
【計算機視覺】opencv靶標相機姿態解算3 根據兩幅影象的位姿估計結果求某點的世界座標 (三維重建)
關鍵詞:相機位姿估計,單目尺寸測量,環境探知
用途:基於相機的環境測量,SLAM,單目尺寸測量
文章型別:原理說明、Demo展示
@Author:VShawn
@Date:2016-11-28
@Lab: [email protected]
前言
早就寫好了....不過doc放在膝上型電腦裡,平時一直都在用桌上型電腦,所以拖到現在才發:(
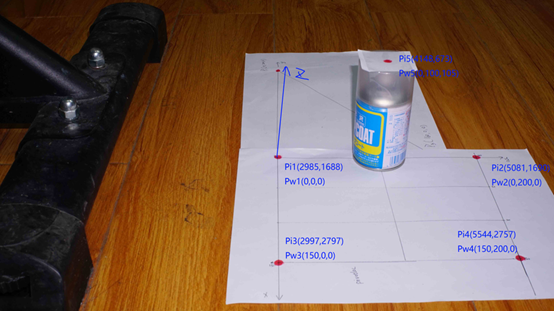
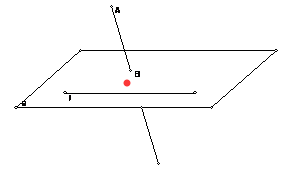
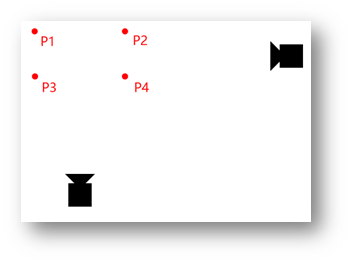
寫了這麼多篇關於位姿估計的部落格後,終於要寫一篇有點用的東西了:本文將展示位姿估計的一種應用,即通過單目相機對環境進行測量。簡單來說,本文的工作就是利用下面的兩幅圖,在已知P1、P2、P3、P4四點世界座標的情況下,計算出P5的世界座標。

該研究的應用範圍很廣,例如對某建築群,可以通過設定幾個已知的標誌點(世界座標已確定),用本文的方法將建築的各個角的世界座標求出來,從而測量出建築的高度,建築間的距離,乃至將整個建築群的環境重構出來。又或者在某個露天貨場,設定好標誌點後只需要無人機飛一圈,就能知道貨場中貨物的體積有多少,從而安排貨運計劃。總之該項應用的前景很大,配合目前很火的無人機應用,可以為生產、研究帶來不少的便利。最後,本文基於前幾篇文章的結果,建議沒有看過我部落格的讀者先讀讀前面的幾篇原理介紹。
原理
在一開始,先設待求點為P。
根據兩條直線確定一個點的原理,在二維平面中只要知道兩條相交直線的方程,就可以解出它們的交點座標。現在假設我們是在二維平面中拍照
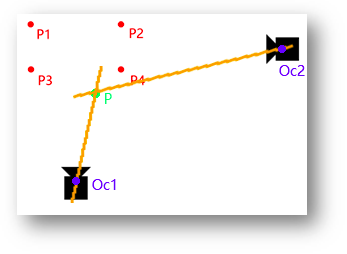
根據文章《相機位姿估計1:根據四個特徵點估計相機姿態》的內容,我們根據P1、P2、P3、P4四點的空間座標,可以估計出兩次拍照的相機位姿Oc1與Oc2,也就知道了相機的座標Oc1與Oc2。那麼將Oc1與P,Oc2與P聯成直線(如上圖的橙色線),則可以獲得兩條直線方程,組成方程組求解得到它們的交點,即為待求點P的座標。
到三維空間中,原理跟二維是一樣的,只是兩條直線從二維空間升到了三維空間成為了兩條空間。通過解PNP求出了相機兩次拍攝的空間位置Oc1、Oc2,在根據P在影象中的座標,可以知道P點在空間中位於相機的哪個方向(將二維影象中的P點用公式對映到三維空間中,需要使用到內參數與外引數矩陣
1.求出P點的相機座標系座標Pc
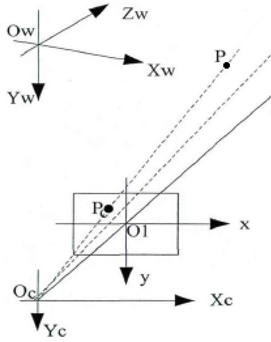
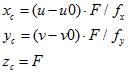
關於P點如何從二維對映到三維,參考上圖,Oc的座標通過解PNP已經求出,待求點P在影象中的畫素座標為(u,v)。根據《影象座標系-相機座標系-世界座標系的關係》(由於懶癌,還沒寫)可以套公式求出P在相機座標系中的座標Pc(也就是上圖中的Pc點)。具體的轉換公式如下,式中F為相機鏡頭的焦距(mm),u、v為點的畫素座標,其餘為相機內參數。
程式碼如下:
程式碼中使用本人封裝好的解PNP問題類解決PNP問題,具體使用方法參見《OpenCV:solvePnP二次封裝與效能測試》。

PNPSolver p4psolver1; //初始化相機引數 p4psolver1.SetCameraMatrix(fx, fy, u0, v0); //設定畸變引數 p4psolver1.SetDistortionCoefficients(k1, k2, p1, p2, k3); p4psolver1.Points3D.push_back(cv::Point3f(0, 0, 0)); //P1三維座標的單位是毫米 p4psolver1.Points3D.push_back(cv::Point3f(0, 200, 0)); //P2 p4psolver1.Points3D.push_back(cv::Point3f(150, 0, 0)); //P3 p4psolver1.Points3D.push_back(cv::Point3f(150, 200, 0)); //P4 //p4psolver1.Points3D.push_back(cv::Point3f(0, 100, 105)); //P5 cout << "特徵點世界座標 = " << endl << p4psolver1.Points3D << endl << endl << endl; //求出圖一中幾個特徵點與待求點P的座標 //cv::Mat img1 = cv::imread("1.jpg"); p4psolver1.Points2D.push_back(cv::Point2f(2985, 1688)); //P1 p4psolver1.Points2D.push_back(cv::Point2f(5081, 1690)); //P2 p4psolver1.Points2D.push_back(cv::Point2f(2997, 2797)); //P3 p4psolver1.Points2D.push_back(cv::Point2f(5544, 2757)); //P4 //p4psolver1.Points2D.push_back(cv::Point2f(4148, 673)); //P5 cout << "圖一中特徵點座標 = " << endl << p4psolver1.Points2D << endl; cv::Point2f point2find1_IF = cv::Point2f(4149, 671);//圖1中待求點P的影象座標系座標 if (p4psolver1.Solve(PNPSolver::METHOD::CV_P3P) != 0) return -1; cout << "圖一中相機位姿" << endl << "Oc座標=" << p4psolver1.Position_OcInW << " 相機旋轉=" << p4psolver1.Theta_W2C << endl; //將P投射到相機座標系,再經過反旋轉求出向量OcP,最終獲得圖1中,直線OcP上的兩個點座標,確定了直線的方程 cv::Point3f point2find1_CF = p4psolver1.ImageFrame2CameraFrame(point2find1_IF, 350);//待求點P在圖一狀態下的相機座標系座標,輸入引數350表示將P投影到350mm外的相機成像平面
2.求出P點在世界座標系中的方向向量
此時我們得到了Pc(xc,yc,zc),但這個點座標是在相機座標系中的,而我們需要知道的其實是P點在世界座標系中對應的座標Pw(xw,yw,cw)。為了將Pc轉為Pw,需要使用到解PNP求位姿時得到的三個尤拉角 。我們知道相機座標系C按照z軸、y軸、x軸的順序旋轉以上角度後將與世界座標系W完全平行(詳見《子座標系C在父座標系W中的旋轉問題》),在這三次旋轉中Pc顯然是跟著座標系旋轉的,其在世界系W中的位置會隨著改變。為了抵消旋轉對P點的影響,保證C系旋轉後P點依然保持在世界座標系W原本的位置,需要對Pc進行三次反向旋轉,旋轉後得到點Pc在相機座標系C中新的座標值記為Pc',Pc'的值等於世界座標系中向量OP的值。那麼Pc'的值+
Oc的世界座標值=P點的世界座標Pw。
。我們知道相機座標系C按照z軸、y軸、x軸的順序旋轉以上角度後將與世界座標系W完全平行(詳見《子座標系C在父座標系W中的旋轉問題》),在這三次旋轉中Pc顯然是跟著座標系旋轉的,其在世界系W中的位置會隨著改變。為了抵消旋轉對P點的影響,保證C系旋轉後P點依然保持在世界座標系W原本的位置,需要對Pc進行三次反向旋轉,旋轉後得到點Pc在相機座標系C中新的座標值記為Pc',Pc'的值等於世界座標系中向量OP的值。那麼Pc'的值+
Oc的世界座標值=P點的世界座標Pw。
程式碼如下(程式碼中變數接上一段程式碼):
double Oc1P_x1 = point2find1_CF.x;//待求點P的相機座標系x座標 double Oc1P_y1 = point2find1_CF.y; //待求點P的相機座標系y座標 double Oc1P_z1 = point2find1_CF.z; //待求點P的相機座標系z座標 //進行三次反向旋轉,得到世界座標系中向量OcP的值,也就是方向向量 PNPSolver::CodeRotateByZ(Oc1P_x1, Oc1P_y1, p4psolver1.Theta_W2C.z, Oc1P_x1, Oc1P_y1); PNPSolver::CodeRotateByY(Oc1P_x1, Oc1P_z1, p4psolver1.Theta_W2C.y, Oc1P_x1, Oc1P_z1); PNPSolver::CodeRotateByX(Oc1P_y1, Oc1P_z1, p4psolver1.Theta_W2C.x, Oc1P_y1, Oc1P_z1); //兩點確定一條直線,a1為Oc的世界座標,a2為P的世界座標Pw cv::Point3f a1(p4psolver1.Position_OcInW.x, p4psolver1.Position_OcInW.y, p4psolver1.Position_OcInW.z); cv::Point3f a2(p4psolver1.Position_OcInW.x + Oc1P_x1, p4psolver1.Position_OcInW.y + Oc1P_y1, p4psolver1.Position_OcInW.z + Oc1P_z1);
上面的程式碼中獲得了一條射線A的兩個端點,其中a1為相機的世界座標系座標,a2為求出的P點對映到世界座標系時的方向向量+相機的世界座標系座標
3.最後,根據兩幅圖得到的兩條直線,計算出P點的世界座標
對另外一幅圖也進行1、2的操作,得到點b1,b2。於是獲得兩條直線A、B,求出兩條直線A與B的交點,大功告成。然而在現實中,由於誤差的存在,A與B相交的可能性幾乎不存在,因此在計算時,應該求他們之間的最近點座標。
根據文章《求空間內兩條直線的最近距離以及最近點的座標(C++)》中給出的GetDistanceOf2linesIn3D類,可以求出兩條直線的交點或者說兩條直線的最近點座標。
程式碼:
/*************************求出P的座標**************************/ //現在我們獲得了關於點P的兩條直線a1a2與b1b2 //於是兩直線的交點便是點P的位置 //但由於存在測量誤差,兩條直線不可能是重合的,於是退而求其次 //求出兩條直線最近的點,就是P所在的位置了。 GetDistanceOf2linesIn3D g;//初始化 g.SetLineA(a1.x, a1.y, a1.z, a2.x, a2.y, a2.z);//輸入直線A上的兩個點座標 g.SetLineB(b1.x, b1.y, b1.z, b2.x, b2.y, b2.z);//輸入直線B上的兩個點座標 g.GetDistance();//計算距離 double d = g.distance;//獲得距離 //點PonA與PonB分別為直線A、B上最接近的點,他們的中點就是P的座標 double x = (g.PonA_x + g.PonB_x) / 2; double y = (g.PonA_y + g.PonB_y) / 2; double z = (g.PonA_z + g.PonB_z) / 2; cout << endl << "-------------------------------------------------------------" << endl; cout << "解得P世界座標 = (" << x << "," << y << "," << z << ")" << endl;
結果
最後解得P點座標為:

P的實際座標為(5,100,105),計算結果的誤差在1mm左右,考慮到繪圖與測量時產生的誤差,以及拍攝的時的視距,這樣的誤差在可接受範圍之內。
應用
將上述理論應用到實際當中,我用130w的工業相機在距離800上對目標拍攝了一系列的圖。
誤差分析
該測量的誤差來源於以下幾個方面:
-
安裝、測量誤差
這個誤差是由於在裝置安裝,以及尺寸測量中所形成的。最典型的比如說在用馬克筆畫點時畫歪了一點,又或在用尺子測量P5點高度時度數不準等。
-
像點座標的選取誤差
這一誤差是在確定幾個點的畫素座標時,取點不準所造成的。不過由於本文用的影象有2000w畫素,因此該誤差不太明顯。若是用100w的影象,該誤差的影響就會被大大增強。
-
兩張拍照位置造成的誤差。
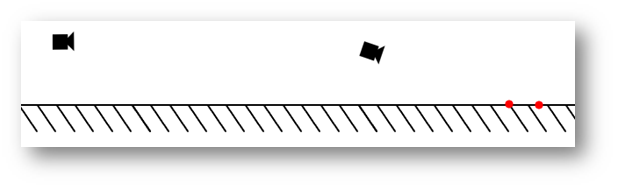
理論上兩次拍照位置相互垂直時,最後計算出來的P點世界座標的誤差最小,如下圖。
但實際情況卻不一定這麼理想,尤其是在處理無人機拍攝的視訊時,可能隔幾幀就進行一次處理,這樣就會帶來較大的誤差,所以最好的辦法是求多組值,取它們的加權平均值。像本文所用的兩幅影象的拍攝角度大概是這樣的:
主檢視:
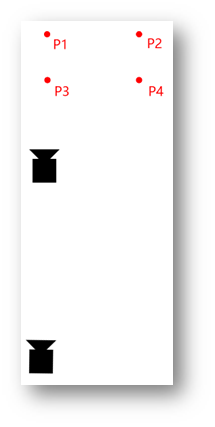
側檢視:
用這兩幅影象處理產生的誤差就會比較大,但最終計算出的誤差也就在1mm左右,能夠接受。用這兩幅圖做實驗是因為作者比較懶惰,直接用了以前拍的圖片,而沒有重新採集影象,好同志不要學。
相關推薦
【計算機視覺】opencv靶標相機姿態解算3 根據兩幅影象的位姿估計結果求某點的世界座標 (三維重建)
關鍵詞:相機位姿估計,單目尺寸測量,環境探知 用途:基於相機的環境測量,SLAM,單目尺寸測量 文章型別:原理說明、Demo展示 @Author:VShawn @Date:2016-11-28 @Lab: [email protected] 前言 早就寫好了....不過doc放在膝
【計算機視覺】opencv靶標相機姿態解算2 根據四個特徵點估計相機姿態 及 實時位姿估計與三維重建相機姿態
https://blog.csdn.net/kyjl888/article/details/71305149 1 基本原理之如何解PNP問題 轉載 基本原理之如何解PNP問題 http://www.cnblogs.com/singlex/p/pose_estimati
相機位姿估計3:根據兩幅影象的位姿估計結果求某點的世界座標_0
關鍵詞:相機位姿估計,單目尺寸測量,環境探知 用途:基於相機的環境測量,SLAM,單目尺寸測量 文章型別:原理說明、Demo展示 @Author:VShawn @Date:2016-11-28 @Lab: [email protected] 目錄 《相機位姿估計
【計算機視覺】opencv姿態解算6 理論演算法調研 PNP問題 5種演算法
3D姿態估計-POSIT演算法 POSIT演算法,Pose from Orthography and Scaling with Iterations, 比例正交投影迭代變換演算法: 用於估計物體的3D姿態(相對於鏡頭的平移和旋轉量)。演算法正常工作的前提是物體在Z軸方向的“厚度”遠小於其在Z軸方向的
【計算機視覺】OpenCV篇(9) - 輪廓(尋找/繪制輪廓)
app oop blank parser gin 邊緣檢測 alt win orm 什麽是輪廓? 輪廓是一系列相連的點組成的曲線,代表了物體的基本外形。 輪廓與邊緣好像挺像的? 是的,確實挺像,那麽區別是什麽呢?簡而言之,輪廓是連續的,而邊緣並不全都連續(見下圖示例)
【計算機視覺】關於用opencv 設定攝像頭讀解析度問題的若干說明
關於用opencv 設定攝像頭讀解析度問題的若干說明 1 問題最初起因 我想充分利用相機高解析度來提高視角,故用opencv直接設定攝像機解析度。不幸的我倒黴出現問題。 VideoCapture類讀AVI視訊可以設定高解析度1294*964,讀攝像頭為啥不能設定1294*
【計算機視覺】 相機姿態估計之標記檢測-ArUco鑽石標記的檢測4
... std::vector<cv::Vec4i> diamondIds; std::vector<std::vector<cv::Point2f>> diamondCorners; // detect diamon diamonds cv::aruco
【計算機視覺】深度相機(一)--TOF總結
TOF技術採用主動光探測方式,與一般光照需求不一樣的是,TOF照射單元的目的不是照明,而是利用入射光訊號與反射光訊號的變化來進行距離測量,所以,TOF的照射單元都是對光進行高頻調製之後再進行發射,比如下圖所示的採用LED或鐳射二極體發射的脈衝光,脈衝可達到100MHz。與普通相機類似,TOF相機晶片前端需要一
【計算機視覺】攝像機標定2 原理篇
轉載 攝像機標定 http://blog.csdn.net/tiemaxiaosu/article/details/51728961 一、概述 1、攝像機標定內容 攝像機標定實際上是要求出6個外引數、5個內參數,即旋轉和平移矩陣 R 和 T 中的三個
【計算機視覺】基於Shading Model(對光照變化一定不變性)的運動目標檢測演算法
光照模型(Shading Model)在很多論文中得到了廣泛的應用,如robust and illumination invariant change detection based on linear dependence for surveillance applic
【計算機視覺】【神經網路與深度學習】YOLO v2 detection訓練自己的資料
轉自:http://blog.csdn.net/hysteric314/article/details/54097845 說明 這篇文章是訓練YOLO v2過程中的經驗總結,我使用YOLO v2訓練一組自己的資料,訓練後的model,在閾值為.25的情況下,Reca
【計算機視覺】影象處理與計算機視覺基礎,經典以及最近發展
在這裡,我特別宣告:本文章的源作者是 楊曉冬 (個人郵箱:[email protected])。原文的連結是 http://www.iask.sina.com.cn/u/2252291285/ish。版權歸 楊曉冬 朋友所有。
【神經網路與深度學習】【計算機視覺】SSD
背景介紹: 基於“Proposal + Classification” 的 Object Detection 的方法,R-CNN 系列(R-CNN、SPPnet、Fast R-CNN 以及 Faster R-CNN),取得了非常好的結果,但是在速度方面離實時效果還比較遠在提高 mAP 的同時兼顧速度,逐
【計算機視覺】PASCAL VOC資料集分析
<annotation> <folder>VOC2012</folder> <filename>2007_000392.jpg</filename>
【計算機視覺】卷積、均值濾波、高斯濾波、Sobel運算元、Prewitt運算元(Python實現)
1.環境的搭建 Python 3.6 OpenCV Open Source Computer Vision Library.OpenCV於1999年由Intel建立,如今由Willow Garage提供支援。OpenCV是一個基於BSD許可(開源
【計算機視覺】雙目測距(六)--三維重建及UI顯示
原文: http://blog.csdn.NET/chenyusiyuan/article/details/5970799 在獲取到視差資料後,利用 OpenCV 的 reProjectImageTo3D 函式結合 Bouquet 校正方法得到的 Q 矩陣就可以得到環
【計算機視覺】【平行計算與CUDA開發】GPU硬解碼---CUVID
問題描述:專案中,需要對高清監控視訊分析處理,經測試,其解碼過程所佔CPU資源較多,導致整個系統處理效率不高,解碼成為系統的瓶頸。 解決思路: 利用GPU解碼高清視訊,降低解碼所佔用CPU資源,加速解碼過程。 一、OpenCV中的硬解碼 OpenCV2.4.6中,
【計算機視覺】【影象處理】幾何變換之仿射變換(平移、縮放、旋轉)
1.概念詞語1)影象的幾何變換 對影象進行放大、縮小、旋轉等操作,會改變原圖中各區域的空間關係,這類操作就是影象的幾何變換。2)仿射變換 對原來的x和y座標分別進行線性的幾何變換,得到新的x和y,這種變換就是放射變換。3)投影變換4)極座標變換5)齊次座標
【計算機視覺】HDR之tone mapping簡介
tone Mapping原是攝影學中的一個術語,因為列印相片所能表現的亮度範圍不足以表現現實世界中的亮度域,而如果簡單的將真實世界的整個亮度域線性壓縮到照片所能表現的亮度域內,則會在明暗兩端同時丟失很多細節,這顯然不是所希望的效果,Tone Mapping就是為了克服這一情況而存在的,既然相片所能呈現的亮度
【計算機視覺】物件距離的平面顯示
想把一些物件的距離關係顯示在圖上,物件特徵是很多維的,而顯示通常用二維平面或三維立體圖。於是先用PCA將特徵降成兩維,然後兩維分別作橫軸和縱軸。這裡PCA用的MATLAB降維工具箱drtoolbox,這樣在平面上的一個關係就可以顯示出來了。mappedX = compute_