
高通sensor架構例項分析之三(adsp上報資料詳解、校準流程詳解)
本系列導航:
從adsp獲取資料的方法分為同步、非同步兩種方式,但一般在實際使用中使用非同步方式,因為同步獲取資料會因外設匯流排速率低的問題阻塞smgr,降低效率,增加功耗。
Sensor上報資料的方式分為如下幾種
sync 同步資料上報,(每次上報一個數據)
async 非同步資料上報,每次請求之後不阻塞,定時檢視狀態,(收到一個數據即上報)
self-scheduling 非同步資料上報,每次請求之後不阻塞,等待中斷或定時檢視狀態,(收到一個數據即上報)
FIFO 非同步資料上報,每次請求一組資料,當感測器資料累積設定水位,由水位中斷觸發一組資料上報。
S4S(Synchronization for Sensors) 用來同步時鐘,避免資料遺漏或同一資料被取兩次
在實際使用中歸納起來分成3種方式:
1, (Polling)0x00同步方式[sync]:smgr向感測器請求資料,阻塞等待資料到來再返回;非同步方式[async]:呼叫一次get_data後啟動timer,等timer中斷到達後呼叫sns_ddf_driver_if_s中指定的handle_timer()函式上報一組感測器資料。handle_timer()中一般採用ddf提供的sns_ddf_smgr_notify_data()函式上報資料。
2, (DRI)0x80又稱作[self-scheduling]
3, (FIFO)0xD0呼叫trigger_fifo_data()函式啟動FIFO模式,當資料量到達指定的閾值,觸發sns_ddf_smgr_data_notify()函式上報一批資料。
(handle_irq->report_data->sns_ddf_smgr_notify_data 上報資料)
一般加速度、陀螺儀等資料量較大的使用FIFO模式,光線、距離等有資料有變化才需要上報的感測器使用DRI模式。
下面以g-sensor bmi160為例具體分析一下:
- sns_ddf_driver_if_s SNS_DD_IF_BMI160 =
- {
- .init = &sns_dd_bmi160_init,
- .get_data = &sns_dd_bmi160_get_data,
- .set_attrib = &sns_dd_bmi160_set_attr,
- .get_attrib = &sns_dd_bmi160_get_attr,
- .handle_timer = &sns_dd_bmi160_handle_timer,
- .handle_irq = &sns_dd_bmi160_interrupt_handler,
- .reset = &sns_dd_bmi160_reset,
- .run_test = &sns_dd_bmi160_self_test,
- .enable_sched_data = &sns_dd_bmi160_enable_sched_data,
- .probe = &sns_dd_bmi160_probe,
- .trigger_fifo_data = &sns_dd_bmi160_trigger_fifo_data
- };
這個結構體是實現高通adsp下sensor驅動的關鍵,驅動程式只需要實現相應的函式,然後將結構體指標填到smgr_sensor_fn_ptr_map表中就會被系統註冊了。
仔細觀察上述結構體中的函式發現有的函式在sns_dd_xxxx.c檔案中如sns_dd_bmi160_init,有的則在sns_dd_xxxx_uimg.c檔案中中如&sns_dd_bmi160_get_data,其實這是一種高通adsp側程式碼特有的架構,即帶有uimg標識的程式碼執行在快取中,其中程式碼一般是做資料上報相關工作的,執行期間可以將外部ddr關閉以實現最低功耗的感測器執行;不帶有umig標識的程式碼執行期間是需要ddr開啟的,其中程式碼一般做一些初始化相關的工作。
下面列出高通平臺上對感測器型別的編號,有一個整體認識。- typedefenum
- {
- SNS_DDF_SENSOR__NONE, // 0
- SNS_DDF_SENSOR_ACCEL, // 1
- SNS_DDF_SENSOR_MAG, // 2
- SNS_DDF_SENSOR_GYRO, // 3
- SNS_DDF_SENSOR_TEMP, // 4
- SNS_DDF_SENSOR_PROXIMITY, // 5
- SNS_DDF_SENSOR_AMBIENT, // 6
- SNS_DDF_SENSOR_PRESSURE, // 7
- SNS_DDF_SENSOR_MAG_6D, // 8
- SNS_DDF_SENSOR_GYRO_6D, // 9
- SNS_DDF_SENSOR_DOUBLETAP, // 10
- SNS_DDF_SENSOR_SINGLETAP, // 11
- SNS_DDF_SENSOR_IR_GESTURE, //12
- SNS_DDF_SENSOR_OEM_SENSOR_01, // 13
- SNS_DDF_SENSOR_OEM_SENSOR_02, // 14
- SNS_DDF_SENSOR_OEM_SENSOR_03, // 15
- SNS_DDF_SENSOR_OEM_SENSOR_04, // 16
- SNS_DDF_SENSOR_OEM_SENSOR_05, // 17
- SNS_DDF_SENSOR_OEM_SENSOR_06, // 18
- SNS_DDF_SENSOR_OEM_SENSOR_07, // 19
- SNS_DDF_SENSOR_OEM_SENSOR_08, // 20
- SNS_DDF_SENSOR_OEM_SENSOR_09, // 21
- SNS_DDF_SENSOR_OEM_SENSOR_10, // 22
- SNS_DDF_SENSOR_STEP_EVENT, // 23
- SNS_DDF_SENSOR_STEP_COUNT, // 24
- SNS_DDF_SENSOR_SMD, // 25
- SNS_DDF_SENSOR_GAME_RV, // 26
- SNS_DDF_SENSOR_HUMIDITY, // 27
- SNS_DDF_SENSOR_RGB, // 28
- SNS_DDF_SENSOR_CT_C, // 29
- SNS_DDF_SENSOR_SAR, // 30
- SNS_DDF_SENSOR_HALL_EFFECT, // 31
- SNS_DDF_SENSOR_AMBIENT_TEMP, // 32
- SNS_DDF_SENSOR_ULTRA_VIOLET, // 33
- SNS_DDF_SENSOR_HEART_RATE, //34
- SNS_DDF_SENSOR_HEART_RATE_RAW, //35
- SNS_DDF_SENSOR_OBJECT_TEMP, //36
- SNS_DDF_SENSOR_TILT_EVENT, //37
- SNS_DDF_SENSOR_ORIENTATION_EVENT, //38
- SNS_DDF_SENSOR__ALL, /**< Addresses all sensors */
- SNS_DDF_SENSOR_LAST
- } sns_ddf_sensor_e;
在具體看資料流程之前,先了解一下高通定義的各種用來配置感測器的屬性
- typedefenum
- {
- SNS_DDF_ATTRIB_POWER_INFO,//0
- SNS_DDF_ATTRIB_POWER_STATE,//1
- SNS_DDF_ATTRIB_DELAYS,//2
- SNS_DDF_ATTRIB_RANGE,//3
- SNS_DDF_ATTRIB_RESOLUTION_ADC,//4
- SNS_DDF_ATTRIB_RESOLUTION,//5
- SNS_DDF_ATTRIB_LOWPASS,//6
- SNS_DDF_ATTRIB_MOTION_DETECT,//7
- SNS_DDF_ATTRIB_DRIVER_INFO,//8
- SNS_DDF_ATTRIB_DEVICE_INFO,//9
- SNS_DDF_ATTRIB_THRESHOLD,//10
- SNS_DDF_ATTRIB_ACCURACY,//11
- SNS_DDF_ATTRIB_BIAS,//12
- SNS_DDF_ATTRIB_ODR,//13
- SNS_DDF_ATTRIB_SUPPORTED_ODR_LIST,//14
- SNS_DDF_ATTRIB_REGISTRY_GROUP,//15
- SNS_DDF_ATTRIB_IO_REGISTER,//16
- SNS_DDF_ATTRIB_FIFO,//17
- SNS_DDF_ATTRIB_ODR_TOLERANCE,//18
- SNS_DDF_ATTRIB_FILTER_DELAY//19
- } sns_ddf_attribute_e;
初始化流程
1,probe
2,init
3,get_attr
SNS_DDF_ATTRIB_RESOLUTION_ADC
SNS_DDF_ATTRIB_LOWPASS,
SNS_DDF_ATTRIB_ODR,
SNS_DDF_ATTRIB_SUPPORTED_ODR_LIST,
SNS_DDF_ATTRIB_FIFO,
SNS_DDF_ATTRIB_DEVICE_INFO,
SNS_DDF_ATTRIB_POWER_INFO,
SNS_DDF_ATTRIB_RESOLUTION,
SNS_DDF_ATTRIB_RANGE,
4,reset
FIFO模式時按power鍵流程
1,reset
2,set_attr 設定SNS_DDF_ATTRIB_POWER_INFO屬性
SNS_DDF_ATTRIB_RANGE,
SNS_DDF_ATTRIB_ODR,
SNS_DDF_ATTRIB_FILTER_DELAY
SNS_DDF_ATTRIB_FIFO
FIFO模式資料上報流程
enable_sched_data
reset
handle_timer
interrupt_handler
handle_irq_attach_temp
interrupt_handler
handle_irq_attach_temp
...
DRI模式資料上報流程
reset
set_attr
enable_sched_data
reset
handle_timer
interrupt_handler
handle_irq_drdy
handle_irq_attach_temp
interrupt_handler
handle_irq_drdy
handle_irq_attach_temp
...

POLLING模式資料上報流程
1,reset
2,get_data
3,handle_timer
4,get_data
5,get_data
...

校準流程
最後看一下感測器的校準流程,因為器件一致性差異等原因,每臺機器的在出廠前都需要進行校準。實現校準的具體流程如下:
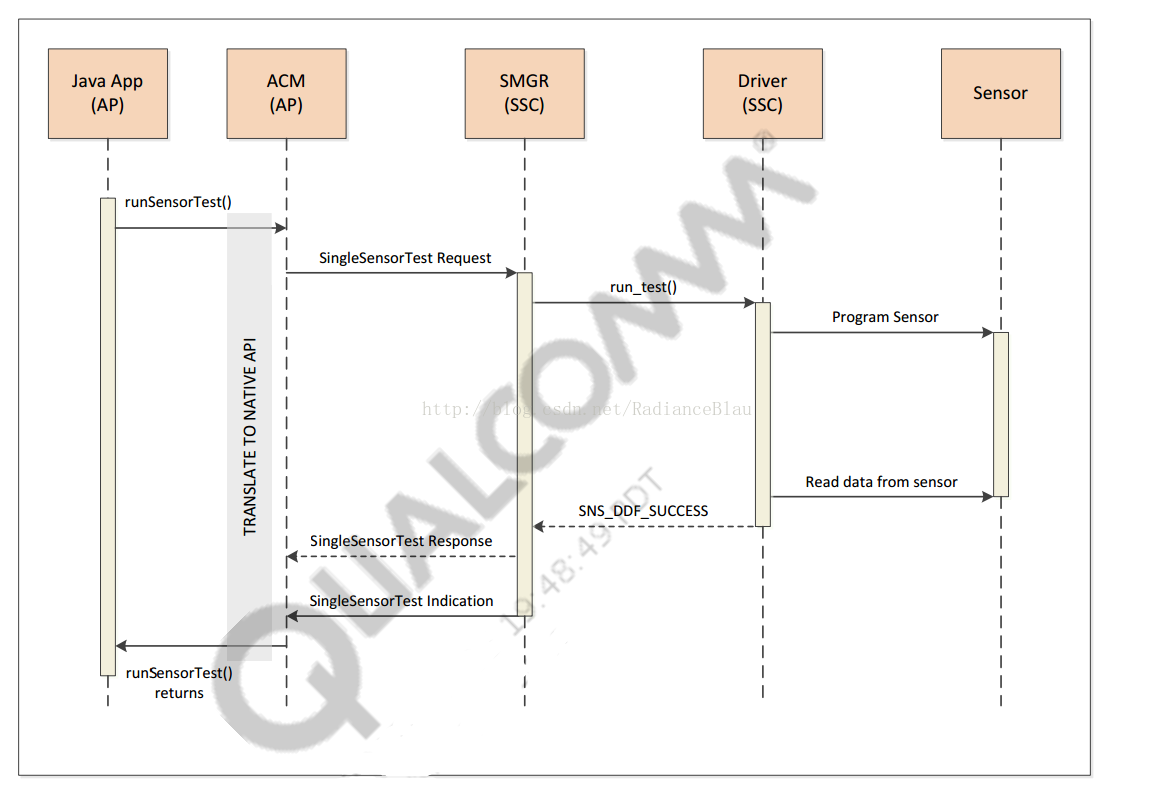
1,校準app想ssc(高通感測器控制器縮寫)發出校準請求
2,ssc呼叫感測器驅動中sns_ddf_driver_if_s結構體中指定的run_test函式
3,run_test 函式中由多種校準模式其中SNS_DDF_TEST_OEM模式會計算當前機器的資料bias,並存儲下來。
- /**
- * Factory tests.
- */
- typedefenum
- {
- SNS_DDF_TEST_SELF, /**< Self test. */
- SNS_DDF_TEST_IRQ, /**< Interrupt test. */
- SNS_DDF_TEST_CONNECTIVITY, /**< Basic connectivity test. */
- SNS_DDF_TEST_SELF_HW, /**< Hardware self test. */
- SNS_DDF_TEST_SELF_SW, /**< Software self test. */
- SNS_DDF_TEST_OEM /**< OEM test. */
- } sns_ddf_test_e;
5,之後每次SSC初始化都會從sns.reg檔案中讀取到當前感測器的bias值
6,我們每次對校準後的感測器進行資料讀取get_data 時,獲取到的原始資料都會與這個bias值進行運算,從而返回給上層校準後的資料。