
怎麼解決過擬合與欠擬合
一.過擬合
在訓練資料不夠多時,或者over-training時,經常會導致over-fitting(過擬合)。其直觀的表現如下圖所所示。
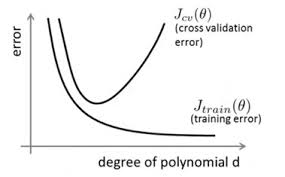
隨著訓練過程的進行,模型複雜度,在training data上的error漸漸減小。可是在驗證集上的error卻反而漸漸增大——由於訓練出來的網路過擬合了訓練集,對訓練集以外的資料卻不work。
在機器學習演算法中,我們經常將原始資料集分為三部分:訓練集(training data)、驗證集(validation data)、測試集(testing data)。
1.validation data是什麼?
它事實上就是用來避免過擬合的。在訓練過程中,我們通經常使用它來確定一些超引數(比方,
2.防止過擬合方法主要有:
1.正則化(Regularization)(L1和L2)
2.資料增強(Data augmentation),也就是增加訓練資料樣本
3.Dropout
4.early stopping
二、正則化
正則化(Regularization)包含L1、L2(L2 regularization也叫權重衰減,weight decay)
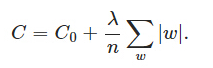
1.L1 regularization
在原始的代價函式後面加上一個L1正則化項,即全部權重w的絕對值的和,再乘以λ/n(這裡不像L2正則化項那樣,須要再乘以1/2)。
先計算導數:
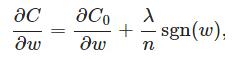
上式中sgn(w)表示 w 的符號,那麼權重w的更新規則為:

比原始的更新規則多出了
當w為正時,sgn(w)>0, 則更新後的w變小。
當w為負時,sgn(w)>0, 則更新後的w變大——因此它的效果就是讓w往0靠,使網路中的權重儘可能為0,也就相當於減小了網路複雜度,防止過擬合。
另外,上面沒有提到一個問題,當w為0時怎麼辦?當w等於0時,|W|是不可導的。所以我們僅僅能依照原始的未經正則化的方法去更新w,這就相當於去掉 η*λ*sgn(w)/n 這一項,所以我們能夠規定sgn(0)=0,這樣就把 w=0 的情況也統一進來了。
(在程式設計的時候,令sgn(0)=0,sgn(w>0)=1,sgn(w<0)=-1)
2. L2 regularization(權重衰減)
L2正則化就是在代價函式後面再加上一個正則化項:
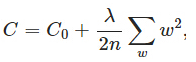
C0代表原始的代價函式,後面那一項就是L2正則化項。它是這樣來的:全部引數 w 的平方和,除以訓練集的樣本大小n。
λ 就是正則項係數,權衡正則項與C0項的比重。另外另一個係數1/2,1/2經常會看到,主要是為了後面求導的結果方便,後面那一項求導會產生一個2,與1/2相乘剛好湊整。L2正則化項是怎麼避免overfitting的呢?我們推導一下看看,先求導:
能夠發現L2正則化項對 b 的更新沒有影響,可是對於w的更新有影響:
在不使用L2正則化時。求導結果中 w 前係數為 1,經變化後w前面係數為 1−ηλ/n ,由於η、λ、n都是正的。所以 1−ηλ/n小於1,它的效果是減小w,這也就是權重衰減(weight decay)的由來。
當然考慮到後面的導數項,w 終於的值可能增大也可能減小。
另外,必須提一下,對於基於mini-batch的隨機梯度下降,w 和 b 更新的公式跟上面給出的有點不同:
對照上面 w 的更新公式。能夠發現後面那一項變了,變成全部導數加和,乘以η再除以m,m是一個mini-batch中樣本的個數。
在此我們僅僅是解釋了L2正則化項有讓w“變小”的效果,可是還沒解釋為什麼w“變小”能夠防overfitting?
一個所謂“顯而易見”的解釋就是:更小的權值w,從某種意義上說,表示網路的複雜度更低,對資料的擬合剛剛好(這個法則也叫做奧卡姆剃刀),而在實際應用中,也驗證了這一點,L2正則化的效果往往好於未經正則化的效果。當然,對於非常多人(包含我)來說,這個解釋似乎不那麼顯而易見,所以這裡加入一個略微數學一點的解釋(引自知乎):
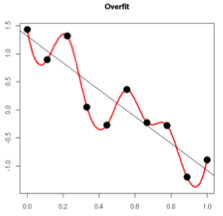
過擬合的時候,擬合函式的係數往往非常大,為什麼?例如以下圖所看到的,過擬合。就是擬合函式須要顧忌每個點。終於形成的擬合函式波動非常大。在某些非常小的區間裡,函式值的變化非常劇烈。
這就意味著函式在某些小區間裡的導數值(絕對值)非常大,由於自變數值可大可小,所以僅僅有係數足夠大,才幹保證導數值非常大。而L2正則化是通過約束引數的範數使其不要太大,所以能夠在一定程度上降低過擬合情況。
3.在什麼情況下使用L1,什麼情況下使用L2?
L1和L2的差別,為什麼一個讓絕對值最小,一個讓平方最小,會有那麼大的差別呢?我看到的有兩種幾何上直觀的解析:
(1)下降速度:
我們知道,L1和L2都是規則化的方式,我們將權值引數以L1或者L2的方式放到代價函式裡面去。然後模型就會嘗試去最小化這些權值引數。而這個最小化就像一個下坡的過程,L1和L2的差別就在於這個“坡”不同,如下圖:L1就是按絕對值函式的“坡”下降的,而L2是按二次函式的“坡”下降。所以實際上在0附近,L1的下降速度比L2的下降速度要快,所以會非常快得降到0。不過我覺得這裡解釋的不太中肯,當然了也不知道是不是自己理解的問題。
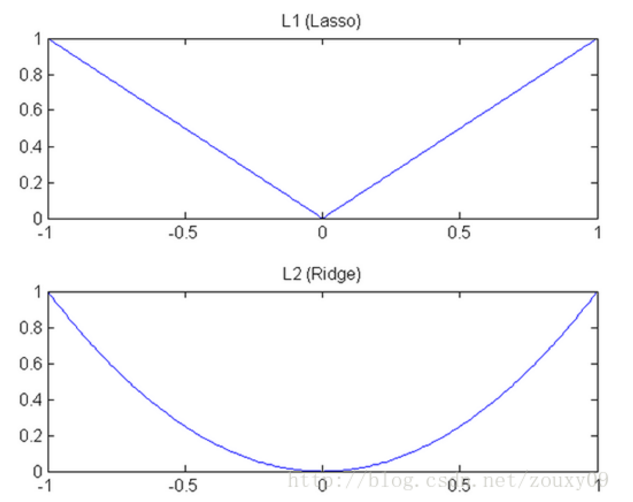
L1稱Lasso,L2稱Ridge。
總結就是:L1會趨向於產生少量的特徵,而其他的特徵都是0,而L2會選擇更多的特徵,這些特徵都會接近於0。Lasso在特徵選擇時候非常有用,而Ridge就只是一種規則化而已。
三. 資料集擴增(data augmentation)
訓練模型有時候不是由於演算法好贏了,而是由於擁有海量的資料才贏了。”
不記得原話是哪位大牛說的了,hinton?從中可見訓練資料有多麼重要,特別是在深度學習方法中,海量的訓練資料,意味著能夠用更深的網路,訓練出更好的模型。
既然這樣,收集大量資料不就OK啦?假設能夠收集很多其它能夠用的資料,當然好。可是非常多時候,收集很多其它的資料意味著須要耗費很多其它的人力物力。尤其在對資料集進行人工標註的同學就知道,效率特別低,簡直是粗活。
所以。能夠在原始資料上做些改動,得到很多其它的資料,以圖片資料集舉例,能夠做各種變換,如:
-
將原始圖片旋轉一個小角度
-
加入隨機噪聲
-
一些有彈性的畸變(elastic distortions),論文《Best practices for convolutional neural networks applied to visual document analysis》對MNIST做了各種變種擴增。
-
擷取(crop)原始圖片的一部分,比方DeepID中,從一副人臉圖中,截取出了100個小patch作為訓練資料,極大地添加了資料集。
感興趣的能夠看《Deep learning face representation from predicting 10,000 classes》.
大量訓練資料意味著什麼?
用50000個MNIST的樣本訓練SVM得出的accuracy94.48%,用5000個MNIST的樣本訓練KNN得出accuracy為93.24%,所以很多其它的資料能夠使演算法表現得更好。
在機器學習中,演算法本身並不能決出勝負,不能武斷地說這些演算法誰優誰劣,由於資料對演算法效能的影響非常大。
四.Dropout
L1、L2正則化是通過改動代價函式來實現的,而Dropout則是通過改動神經網路本身來實現的,它是在訓練網路時用的一種技巧(trike),它的流程例如以下:
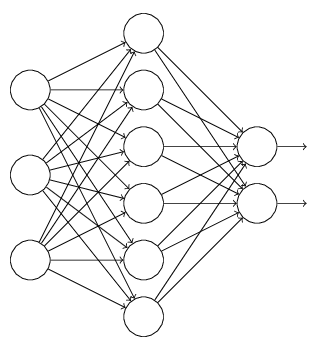
假設我們要訓練上圖這個網路,在訓練開始時,我們隨機地“刪除”一部分的隱層單元,視它們為不存在,得到例如以下的網路:
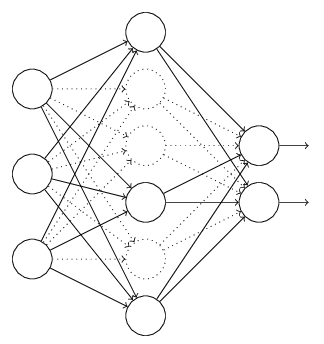
保持輸入輸出層不變,依照BP演算法更新上圖神經網路中的權值(虛線連線的單元不更新,由於它們被“暫時刪除”了)。
以上就是一次迭代的過程,在第二次迭代中,也用相同的方法,僅僅只是這次刪除的那一部分隱層單元,跟上一次刪除掉的肯定是不一樣的。由於我們每一次迭代都是“隨機”地去刪掉一部分。
第三次、第四次……都是這樣,直至訓練結束。
以上就是Dropout,它為什麼有助於防止過擬合呢?能夠簡單地這樣解釋,運用了dropout的訓練過程,相當於訓練了非常多個僅僅有部分隱層單元的神經網路,每個這種半數網路,都能夠給出一個分類結果,這些結果有的是正確的,有的是錯誤的。
隨著訓練的進行,大部分半數網路都能夠給出正確的分類結果。那麼少數的錯誤分類結果就不會對終於結果造成大的影響。
刪除神經單元,不工作,通常keep_prob取0.5
在程式設計時可以利用TensorFlow中 DropoutWrappera函式
在訓練過程引入Dropout 策略,其Dropout層保留節點比例(keep_prob),每批資料輸入時神經網路中的每個單元會以1-keep_prob的概率不工作,防止過擬合。
lstmCell = tf.contrib.rnn.DropoutWrapper(cell=lstmCell, output_keep_prob=0.5)更加深入地理解。能夠看看Hinton和Alex兩牛2012的論文《ImageNet Classification with Deep Convolutional Neural Networks》
五、提前終止(Early stopping)
對模型進行訓練的過程即是對模型的引數進行學習更新的過程,這個引數學習的過程往往會用到一些迭代方法,如梯度下降(Gradient descent)學習演算法。Early stopping便是一種迭代次數截斷的方法來防止過擬合的方法,即在模型對訓練資料集迭代收斂之前停止迭代來防止過擬合。
Early stopping方法的具體做法是,在每一個Epoch結束時(一個Epoch集為對所有的訓練資料的一輪遍歷)計算validation data的accuracy,當accuracy不再提高時,就停止訓練。這種做法很符合直觀感受,因為accurary都不再提高了,在繼續訓練也是無益的,只會提高訓練的時間。那麼該做法的一個重點便是怎樣才認為validation accurary不再提高了呢?並不是說validation accuracy一降下來便認為不再提高了,因為可能經過這個Epoch後,accuracy降低了,但是隨後的Epoch又讓accuracy又上去了,所以不能根據一兩次的連續降低就判斷不再提高。一般的做法是,在訓練的過程中,記錄到目前為止最好的validation accuracy,當連續10次Epoch(或者更多次)沒達到最佳accuracy時,則可以認為accuracy不再提高了。此時便可以停止迭代了(Early Stopping)。這種策略也稱為“No-improvement-in-n”,n即Epoch的次數,可以根據實際情況取,如10、20、30……
六、從資料預處理角度
1.對原始資料通過PCA, t-SNE等降維技術進行降維處理
2.平衡不同類資料的權重等
參考: