
ROS 不能再詳細的安裝教程16.04+kinetic
#####此文大部分為轉載內容,在此對原博主表示衷心的感謝#####
#####本文主要根據個人安裝過程中遇到的一些問題以及解決方法作一些補充。#####
關於ROS(Robot OS 機器人作業系統),估計看這個博文的大兄弟之前已經都知道是啥了,我就不咋呼了...
對於ROS的安裝,在它的官方網站: http://wiki.ros.org/ROS/Installation 中也有詳細說明。但是對於像博主這樣先天英語發育不全的人來說,直接看官網還是有點困難的。
所以博主痛定思痛,經過一番嘔心瀝血與含辛茹苦的調研後(其實就是看了幾篇相關部落格),終於在博主的電腦上成功安裝了ROS,下面就是博主安裝的全過程及所遇到的坑坑包包...
1 版本選擇
ROS 雖說也叫作業系統,但它是寄生在 Linux 作業系統之下的,所以要求大兄弟你的電腦裡至少要先有一個 LINUX 作業系統。
而對 ROS 相容性最好的當屬 Ubuntu 作業系統了,所以大兄弟,嘿嘿嘿,你自己看著辦!
首先有一點需要說明,ROS是用來幹“大事業”的,所以不推薦也不認同更不接受大家使用虛擬機器。之前博主抱著玩一玩ROS的態度,在虛擬機器裡裝了Ubuntu, 然後裝ROS,結果,結果,結果被ROS給玩了...
1.1 Ubuntu 和 ROS 版本對應
即便是大兄弟用了Ubuntu,也是不能隨便找一個版本的ROS裝滴...
為啥呢,因為 Ubuntu 和 ROS 都是存在不同的版本滴,而且ROS各個版本之間還很接地氣的(誰說的,打死他)互不相容,所以每一個 ROS 版本都對應著一個或兩個對應的 Ubuntu 版本。
具體咋對應的?請看:
| ROS釋出日期 | ROS版本 | 對應Ubutnu版本 |
| 2016.3 |
ROS Kinetic Kame |
Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 |
ROS Jade Turtle |
Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 |
ROS Indigo Igloo |
Ubuntu 14.04 (Trusty) |
| 2013.9 |
ROS Hydro Medusa |
Ubuntu 12.04 LTS (Precise) |
| 2012.12 |
ROS Groovy Galapagos |
Ubuntu 12.04 (Precise) |
| ... | ... | ... |
所以大兄弟,看到了吧,如果系統版本和ROS版本不對應,那是萬萬裝不上滴。。。博主此處已嫩牛滿面。。。
1.2 博主的配置
據博主的不完全統計(壓根就沒統計)的資料顯示,現在學ROS的兄弟們普遍安裝的是 Indigo 和 Hydro 版本, 但是現在已經時2016年啦,新的一年就要有新氣象,所以,博主就能別人所不能(呵呵),安裝了Kinetic。
具體配置如下:
華碩筆記本 + Windows 10 + Ubuntu 16.04 雙系統
- Ubuntu 硬碟大小: 100G
- 記憶體: 8G
- 顯示卡: 也不是用來打dota, 所以隨便啦啦啦~\(≧▽≦)/~啦啦啦
Ros版本:ROS Kinetic Kame
博主分別用過 Indigo 和 Kinetic,其實在使用過程中差距並不大,除了極少數第三方庫,只支援 Indigo版本,畢竟 Kinetic 剛剛釋出,存在一些第三方庫還沒有及時跟進啦。。。
2 開始安裝
既然選定好版本,我們就開始安裝啦!
前提還是大兄弟已經自己安裝好了 Ubuntu 16.04 哦!如果是 Ubuntu 14.04,只需要把下面所有出現 *-kinetic-* 的地方換成 *-indigo-* 就好了。
2.1 軟體中心配置
首先開啟軟體和更新對話方塊,具體可以在 Ubuntu 最左上角的搜尋按鈕中搜索。
開啟後按照下圖進行配置(確保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
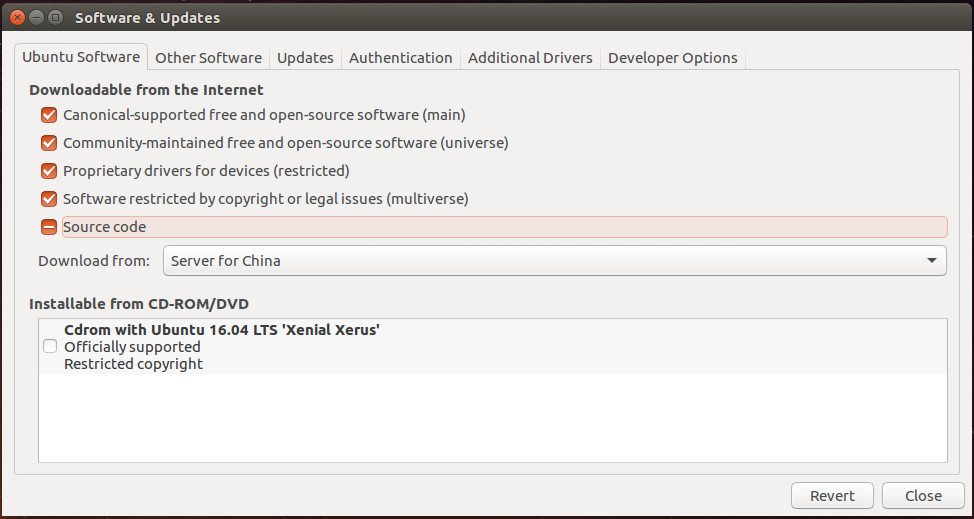
配置完成後就可以關閉該視窗了。
2.2 新增源
開啟一個控制檯(Ctrl + Alt + T), 輸入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
設定祕鑰:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 安裝 ROS
首先確保系統軟體處於最新版
$ sudo apt-get update
然後我們就可以安裝 ROS 啦,但是問題又出現了,ROS kinetic 也有很多版本,比如工業版,基礎版,高階版,豪華版,至尊豪華...
既然我們想要學習ROS,那就安裝至尊豪華全功能版吧,指令如下:
$ sudo apt-get install ros-kinetic-desktop-full
好,打完指令,就可以整瓶啤酒,擼個烤串,看看電視消遣消遣,坐等ROS安裝完成。
如果大兄弟家的網夠快的話,沒準分分鐘就完事兒了。。。
...3...
...2...
...1...
倒數三個數,好,現在就當大兄弟安裝完了,而且一切順利,沒有小蟲子(BUG)粗現...
安裝完成後,可以用下面的命令來檢視可使用的包:
$ apt-cache search ros-kinetic
到現在,雖然是安裝完了,但是還不能用ROS哦,大兄弟彆著急,心急吃不到豆腐...哦,是吃不到熱豆腐...
2.4 初始化ROS
首先呢,需要先初始化 rosdep,嗯?這是啥?這不就是那個啥嘛,對吧,哈哈哈。。。⊙﹏⊙b汗
具體如下:
$ sudo rosdep init $ rosdep update
##在初始化過程中可能出現以下問題,重複主要為了增加關鍵詞##
##
sudo: rosdep:找不到命令
sudo: rosdep:找不到命令
sudo: rosdep:找不到命令
sudo: rosdep:找不到命令
sudo:rosdep:command not found
sudo:rosdep:command not found
sudo:rosdep:command not found
sudo:rosdep:command not found
##
問題如下:
[email protected]:~$ sudo rosdep init
sudo: rosdep:找不到命令
儘管我找到了這個package,但是卻找不到這個命令
[email protected]:~$ apt-cache search rosdep
python-rosdep - rosdep package manager abstrction tool for ROS
python3-rosdep - rosdep package manager abstrction tool for ROS
然後我就不用超級使用者許可權再次試了一下,結果如下:
[email protected]:~$ rosdep init
程式“rosdep”尚未安裝。 您可以使用以下命令安裝:
sudo apt install python-rosdep
於是我將信將疑重新安裝一次,就可以了。
[email protected]:~$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
然後初始化環境變數:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc $ source ~/.bashrc
上面兩句非常非常非常重要,很多小夥伴在日常的開發過程中,有的找不到 Package, 找不到node, 很多情況下都是沒有新增source, 這裡展開說就有點跑偏了,如果小夥伴們遇到問題,可以在留言中提出來...
##如果bush不到,博主自己第一次就失敗了,重新來過一邊就好,保證網路暢通安裝成功##
最後呢,對,這是最後的最後了,安裝一個非常常用的外掛:
$ sudo apt-get install python-rosinstall
好,到這裡,所有安裝就都完事啦。。哈哈哈。。為了保險,重啟一下,測試測試我們的ROS吧....
對了,這裡要提醒一下,ros中很多的第三方外掛的安裝格式是:
$ sudo apt-get install ros-kinetic-... 例如: $ sudo apt-get install ros-kinetic-turtlebot*
3 測試ROS
安裝完了好歹要測試一下吧,不然怎麼對的起那瓶啤酒啊...大兄弟,你還清醒嗎...
首先,啟動ROS環境
$ roscore
看看顯示 started core service [/rosout] 了沒有?如果沒問題,恭喜大兄弟,你成功了。
什麼?出問題了?那好吧,估計是啤酒喝多了,再從頭來一遍吧,這次就別喝了。。。
這裡連結一下我總結的ROS指令字典,大兄弟今後想查什麼指令,直接看這個就好了
相關推薦
ROS 不能再詳細的安裝教程16.04+kinetic
#####此文大部分為轉載內容,在此對原博主表示衷心的感謝##### #####本文主要根據個人安裝過程中遇到的一些問題以及解決方法作一些補充。##### 關於ROS(Robot OS 機器人作業系統),估計看這個博文的大兄弟之前已經都知道是啥了,我就不咋呼了...
解除安裝 Ubuntu 16.04 Kinetic版本ROS
需要先解除安裝ros-indigo-desktop-full: sudo apt-get remove ros-kinetic-desktop-full 上述命令只是刪除ros-indigo-desktop-full而已,並沒有刪除gazebo7和預設的依賴庫。需要
ubuntu-16.04 詳細安裝教程(圖文)附下載地址
安裝準備 下載地址 ubuntu-16.04 下載地址: Ubuntu 16.04 LTS官方映象下載: Ubuntu 官方映象更新,如果下載不到請到官網列表選擇 idea工具大全 IDEA13-15版本 虛擬機器安裝 VMware Workstation
轉:VMware 12 安裝Ubuntu 16.04 (圖文教程)
1 環境準備: (1) 原系統為WIN8,已正確安裝虛擬機器VMware Workstation Pro. (2) 下載Ubuntu系統 a. 進入連結http://www.ubuntu.org.cn/download/desktop.
VMware Workstation12安裝Ubuntu 16.04和VMware Tools教程
之前我安裝Ubuntu16.04,但是每次安裝的時候沒有什麼問題,就是安裝好了Tools,也設定好了共享資料夾,但是在路徑:/mnt/hgfs 下每次都找不到共享資料夾。後來我研究了好久,應該是安裝的時候出了問題。下面是正確可行的安裝方法: 一、下載Ubuntu映象:
Win 10下UEFI環境下安裝Ubuntu 16.04 雙系統教程以及裝好後出現的問題的解決
前言最近打算學習Linux,打算裝雙系統,用的是Ubuntu16.04 ,這個版本是目前比較穩定的一個版本。我的安裝過程比較曲折,好吧,主要問題還是在引導這裡,期間手賤誤刪了D盤,心痛一整天。不過就當做來了一次清理,也沒啥重要的軟體資料只不過太就沒備份了。雙系統前面的安裝基本
UEFI啟動模式下安裝Ubuntu 16.04教程
前言 最近常幫人安裝Ubuntu,也算積累了一些經驗。這篇博文主要談一談如何在UEFI啟動模式下正確安裝Ubuntu 16.04,以形成Windows 10和Ubuntu 16.04的雙系統。 隨著UEFI的普及,現在新出的膝上型電腦幾乎都是支援UEFI的
win10+ubuntu16.04 雙系統詳細安裝教程
http://zhidao.baidu.com/link?url=eMd-72Tfkdt6lad5dHHVNEHGl1w3V5zVvHERCZSeGisaExIkBOFiWh_nGrqlIAk4Iii_3dy1LwICJu3p21TgA_
Win10下UEFI環境安裝Ubuntu 16.04雙系統教程
前言 學習使用Linux難免會安裝Ubuntu系統,而Ubuntu 16.04則是目前比較穩定的版本深受好評。 Win7下安裝雙系統,如果沒有對空間什麼特殊要求,直接在Ubuntu系統安裝的時候選擇與Win7系統共存的選項,一路“下一步”即可。 而
VMware 12 安裝Ubuntu 16.04 (圖文教程)
2 安裝過程: 2.1 VMware新增虛擬機器 (1) 雙擊開啟VMware虛擬機器,選擇“建立新的虛擬機器”; (2) 選擇“自定義(高階)”,點選“下一步”; (3) 預設選項
使用U盤安裝ubuntu 16.04簡易教程
(1):首先我們已經把ubuntu系統放入U盤,成功製作U盤啟動盤,因為我的電腦是thinkpad T430,開機會一直點按F12,會進入啟動選項,然後選擇使用U盤啟動即可,(不同廠商電腦進入按鍵不一定相同,根據個人可以百度進行查詢)進入介面後,有兩個選項,試用ubuntu
Ubuntu16.04的Opencv原始碼安裝3.2.0 和 3.0.0-alpha詳細安裝教程
教程1: Opencv3.0.0-alpha在ubuntu16.04的安裝 # step 1 # 安裝依賴 (太多了,自己相應替換) sudo apt-get -y install libopencv-dev build-essential cmake
Python3.6 和 Pycharm 詳細安裝教程
python pycharm一.Python3.61.下載Python安裝包 https://www.python.org/ 2.安裝Python 2.1.雙擊安裝,勾選下面兩項,選擇自定義安裝2.2.此處默認,直接下一步2.3.選擇安裝路勁,開始安裝2.4.安裝完成3.運行PythonPython3.6
[Mini2440] 使用 VMware 安裝 Ubuntu 16.04
虛擬機 技術分享 mil 使用 下載百度 直接 min pan png 一、安裝 VMware 虛擬機軟件 下載 VMware 軟件,直接百度一下,下載百度軟件中心的就可以了。 安裝的時候直接默認方式安裝就可以了,激活的話,百度一下也都有了。 [Min
U盤安裝Ubuntu 16.04出現:Failed to load ldlinux.c32
u盤啟動 ins tps failed target als spa span b- 啟動的時候如果不開啟UEFI,則會提示: Failed to load ldlinux.c32 Boot failed: please change disks and press
中興新支點桌面操作系統在虛擬機上詳細安裝教程
中興新支點 桌面操作系統 安裝教程 最近想安裝一個中興新支點桌面操作系統來玩玩,可是在網上沒有看到相關教程。然後就一個人按照網上眾多大神分享的其他安裝步驟摸索了一下,然後在這裏跟大家分享一下。如果有什麽不對的,還請各位大神指點指點。一、安裝環境Windows7操作系統物理機VMware Works
VMWare安裝Ubuntu 16.04
激活碼 鏡像 詳細 station www 位置 bit tar 進入 1、Ubuntu安裝文件下載 到Ubuntu官網下載安裝包,有Bit Torrent、Network installer多種方式下載。 推薦使用中國地區的鏡像下載,我是用華科的校園網下載速度是非常感人的
Ubuntu下Docker詳細安裝教程
為什麼要用docker,只有用過的人才知道有多爽,研究了幾天,在centos下安裝總會出現各種問題,新手建議使用Ubuntu,用下面的步驟安裝成功,親歷為證。 以下內容根據 官方文件 修改而來。 如果你過去安裝過 docker,先刪掉: sud
Jenkins詳細安裝教程
查看 得到 運行 con image dmi 直接 jenkin oca 1.先下載msi文件 Jenkins下載鏈接: https://pan.baidu.com/s/1SACKNgW7OZrJoXMRDhsJxQ 提取碼: 94b9 2.安裝
git下載教程、詳細安裝教程
1、百度git 2、點選Git - Downloads進入下載頁面 3、選擇Windows,點選進入 4、選擇64-bit Git for Windows Setup. 詳細安裝教程: https: