
STM32F103輸出多路死區互補PWM波
阿新 • • 發佈:2019-02-09
TIM1,TIM8可以產生死區互補PWM波,學習後發現stm32的定時器功能確實很強大,小總結一下方便以後使用的時候做參考。Stm32定時器一共分為三種:tim1和tim8是高階定時器,6和7是基本定時器,2—5是通用定時器。從名字就可以看得出來主要功能上的差異。今天我主要是用定時器做pwm輸出,所以總結也主要是針對pwm方面的。 先大致說下通用和高階定時器的區別。通用的可以輸出四路pwm訊號互不影響。高階定時器可以輸出三對互補pwm訊號外加ch4通道,也就是一共七路。所以這樣算下來stm32一共可以生成4*5+7*2=30路pwm訊號。接下來還有功能上的區別:通用定時器的pwm訊號比較簡單,就是普通的調節佔空比調節頻率(別的不常用到的沒去深究);高階定時器的還帶有互補輸出功能,同時互補訊號可以插入死區,也可以使能剎車功能,從這些看來高階定時器的pwm天生就是用來控制電機的。 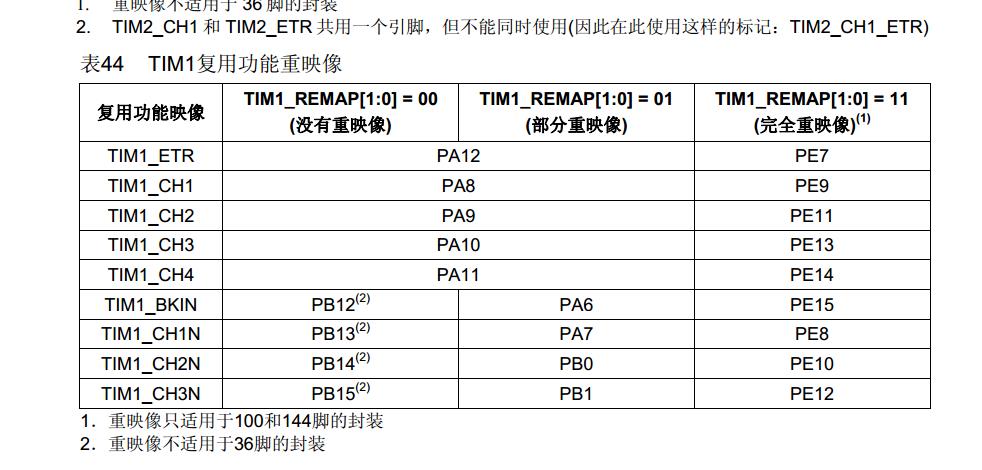 //1、初始化結構體//使用到GPIO、TIM基本配置、比較輸出、死區配置; GPIO_InitTypeDef GPIO_InitStructure2; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_BDTRInitTypeDef TIM_BDTRInitStructure;//2、使能時鐘,GPIO,TIM1,複用功能, //時鐘使能,管腳Rmap RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB
//1、初始化結構體//使用到GPIO、TIM基本配置、比較輸出、死區配置; GPIO_InitTypeDef GPIO_InitStructure2; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_BDTRInitTypeDef TIM_BDTRInitStructure;//2、使能時鐘,GPIO,TIM1,複用功能, //時鐘使能,管腳Rmap RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB
GPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure2);
GPIO_InitStructure2.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure2);//4、 TIM基礎設定;//設定計數頻率為72M/36;即每秒中計數值計數2M;//Period設定為99,即計數夠100清零,對應PWM頻率為2M/100=20Khz;TIM_TimeBaseStructure.TIM_Period=100-1; //週期為計數100次,計數頻率為72M/36; TIM_TimeBaseStructure.TIM_Prescaler=36-1; //設定頻率為72M/36; TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; //不分頻,時鐘72M TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_RepetitionCounter=0; TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);//5、設定輸出比較//Pulse為跳變計數值,當計數值到達20時,PWM由高電平跳變到低電平,設定Pulse/Period即設定了佔空比;在主程式中可以呼叫TIM_SetCompare1(TIM1,psc);動態設定Pulse的值; //定時器比較輸出配置 TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_Pulse=20; //佔空比 TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; // TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; //高階定時器才有的互補輸出配置 TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_High; //互補端輸出極性 TIM_OCInitStructure.TIM_OutputNState=TIM_OutputNState_Enable; TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; //死區後輸出狀態 TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reset; TIM_OC1Init(TIM1,&TIM_OCInitStructure); TIM_OC2Init(TIM1,&TIM_OCInitStructure); 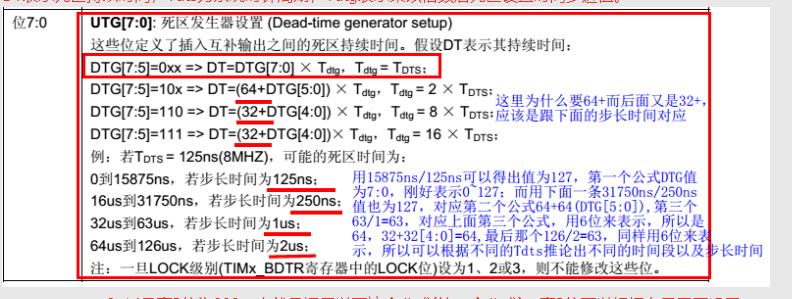
//高階定時器死區配置 TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Disable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Disable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF; TIM_BDTRInitStructure.TIM_DeadTime = 36; //死區時間 TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //剎車功能使能 TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; //剎車輸入極性 TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure); 7、 開啟CCR和ARR,使能TIM1,//ccr1自動重灌載 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM1, ENABLE); TIM_Cmd(TIM1,ENABLE); //高階定時器才有的主輸出使能,不開啟不能用; TIM_CtrlPWMOutputs(TIM1, ENABLE);
//1、初始化結構體//使用到GPIO、TIM基本配置、比較輸出、死區配置; GPIO_InitTypeDef GPIO_InitStructure2; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_BDTRInitTypeDef TIM_BDTRInitStructure;//2、使能時鐘,GPIO,TIM1,複用功能, //時鐘使能,管腳Rmap RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOBGPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure2);
GPIO_InitStructure2.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure2);//4、 TIM基礎設定;//設定計數頻率為72M/36;即每秒中計數值計數2M;//Period設定為99,即計數夠100清零,對應PWM頻率為2M/100=20Khz;TIM_TimeBaseStructure.TIM_Period=100-1; //週期為計數100次,計數頻率為72M/36; TIM_TimeBaseStructure.TIM_Prescaler=36-1; //設定頻率為72M/36; TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; //不分頻,時鐘72M TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_RepetitionCounter=0; TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);//5、設定輸出比較//Pulse為跳變計數值,當計數值到達20時,PWM由高電平跳變到低電平,設定Pulse/Period即設定了佔空比;在主程式中可以呼叫TIM_SetCompare1(TIM1,psc);動態設定Pulse的值; //定時器比較輸出配置 TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_Pulse=20; //佔空比 TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; // TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; //高階定時器才有的互補輸出配置 TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_High; //互補端輸出極性 TIM_OCInitStructure.TIM_OutputNState=TIM_OutputNState_Enable; TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; //死區後輸出狀態 TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reset; TIM_OC1Init(TIM1,&TIM_OCInitStructure); TIM_OC2Init(TIM1,&TIM_OCInitStructure);
//高階定時器死區配置 TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Disable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Disable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF; TIM_BDTRInitStructure.TIM_DeadTime = 36; //死區時間 TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //剎車功能使能 TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; //剎車輸入極性 TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure); 7、 開啟CCR和ARR,使能TIM1,//ccr1自動重灌載 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM1, ENABLE); TIM_Cmd(TIM1,ENABLE); //高階定時器才有的主輸出使能,不開啟不能用; TIM_CtrlPWMOutputs(TIM1, ENABLE);