
30分鐘內使用手機控制四軸飛行器(ESP8266 + A7105 + Blynk App for iOS/Android)

很久以來,我就想做類似的專案了。但是手機整合工作的複雜性讓我感到害怕。而且如果以後我有新的想法,也很難再重新利用這個專案。
現在,有了Blynk,這一切變得易如反掌:)
因此,我花了一個晚上,完成了這個專案。我希望大家會對這個專案感興趣。
為了讓這個專案正常工作,你需要:
1. 硬體
-
四軸飛行器(無需調整飛行器)
-
ESP8266 模組(ESP-07,ESP-12或者類似的開發板)
-
USB <-> TTL串列埠轉換器(3.3V)
-
麵包板 + 跳線
-
Amic A7105無線收發器模組
2. 軟體
- Blynk App
(在我的指導性檔案中已經包括了安裝過程)
3. 技能
-
可能需要進行簡單的焊接(取決於你使用的硬體)
參考資料和致謝
好的,讓我們開始吧!
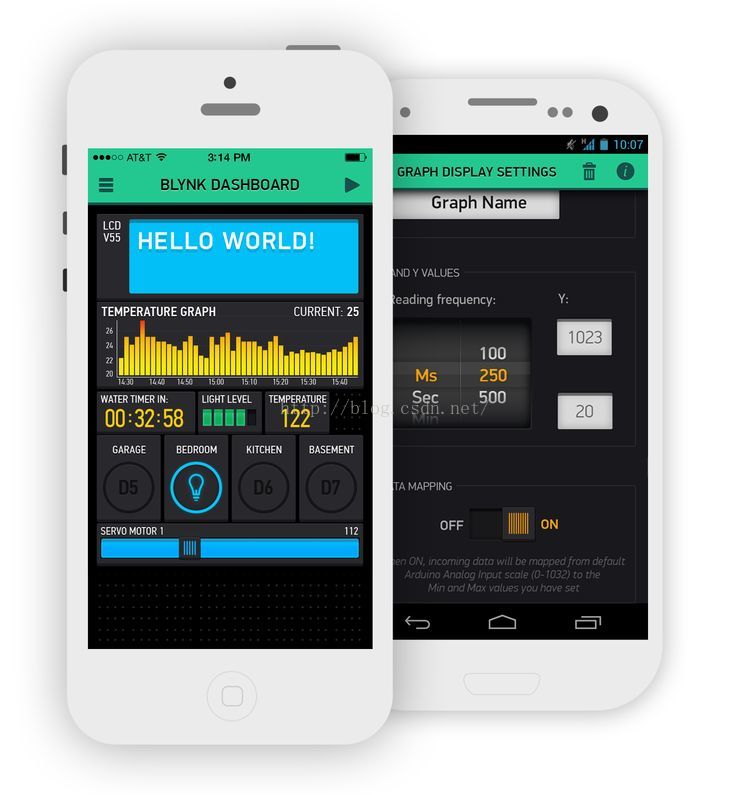
第一步:設定 Blynk 應用程式

每次我使用Blynk 的時候,它都會讓我想起三錄儀。
Tricoder: multifunction hand-held device used for sensor scanning, data analysis, and recording data.
Blynk 帶有不同的部件(比如按鈕、滑動裝置、顯示裝置)。
你可以執行你想要執行的動作。這是一個通用遙控器,也可以顯示和繪製資料。
下面是如何開始的一些簡單步驟:
1. 安裝 Blynk 應用程式:
2. iOS
(iOS 系統的軟體目前還沒有操縱桿配置,但在未來兩週內將新增該配置)
2. 建立 Blynk 賬戶。
按下登入介面的“建立賬戶”按鈕。
(可選步驟)
順便說一下,我們現在是通過 BT 4.0 BLE 、隨後通過WiFi新增直接連線,以清除伺服器連線(專門為類似情況設定)。
第二步:用導線連線 A7105 和 ESP8266
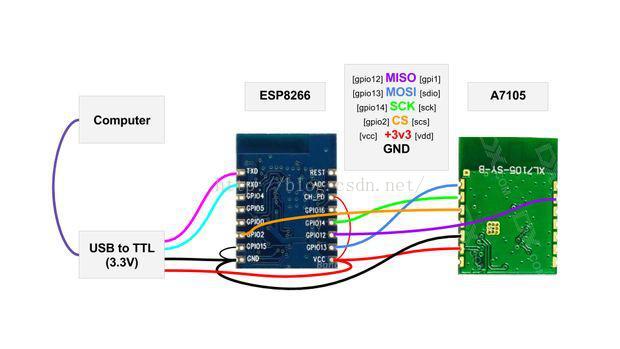
ESP8266 and A7105 的執行電壓都是3.3V,我們無需使用任何變壓器,直接將它們連線起來即可。
順便說一下,這也是我選擇使用 ESP8266的原因之一。另外一個原因就很明顯了: ESP8266 帶有WiFi連線功能。:)
你可能需要焊接少數幾條導線或者使用實驗板確保連線穩定。
第三步:配置 Blynk 專案

1. 建立一個新專案,選擇 ESP8266
2. 按下按鈕,傳送認證令牌到你的郵箱
3. 新增Button部件
將其命名為“Bind”並連線到虛擬管腳1。
設定模式為“Switch”
4. 新增另外一個Button部件
將其命名為“Lights”並連線到虛擬管腳6。
設定模式為“Switch”
5. 新增兩個操縱桿部件,安裝圖示內容配置
提示:你可以通過改變引數值來控制靈敏度/移位。
第四步:編寫程式碼&上傳韌體
我會幫你剩下一些時間:這是一個草圖,你可以按照這個草圖給你的裝置編寫程式:)
事實上,我花了好幾個小時向 ESP8266 上移植和修復原始的coptermanager,每次coptermanager不能正常工作或者崩潰的時候我都百思不得其解^_^
但一旦我成功地讓 ESP8266 和 Hubsan 一起工作,讓 Hubsan X4 和 Blynk 互動就是一件易如反掌的事情了
V1 - COPTER_BIND Binds and returns the copter ID V2 - COPTER_THROTTLE (range 0x00 - 0xFF) throttle (top/down) V3 - COPTER_RUDDER (range 0x34 - 0xCC) rudder (rotate left/right) V4 - COPTER_AILERON (range 0x45 - 0xC3) aileron (drift left/right) V5 - COPTER_ELEVATOR (range 0x3E - 0xBC) elevator (forward/backward) v6 - COPTER_LED (1 or 0) enable/disable LEDs
然後:
1. 在 Arduino IDE中開啟提供的草圖
2. 更新 Blynk 認證令牌(來自email),更新coptermanager.ino資料夾中的WiFi證書
3. 將它上傳到你的 ESP8266中!
第五步:飛起來!

不管你信不信,這樣就搞定啦:)
1. 給你的 ESP8266 上電,確保它連線到 Blynk 伺服器。
2. 給你的Hubsan X4上電。
3. 輕按應用程式中的“Run”按鈕(三角形,位於右上角)
4. 輕按“BIND”按鈕。四軸飛行器上的燈此時應當停止閃爍。非常棒!
5. 使用第二個按鈕嘗試開啟和關閉燈。哇哦!
6. 現在……小心地……把你的手指輕輕地放到這兩個操縱桿上……