
增強學習(一)——馬爾科夫決策過程(MDP)
最近因為研究需要,要開始學習機器學習了。之前只是懂些CNN什麼的皮毛,對機器學習的整體認識都比較缺乏,後面我會從頭開始一點點打基礎,正好也用部落格把自己的學習歷程記錄一下,如果有大牛看到博文中有錯誤,歡迎指正!
增強學習(reinforcement learning,RL)是近年來機器學習和智慧控制領域的主要方法之一。在增強學習中有三個概念:狀態、動作和回報。
“狀態(state)”是描述當前情況的。對一個正在學習行走的機器人來說,狀態是它的兩條腿的位置。對一個圍棋程式來說,狀態是棋盤上所有棋子的位置。
“動作(action)”是一個智慧體在每個狀態中可以做的事情。給定一個機器人兩條腿的狀態或位置,它可以在一定距離內走幾步。通常一個智慧體只能採取有限或者固定範圍內的動作。例如一個機器人的步幅只能是0.01米到1米,而圍棋程式只能將它的棋子放在19×19路棋盤(361個位置)的某一位置。
“回報(reward)”是一個描述來自外界的反饋的抽象概念。回報可以是正面的或者負面的。當回報是正面的時候,它對應於我們常規意義上的獎勵。當回報是負面的時候,它就對應於我們通常所說的懲罰。
因此,增強學習的核心目標就是解決這樣的問題:一個能夠感知環境的自治agent,怎樣學習到最優動作策略π:S->A,它能在給定當前狀態S集合中的s時,從集合A中輸出一個合適的動作a。
在研究用於尋找策略的演算法之前,我們必須充分了解馬爾科夫決策過程(MDP)。
馬爾科夫決策過程(MDP)
在面對許多問題時,馬爾科夫決策過程為我們提供了一種對規劃和行動進行推理的形式。大家應該都知道馬爾科夫鏈(Markov Chain),它與MDP有一個共同性質就是無後效性,也就是指系統的下個狀態只與當前狀態有關,而與更早之前的狀態無關,這一特性為我們增強學習打下了理論基礎。不同的是MDP考慮了動作,即系統下個狀態不僅和當前的狀態有關,也和當前採取的動作有關。
因此MDP可以表示為一個元組(S, A, Psa, R):
- S:所有可能狀態的集合。
- A:針對每個狀態,我們都要做出動作,這些動作的集合就是A。
- Psa:狀態轉換分佈(statetransition distribution),如果我們在狀態s中採取了動作a,系統會轉移到一個新的狀態,狀態轉換分佈描述了轉移到哪個狀態的概率分佈。
- R:回饋函式(rewardfunction),增強學習的核心概念,描述了動作能夠產生的回報。比如Rπ(s,a)描述了在狀態s下采用策略π所對應的動作a的回報,也叫做立即回報,回饋函式可以有不同的表達形式。
但是在選取最優策略的過程中,我們只看立即回報並不能判定哪種策略更優,我們希望的是在採取了策略π以後,可以使得整個狀態序列的折扣回饋最大:
R(s0, a0)+ γR(s1, a1) + γ2R(s2, a2)+ (1)
其中γ被稱為折扣因子,在經濟學上的解釋叫做無風險折現率(risk-freeinterest rate),意思是馬上得到的錢(回饋)比未來得到錢更有價值。
因此,以上概念就組成了增強學習的完整描述:找到一種策略,使得我們能夠根據狀態s0, s1, s2…採取策略中對應的動作a0, a1, a2…,並使公式(1)的期望值最大化,這也叫做價值函式(value function)Vπ: S→R,表明當前狀態下策略π的長期影響。這個函式從狀態s開始,根據π來採取行動:Vπ(s) =Eπ[ R(s0, a0) + γR(s1, a1)+ γ2R(s2, a2) + … | s0= s ]
這個函式也被稱為狀態價值函式(statevalue function),因為初始狀態s和策略π是我們給定的,動作a = π(s)。與之相對應的是動作價值函式(actionvalue function),也叫做Q函式:
Qπ(s, a)= Eπ[ R0 + γR1 + γ2R2 + …| s0= s, a0= a]
其中的初始狀態和初始動作都是我們給定的。
函式最優與求解:
進一步,我們定義了最優價值函式(optimalvalue function)和最優Q函式(optimal Q-function):
V*(s) =maxπ Vπ(s)
Q*(s, a)= maxπ Qπ(s, a)
不難證明,V*和Vπ滿足下面兩個方程:
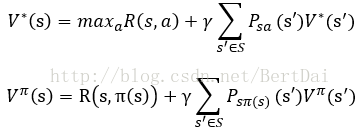
上式稱為最優貝爾曼方程,給出了V*和Vπ的遞迴定義形式,也是V的求解方法。V*的公式說明了通過每一步選取最優的動作a,並在後面的動作中也保持最優,就可以得到V*。Vπ的含義是:如果我們持續根據策略π來選擇動作,那麼策略π的期望回報就是當前的回報加上未來的期望回報。
相似的,下列對於Q函式的方程也成立:
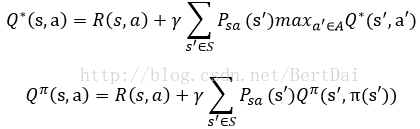
這種遞迴的定義形式也有利於我們在具體實現時的求解。
在知道V*和Q*後,我們可以通過下面的公式來得到最優的策略π*:
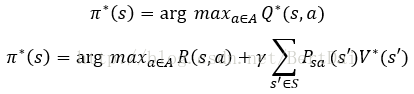
也就是說,如果我們知道了Q*,可以更加方便的計算出最優策略,而要從V*得到最優策略,還必須知道狀態轉換分佈Psa才行。
對於尋找最優策略的具體演算法,包括了價值迭代、策略迭代、蒙特卡洛演算法和Q學習演算法等,後期我會繼續整理。