
Graph matching 圖匹配演算法分析
概述
原文:《An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency》
上一步我們進行了線特徵的提取和描述,接下來我們進行線特徵的匹配。在此之前我們先通過預處理將一些明顯無法匹配的特徵給消除,以降低圖匹配問題的維度。
該部分圖匹配演算法分為三步:
- 查詢候選匹配對
- 構建關係圖
- 生成最終匹配結果
1. 查詢候選匹配對
匹配的雙方,我們分別稱為參考影象和查詢影象,檢測出雙方的LineVecs之後,我們要檢測他們的一元幾何屬性
1.1.一元幾何屬性
線段的一元幾何屬性就是LineVecs的方向,在同一個LineVec中的線具有相同的方向,並且每一個LineVec擁有唯一的方向。但是兩張圖中的LineVecs的方向有可能是不可靠的,影象有可能會有任意角度的旋轉,對於這點,我們利用影象對之間存在的近似全域性旋轉角,可以減少候選匹配對的數目。
構建旋轉
和其他文章中使用對應匹配來進行影象旋轉不同,LBD的Matching中通過計算兩個影象的LineVecs方向直方圖,得到規範化直方圖

 的角度,通過公式
的角度,通過公式 尋找一個全域性近似旋轉角
尋找一個全域性近似旋轉角 。
。
而全域性旋轉變換不一定總是好的,所以我們也需要去檢查估計旋轉角是不是真的。實際上如果透視變換可以通過旋轉來近似,那麼直方圖之差
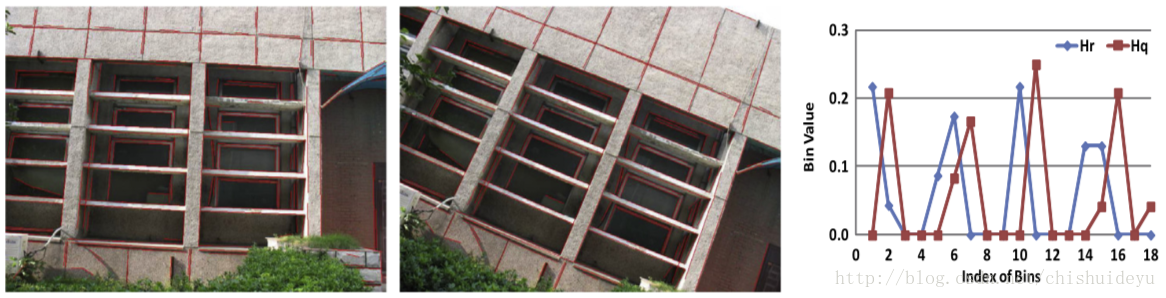
上圖就顯示出了兩張圖之間的直方圖差距,通過旋轉我們可以得出兩張圖之間相似度很高。上圖中的預估角度
但是如果影象中提取的線重複度很低的話,這種直方圖方法就有可能提取出錯誤的旋轉角度。為了解決這個問題,對於在方向直方圖上落入相同區間bins的線段,將他們的長度累積起來。那麼我們就可以得到一個長度向量,其第i個元素就是方向直方圖中第i個bin中的線段累計長度。
我們設定最小偏移直方圖小於閾值th,並且最小偏移長度向量距離小於閾值tl時,我們接受我們所估計的全域性旋轉角。一旦全域性旋轉角被接受,就會有一對LineVecs被匹配。但是如果這對LineVecs的方向角度和估計的全域性旋轉角之差超過閾值
1.2. 區域性外觀相似性
我們用直線描述符之間的距離(lost)來度量區域性外觀相似度。
對於LineVec中的每個線段,我們都從提取出線的尺度層中生成一個LBD描述子向量V。當我們對一幅影象中提取出來的兩組LineVec進行匹配,要去評估參考LineVec和測試LineVec中所有描述子之間的距離,並且用最小的描述子距離去測量LineVec外觀相似度s。如果 s > ts s大於區域性外觀不相似容忍度,那麼相應兩個LineVecs將不會再進一步考慮。
在檢查了LineVecs的一元幾何屬性和區域性外觀相似性之後,通過了這些測試的直線對被當做候選匹配。我們在上面的測試中,應當選取一組鬆散閾值,其中經驗值是 tθ=π/4 ts=0.35。候選匹配的數量比實際匹配的數量要大很多,因為我們不能僅僅按照剛才兩個屬性來確定最終的匹配結果,當然我們上面的工作也是大大減小了圖形匹配的問題維度的。
2. 構建關係圖
對於上面得到一組候選匹配項,我們要構建一個關係圖
其中關係圖裡的節點代表潛在的對應點
節點之間的連線的權重代表對應點之間的一致性。
拿到了k對對應關係,我們用一個大小為k*k的鄰接矩陣A來表示關係圖,其中第i行第j列的元素值是候選LineVec匹配對
成對幾何屬性

我們選擇兩條線分別是




Ij和Pj的值可以用相同的方法求解得到,
外觀相似度
之前,我們使用LBD描述向量來表示線的區域性外觀。
假設描述子與r圖(參考圖)和q圖(查詢圖)的LineVecs



計算一致性得分Aij:


其中是

接下來我們設
3. 生成最終匹配結果
到這一步之後,匹配的問題最終就變成了,尋找匹配簇LM,該匹配簇可以最大化總的一致性分數


其中x受制於對映約束。一般來說用二次規劃來解決這個問題太耗費資源,我們採用譜圖技術,對x放款對映約束和積分約束,使得他的元素可以採集實際值在[0,1]區間裡。
通過Raleigh比率定理,可以最大化
以下是演算法細節:
- 通過EDLine演算法從參考圖和查詢圖內提取LineVecs,以從兩幅圖中分別獲得兩組LineVecs
- 利用兩組LineVecs的方向直方圖估計影象對的全域性旋轉角
- 計算兩組LineVecs的LBD描述子
- 通過檢查描述子的一元幾何屬性和區域性外觀,生成一組候選匹配對
- 根據候選匹配對中一致性分數,構建k*k大小的鄰接矩陣
- 通過使用ARPACK庫,得到鄰接矩陣A的主特徵向量x*
- 初始化匹配結果
- 查詢
,如果x*(a)=0,那麼停止查詢返回匹配結果LM,否則設
,
且x*(a)=0。
- 檢查CM中所有的候選者,如果
衝突,那麼設
- 如果CM是空的,那麼返回LM,否則返回到步驟8。

最後一行的線段匹配可以從LineVecs LM的匹配結果直接檢索。注意,在LineVec的線位於影象的同一區域,並且具有同一方向,因此,每對linevec的匹配,線段匹配有一對就足夠檢索了。