
微型四軸飛行器(4)通訊設計
阿新 • • 發佈:2019-02-02
通訊方式選擇
如今的四軸飛行器上使用的無線通訊模組有5種大類,WIFI、藍芽、2.4G模組、433M模組、868M模組。Wifi和2.4G其實都是一個頻段,但是wifi是經過了協議封裝的結果,而後者模組僅僅是用於傳輸,並沒有任何協議。綜合考慮下我使用了WIFI。其中棄用藍芽是因為其傳輸距離的確太近,不符合微四軸的使用情況,而其他幾種頻段的通訊則需要一個對等的接收裝置,微型四軸飛行器其中一個理念就是更方便的使用,如果還需要單獨配備一個要看裝置豈不很麻煩。於是最終我選擇了WIFI,主要原因在於使用者可以直接通過手機進行連線操控,並且wifi在通訊距離和資訊承載量也是合格的。這裡我選擇了使用安信可公司的ESP系列wifi模組,原因主要在於其低廉的價格和完善的產品使用資料,並且在以前有足夠的使用經驗。單獨使用模組要有一個好處是可以遮蔽干擾,高頻訊號線會給電路引入干擾,使用模組後隔離開各個板層,使通訊更加穩定。晶片如圖。

該模組工作電壓在3.0V到3.6V間,工作電流80mA左右,頻段只支援2.4GHz到2.5GHz之間。可以通過UART/IIC/HSPI的方式進行通訊。網路協議包含了IPv4,TCP/UDP/HTTP/FTP,管腳如圖。
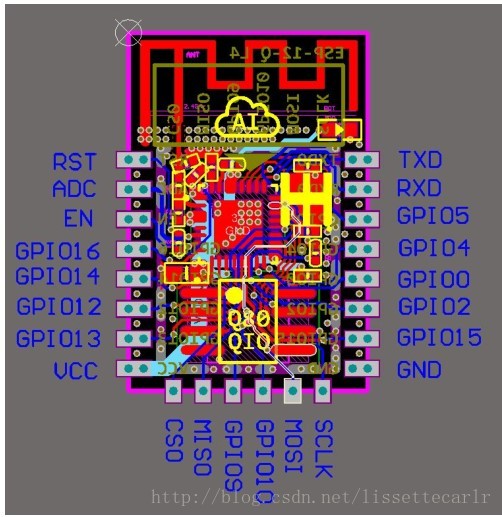
但不使用原廠提供的韌體,而是使用樂鑫公司的透傳韌體,重刷韌體需要改變模組的執行模式,配置GPIO0、GPIO15為低電平並將GPIO2拉為高電平的時候進入下載模式,配置GPIO15為低電平並且將GPIO2和GPIO0拉為高電平的時候進入正常執行模式。韌體更新後,通過連上wifi,瀏覽器進入192.168.4.1進行相應配置,讓該韌體遮蔽底層傳輸,通過串列埠獲取資料後對其連線的第一個裝置傳送UDP資料包,這樣實現透傳假象。但相應的缺點是無法同時連線兩個裝置進行通訊。但對於此係統沒有影響。