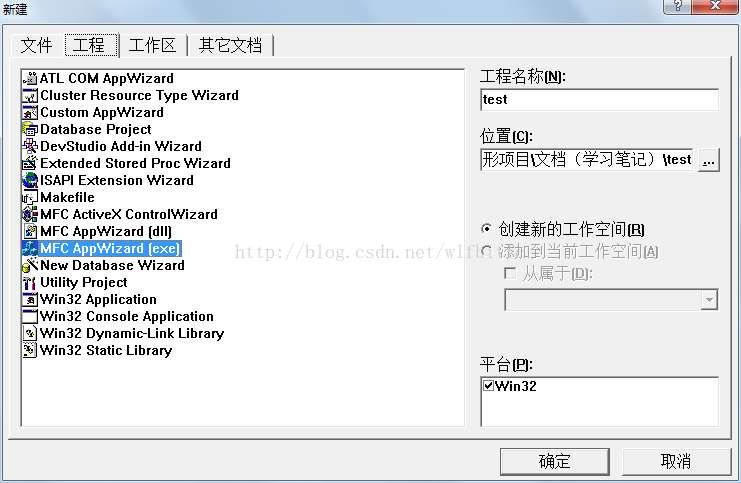
選擇<新建>-<工程>-<MFC AppWizard(exe)
輸入工程名稱:test;位置:(自己建立一個)
點選<確定>
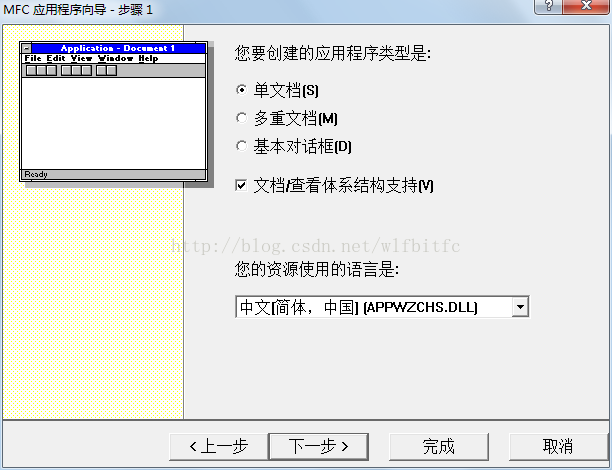
 在(MFC 應用程式嚮導-步驟1)中,選擇應用程式型別為:單文件,直接點選<完成>
在(MFC 應用程式嚮導-步驟1)中,選擇應用程式型別為:單文件,直接點選<完成>
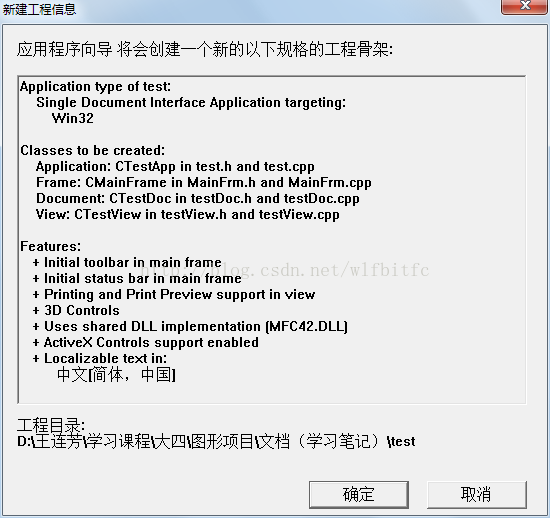
 彈出對話方塊,點選<確定>
彈出對話方塊,點選<確定>
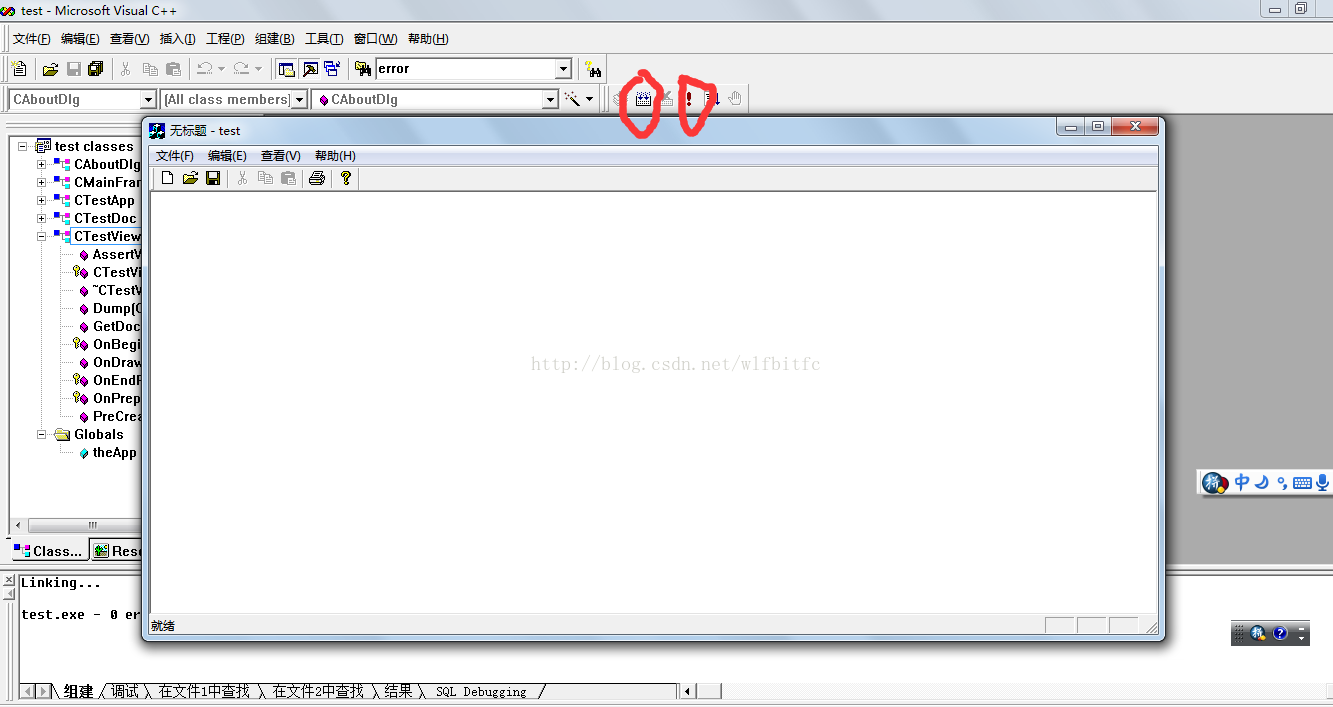
3.執行程式
點選<連結>-<執行!>
相關推薦
opencv影象處理(1.Visual C++6.0 MFC的使用)
1.Visual C++6.0 MFC的使用 1.安裝Microsoft Visual C++6.0 (略) 2.建立一個MFC單文件應用程式 開啟Microsoft Visual C++6.0 選擇<新建>-<工程>-<MFC AppWiza
C++ Opencv——影象處理(預處理+矩形物體分割)
影象預處理分割目標 // ROI提取 Mat Image_ROI(Mat frame) { Mat gray, bw, img, bkup; /*目標提取——預處理——Mat ROI*/ /*預處理很重要——直接找到目標*/ //預處理很重要——直接找到目標 // 灰度化
C++ Opencv——影象處理(色道分離融合)
Mat HSV; cv::cvtColor(src, HSV, CV_BGR2HSV); imshow("get HSV", HSV); vector<Mat> H_S_V; split(HSV, H_S_V); imshow("H", H_S_V[0]); imshow("S", H_
Python程式設計 簡單的影象處理(1)
Python程式設計 簡單的影象處理(1) 1.寫個濾鏡 照片照的好,不如濾鏡用得好!一款好的濾鏡軟體可以讓照片呈現不一樣的風格乃至風情,修理照片需要揚長避短達到最佳效果。可是濾鏡款式千百種,卻沒有一款專門為你設計??不如自己來寫個濾鏡吧! 1.先上一張圖: 藉助Python的兩個
影象處理(1)——對比度和亮度調整
1.內容 設計一個Sigmoid函式,實現對影象的對比度調整; 使用opencv視窗系統的slider控制元件,互動改變Sigmoid函式的引數,實現不同程度的對比度調整; 2.方法 一次函式方法 想要調整圖片的對比度,就要對圖片中的畫素進行操作,改變畫素的值來
影象處理(1)直方圖均衡
為了增強影象對比度,通常需要調整影象的灰度級分佈,使得亮暗更加分明。如果一幅影象中某些灰度級分佈概率過小,就會導致這部分影象不清晰,因此灰度級分佈的越平均影象對比度越好。表現在空間上,如果減小分佈較大的灰度級的面積,而增加分佈較小的灰度級面積,就會突出原來顯示不清晰的部分。 調整影象對
opencv影象處理(二):濾波器
濾波器在影象處理中的應用非常廣泛,OpenCV也有個直接使用濾波器掩碼(核)的函式filter2D,將影象與核進行卷積運算得到目標影象。卷積是在每一個影象塊與某個運算元(核)之間進行的運算,而核就是一個固定大小的數值陣列。 &n
opencv影象處理(一):讀取圖片,裁剪圖片
1.利用opencv讀取圖片: # -*- coding: utf-8 -*- # !/usr/bin/env python # @Time : 2018/11/19 14:59 # @Author : xhh # @Desc : 讀取圖片 # @File : open
python+OpenCV影象處理(十二)車牌定位中對影象的形態學組合操作處理
車牌定位中對影象的形態學組合操作處理 所謂的車牌定位,其中最關鍵的部分就是對圖片的處理,引數的設定,並使之擁有泛化能力。 首先傳入圖片,在進行大規模的圖片處理時,因為無法確定圖片的尺寸,所以需要將原始圖片進行等比例的縮放。 orgimg = cv2.imread('ch
Python+OpenCV影象處理(九)—— 模板匹配
百度百科:模板匹配是一種最原始、最基本的模式識別方法,研究某一特定物件物的圖案位於影象的什麼地方,進而識別物件物,這就是一個匹配問題。它是影象處理中最基本、最常用的匹配方法。模板匹配具有自身的侷限性,主要表現在它只能進行平行移動,若原影象中的匹配目標發生旋轉或大小變化,該演算
C++ Opencv——影象特徵工程(1) AKAZE(opencv3.3.0)
特徵檢測 第一步:檢測器 Ptr<AKAZE> detector = AKAZE::create(); 第二步:檢測器子類—檢測 detector->detect(img, keypoints, Mat()); 計算檢測時間(通用): double t1 =
OpenCV-影象處理(06、調整影象亮度與對比度)
理論 影象變換可以看作如下: 畫素變換 – 點操作 鄰域操作 – 區域 調整影象亮度和對比度屬於畫素變換-點操作 g
OpenCV-影象處理(05、影象混合)
理論-線性混合操作(影象混合有 ·加·減·乘·除·比重 等方式) addWeighted: 1.1 比重公式: g
OpenCV-影象處理(04、影象操作)
讀寫影象 imread 可以指定載入為灰度或者RGB影象 Imwrite 儲存影象檔案,型別由副檔名決定 讀寫畫素 讀一個GRAY畫素點的畫素值(CV_8UC1) Scalar intensity = img.at(y, x); 或者 Scal
OpenCV-影象處理(03、Mat物件)
Mat物件與IplImage物件 Mat物件 OpenCV2.0之後引進的影象資料結構、自動分配記憶體、不存在記憶體洩漏的問題,是面向物件的資料結構。分了兩個部分,頭部與資料部分 IplImage 是從2001年OpenCV釋出之後就一直存在,是C語言風格的資料結構,需
OpenCV-影象處理(02、矩陣的掩膜操作)
1. 獲取影象畫素指標 CV_Assert(myImage.depth() == CV_8U); Mat.ptr(int i=0) 獲取畫素矩陣的指標,索引i表示第幾行,從0開始計行數。 獲得當前行指標const uchar* current= myImage.p
OpenCV-影象處理(01、影象的載入、修改與儲存)
1. 載入影象(用cv::imread) Mat imread(const string& filename,int flags=1) 函式介紹:函式imread返回的值Mat物件,如果讀取檔案失敗,函式會返回一個空矩陣,那麼 srcImage.data 的值是
python+OpenCV影象處理(十)霍夫變換簡單圖形檢測
霍夫變換 霍夫變換(Hough Transform)是影象處理中從影象中識別幾何形狀的基本方法之一,應用很廣泛,也有很多改進演算法。主要用來從影象中分離出具有某種相同特徵的幾何形狀(如:直線、圓等)。最基本的霍夫變換是從黑白影象中檢測直線。 霍夫變換是經典的檢測直線的演算
java-影象處理(1、水印文字 2、水印圖示 3、縮圖 4、裁剪影象)
package imgUtil; import java.awt.Color; import java.awt.Font; import java.awt.FontMetrics; import java.awt.Graphics; import java.awt.image.BufferedImage;
python+OpenCV影象處理(五)影象的閾值分割
影象的閾值處理 一幅影象包括目標物體、背景還有噪聲,要想從多值的數字影象中直接提取出目標物體,常用的方法就是設定一個閾值T,用T將影象的資料分成兩部分:大於T的畫素群和小於T的畫素群。這是研究灰度變換的最特殊的方法,稱為影象的二值化(Binarization)。