
【計算機視覺】物件距離的平面顯示
想把一些物件的距離關係顯示在圖上,物件特徵是很多維的,而顯示通常用二維平面或三維立體圖。於是先用PCA將特徵降成兩維,然後兩維分別作橫軸和縱軸。
這裡PCA用的MATLAB降維工具箱drtoolbox,這樣在平面上的一個關係就可以顯示出來了。
mappedX = compute_mapping(X, 'PCA', 1); load flujet
image(X)
colormap(jet)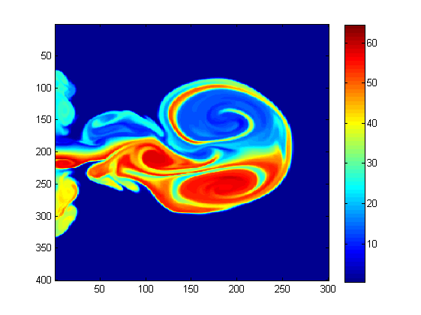 colormap保持圖中點的位置,只是用一個colorbar將原本的資訊(如果是影象就是灰度值)對映到colorbar上面。matlab提供了多種colorbar:
colormap保持圖中點的位置,只是用一個colorbar將原本的資訊(如果是影象就是灰度值)對映到colorbar上面。matlab提供了多種colorbar: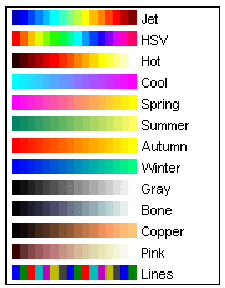
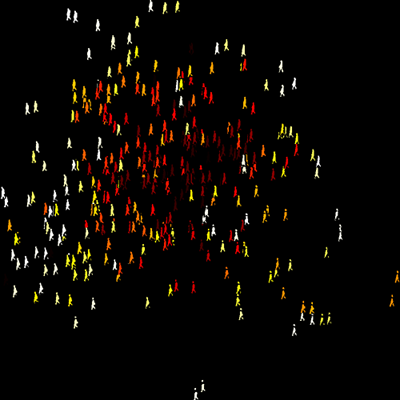
這些colorbar就是n*3的矩陣,可以直接存出來自己用。看我最後的效果:
(轉載請註明作者和出處:http://blog.csdn.net/xiaowei_cqu 未經允許請勿用於商業用途)
相關推薦
【計算機視覺】物件距離的平面顯示
想把一些物件的距離關係顯示在圖上,物件特徵是很多維的,而顯示通常用二維平面或三維立體圖。於是先用PCA將特徵降成兩維,然後兩維分別作橫軸和縱軸。這裡PCA用的MATLAB降維工具箱drtoolbox,這樣在平面上的一個關係就可以顯示出來了。mappedX = compute_
【計算機視覺】雙目測距(六)--三維重建及UI顯示
原文: http://blog.csdn.NET/chenyusiyuan/article/details/5970799 在獲取到視差資料後,利用 OpenCV 的 reProjectImageTo3D 函式結合 Bouquet 校正方法得到的 Q 矩陣就可以得到環
【計算機視覺】opencv靶標相機姿態解算2 根據四個特徵點估計相機姿態 及 實時位姿估計與三維重建相機姿態
https://blog.csdn.net/kyjl888/article/details/71305149 1 基本原理之如何解PNP問題 轉載 基本原理之如何解PNP問題 http://www.cnblogs.com/singlex/p/pose_estimati
【計算機視覺】攝像機標定2 原理篇
轉載 攝像機標定 http://blog.csdn.net/tiemaxiaosu/article/details/51728961 一、概述 1、攝像機標定內容 攝像機標定實際上是要求出6個外引數、5個內參數,即旋轉和平移矩陣 R 和 T 中的三個
【計算機視覺】關於用opencv 設定攝像頭讀解析度問題的若干說明
關於用opencv 設定攝像頭讀解析度問題的若干說明 1 問題最初起因 我想充分利用相機高解析度來提高視角,故用opencv直接設定攝像機解析度。不幸的我倒黴出現問題。 VideoCapture類讀AVI視訊可以設定高解析度1294*964,讀攝像頭為啥不能設定1294*
【計算機視覺】基於Shading Model(對光照變化一定不變性)的運動目標檢測演算法
光照模型(Shading Model)在很多論文中得到了廣泛的應用,如robust and illumination invariant change detection based on linear dependence for surveillance applic
【計算機視覺】【神經網路與深度學習】YOLO v2 detection訓練自己的資料
轉自:http://blog.csdn.net/hysteric314/article/details/54097845 說明 這篇文章是訓練YOLO v2過程中的經驗總結,我使用YOLO v2訓練一組自己的資料,訓練後的model,在閾值為.25的情況下,Reca
【計算機視覺】影象處理與計算機視覺基礎,經典以及最近發展
在這裡,我特別宣告:本文章的源作者是 楊曉冬 (個人郵箱:[email protected])。原文的連結是 http://www.iask.sina.com.cn/u/2252291285/ish。版權歸 楊曉冬 朋友所有。
【神經網路與深度學習】【計算機視覺】SSD
背景介紹: 基於“Proposal + Classification” 的 Object Detection 的方法,R-CNN 系列(R-CNN、SPPnet、Fast R-CNN 以及 Faster R-CNN),取得了非常好的結果,但是在速度方面離實時效果還比較遠在提高 mAP 的同時兼顧速度,逐
【計算機視覺】 相機姿態估計之標記檢測-ArUco鑽石標記的檢測4
... std::vector<cv::Vec4i> diamondIds; std::vector<std::vector<cv::Point2f>> diamondCorners; // detect diamon diamonds cv::aruco
【計算機視覺】PASCAL VOC資料集分析
<annotation> <folder>VOC2012</folder> <filename>2007_000392.jpg</filename>
【計算機視覺】卷積、均值濾波、高斯濾波、Sobel運算元、Prewitt運算元(Python實現)
1.環境的搭建 Python 3.6 OpenCV Open Source Computer Vision Library.OpenCV於1999年由Intel建立,如今由Willow Garage提供支援。OpenCV是一個基於BSD許可(開源
【計算機視覺】opencv姿態解算6 理論演算法調研 PNP問題 5種演算法
3D姿態估計-POSIT演算法 POSIT演算法,Pose from Orthography and Scaling with Iterations, 比例正交投影迭代變換演算法: 用於估計物體的3D姿態(相對於鏡頭的平移和旋轉量)。演算法正常工作的前提是物體在Z軸方向的“厚度”遠小於其在Z軸方向的
【計算機視覺】【平行計算與CUDA開發】GPU硬解碼---CUVID
問題描述:專案中,需要對高清監控視訊分析處理,經測試,其解碼過程所佔CPU資源較多,導致整個系統處理效率不高,解碼成為系統的瓶頸。 解決思路: 利用GPU解碼高清視訊,降低解碼所佔用CPU資源,加速解碼過程。 一、OpenCV中的硬解碼 OpenCV2.4.6中,
【計算機視覺】【影象處理】幾何變換之仿射變換(平移、縮放、旋轉)
1.概念詞語1)影象的幾何變換 對影象進行放大、縮小、旋轉等操作,會改變原圖中各區域的空間關係,這類操作就是影象的幾何變換。2)仿射變換 對原來的x和y座標分別進行線性的幾何變換,得到新的x和y,這種變換就是放射變換。3)投影變換4)極座標變換5)齊次座標
【計算機視覺】HDR之tone mapping簡介
tone Mapping原是攝影學中的一個術語,因為列印相片所能表現的亮度範圍不足以表現現實世界中的亮度域,而如果簡單的將真實世界的整個亮度域線性壓縮到照片所能表現的亮度域內,則會在明暗兩端同時丟失很多細節,這顯然不是所希望的效果,Tone Mapping就是為了克服這一情況而存在的,既然相片所能呈現的亮度
【計算機視覺】opencv靶標相機姿態解算3 根據兩幅影象的位姿估計結果求某點的世界座標 (三維重建)
關鍵詞:相機位姿估計,單目尺寸測量,環境探知 用途:基於相機的環境測量,SLAM,單目尺寸測量 文章型別:原理說明、Demo展示 @Author:VShawn @Date:2016-11-28 @Lab: [email protected] 前言 早就寫好了....不過doc放在膝
【計算機視覺】目標檢測方法彙總
1、 選擇性搜尋:方法:滑動視窗,規則塊(利用約束進行剪枝)、選擇性搜尋(自底向上合併相鄰的重疊區域) 一步步計算相似度 並且合併、剔除相似度的高的 OverFeat: 核心思想: 1) 區域提名;多尺度滑動 2) 分類和定位:CNN來做分類和預測邊框位置 與AlexNet
【神經網路與深度學習】【計算機視覺】Fast R-CNN
先回歸一下: R-CNN ,SPP-net R-CNN和SPP-net在訓練時pipeline是隔離的:提取proposal,CNN提取特徵,SVM分類,bbox regression。 Fast R-CNN 兩大主要貢獻點 : 1 實現大部分end-to-end訓練(提proposal階段除外):
【計算機視覺】ImageNet介紹
ImageNet介紹ImageNet 是一個計算機視覺系統識別專案, 是目前世界上影象識別最大的資料庫。是美國斯坦福的電腦科學家,模擬人類的識別系統建立的。能夠從圖片識別物體。ImageNet是一個非常有前景的研究專案,未來用在機器人身上,就可以直接辨認物品和人了。