
樹莓派搭建 ROS 系統下四論驅動車,並用 IPad, 手機控制
阿新 • • 發佈:2019-02-06
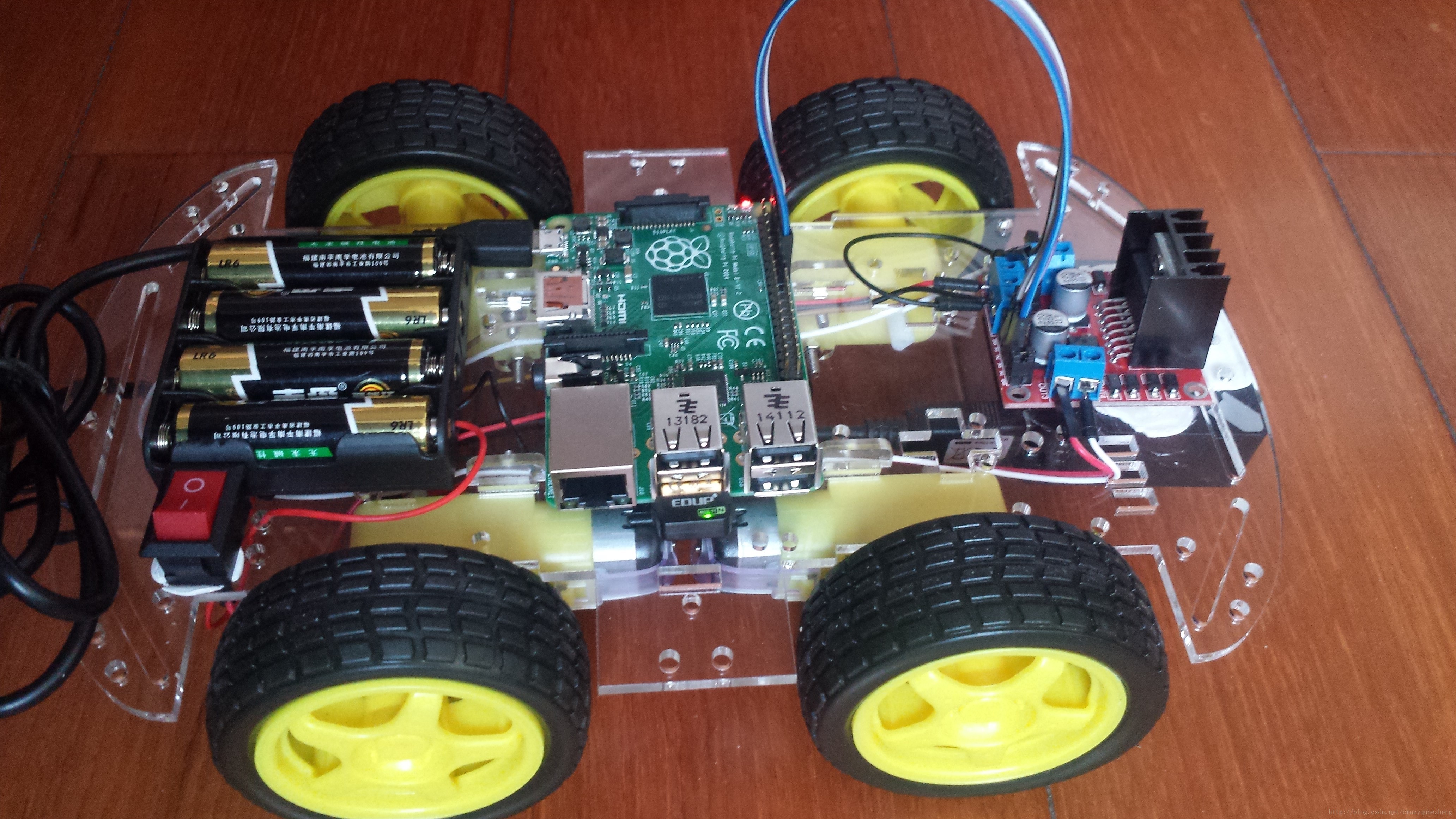
使用樹莓派在安裝了ROS後,按照ROS的架構可以開發一個簡單的四輪驅動Wifi小車:如圖。
<iframe height=498 width=510 src="http://player.youku.com/embed/XODY2MTM2MDA4" frameborder=0 allowfullscreen></iframe>
配件說明
- 雙向電機馬達 X4
- 樹莓派B+ X1
- 雙路轉向控制晶片 X1
- 萬向輪 X4
- 五號電池盒 充電寶 各一個
- 麵包板一個
- 底盤支架1套
重點說明
這裡需要4節電池對馬達進行直接供電,馬達伺服電機雖然可以輸出5V穩定電壓,但是無法給樹莓派供電。所以要搭載一個充電寶對樹莓派供電。電池和充電寶需要共地!
硬體連線
- 左右兩排輪子,每排2個輪子要並聯
- 轉向控制晶片的兩路輸出要並聯到兩排輪子上
- 轉向控制晶片的GND連線到樹莓派gpio的一個GND
- 轉向控制晶片四路輸入連線到樹莓派gpio的4個PIN上
軟體開發
這個是重點,輪子的轉速和轉向通過PWM實現。IPAD的控制是用Tornado Web伺服器實現的,python程式碼本身既是Web伺服器也是 ROS的一個node,接收前端的POST請求後傳送ROS訊息到馬達控制node.
前臺是HTML5的一個控制檯,可以實現前行,後退,左右轉向,原地轉向指令的POST等。
ROS框架下的node和msg設計非常適合機器人感測器的分散式開發。
後記
本次實驗使用樹莓派和ROS的原因是為以後的智慧掃地機器人作鋪墊。ROS已經集成了SLAM導航以及室內地圖自動生產功能,對機器人走遍室內每個角落是個很重要的。