
【nexys3】【verilog】小設計——拆彈遊戲
設計說明書——拆彈遊戲
一. 設計背景
拆彈遊戲,現有一個定時炸彈,設有一個計時器,如果不能在限定時間內找出唯一的密碼,會發生爆炸,若在規定時間內完成,則相當於炸彈被拆除。
二.使用說明
接通電路,計時器自動開始計時,顯示在數碼管上。利用八個開關輸入二進位制數(從左到右依次為高位到低位),led燈v16亮起則表示輸入密碼偏小,led燈u16亮起則顯示輸入密碼偏大。若輸入正確,則炸彈拆除,顯示“炫酷“的流水燈。若未能在限定時間內完成,則在數碼管上會有相應提示表示”炸彈“已經爆炸。
三.設計說明
1 . 主要部分:分秒計時狀態機,數碼管顯示模組,密碼比較器,流水燈控制模組
2 . 分秒計時器:
clk頻率50Mhz,及每個時鐘週期20ns,考慮1000_000ns即1ms為一個延遲。
設定一個狀態機,轉換機制如下:計數延遲個數,每經歷1000個延遲,狀態轉換一次每次轉換,秒的個位sec_l增加1,當sec_l=9時,其變為0,十位sec_h加一。當sel_l=9且sec_h=5時,分的各位min_l增加一。同理易得min_h的變化規律。當計時器統計了60分鐘後,所有位歸零從新計時。
3 . 密碼比較器:不涉及時序,僅由邏輯電路構成。將輸入資料(一個8位無符號數)與內建密碼比較,若後者較大,則輸出相應訊號,表示輸入密碼變大,反之則輸出相應訊號,表明輸入偏小。如果恰好為密碼,則炸彈被拆除,則將rst_n置為0,控制數碼管清零,以及顯示流水燈表示慶祝。
4 . 數碼管顯示模組:利用四位從左到右分別顯示計時的分十位,分個位,秒十位,秒個位。利用視覺留影原理,動態掃描四個數碼管,時間每個顯示時間為一個延遲,即1ms,小於人眼暫留時間20ms,經測試顯示穩定。
5 . 流水燈,使用了T11,M11,R11,N11四個led作為輸出,具體輸出樣式參見程式碼。
四.程式碼
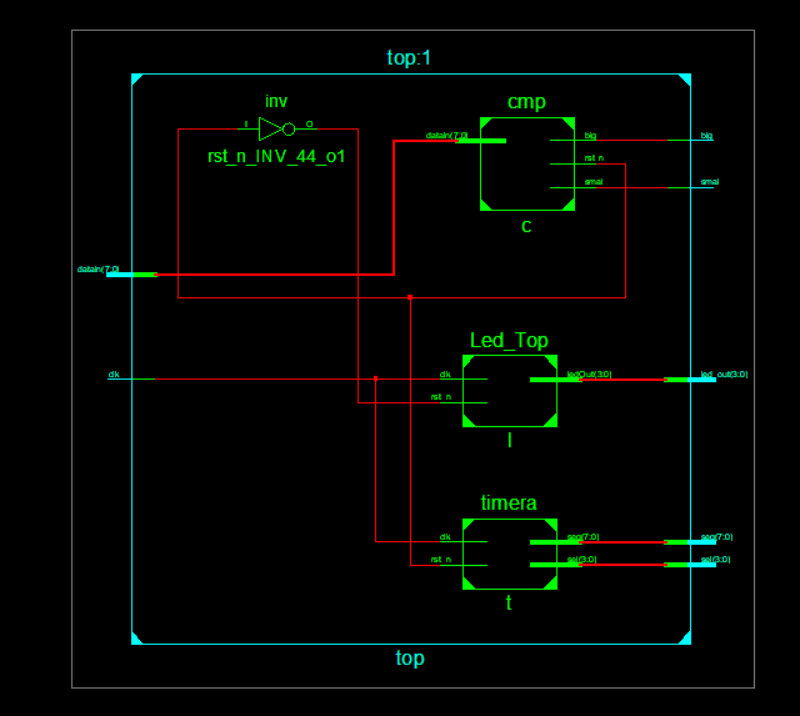
module top( input clk, input [7:0] datain, output big, output smal, output [7:0] seg, output [3:0] sel, output [3:0] led_out ); wire rst_n; cmp c(datain,big,smal,rst_n); timera t(rst_n,clk,seg,sel); Led_Top l(clk,~rst_n,led_out); endmodule
module cmp(
input [7:0]datain,
output big,
output smal,
output rst_n
);
integer key=8'b10101010;
assign smal=(datain<key);
assign big=(datain>key);
assign rst_n=~(datain==key);
endmodule
`define T1MS 16'd49_999
`define FLASH_FREQUENCY 14'd500
module Led_Top
(
input clk,rst_n,
output[3:0] ledOut
);
wire[3:0] isStart;
wire[55:0] SetMSTimes;
wire[3:0] isDone;
Led_Control Led_Control
(
.clk(clk),
.rst_n(rst_n),
.isDone(isDone),
.isStart(isStart),
.SetMSTimes(SetMSTimes)
);
Led_Driver Led_Driver[3:0]
(
.clk(clk),
.rst_n(rst_n),
.StartSig(isStart),
.setMSTimes(SetMSTimes),
.DoneSig(isDone),
.ledOut(ledOut)
);
endmodule
module Led_Control
(
input clk,rst_n,
input[3:0] isDone,
output[3:0] isStart,
output[55:0] SetMSTimes
);
reg[3:0] i,j,k;
reg[3:0] regStart;
reg[13:0] regSetMSTimes[3:0];
[email protected](posedge clk,negedge rst_n)
if(!rst_n) //³õʼ»¯
begin
i<=4'd0;
j<=4'd0;
k<=4'd0;
regStart<=4'b0000;
regSetMSTimes[0]<=14'd0;
regSetMSTimes[1]<=14'd0;
regSetMSTimes[2]<=14'd0;
regSetMSTimes[3]<=14'd0;
end
else
case(i)
0:SerialLight(`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY);
1:PipeLineLight(`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY);
2:ParallelPipeLineLight(`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY,`FLASH_FREQUENCY);
3:i<=4'd0; //¿ØÖÆÑ»·
endcase
assign isStart=regStart;
assign SetMSTimes={regSetMSTimes[3],regSetMSTimes[2],regSetMSTimes[1],regSetMSTimes[0]};
task SerialLight
(
input[13:0] serialSetMSTimes0,serialSetMSTimes1,
serialSetMSTimes2,serialSetMSTimes3
);
case(j)
0:
begin
regSetMSTimes[0]<=serialSetMSTimes0;
regSetMSTimes[1]<=serialSetMSTimes1;
regSetMSTimes[2]<=serialSetMSTimes2;
regSetMSTimes[3]<=serialSetMSTimes3;
regStart[0]<=1'b1;
j<=j+1'b1;
end
1:
if(isDone[0])
begin
regStart[0]<=1'b0;
regStart[1]<=regStart[0];
j<=j+1'b1;
end
2:
if(isDone[1])
begin
regStart[1]<=1'b0;
regStart[2]<=regStart[1];
j<=j+1'b1;
end
3:
if(isDone[2])
begin
regStart[2]<=1'b0;
regStart[3]<=regStart[2];
j<=j+1'b1;
end
4:
if(isDone[3])
begin
regStart[3]<=1'b0;
k<=k+1'b1;
if(k==4'd3)
begin
k<=4'd0;
j<=j+1'b1;
end
else
begin
regStart[0]<=regStart[3];
j<=4'd1;
end
end
5:
begin
j<=4'd0;
i<=i+1'b1;
end
endcase
endtask
task PipeLineLight
(
input[13:0] PipeLineSetMSTimes0,PipeLineSetMSTimes1,
PipeLineSetMSTimes2,PipeLineSetMSTimes3
);
case(j)
0:
begin
regSetMSTimes[0]<=PipeLineSetMSTimes0;
regSetMSTimes[1]<=PipeLineSetMSTimes1;
regSetMSTimes[2]<=PipeLineSetMSTimes2;
regSetMSTimes[3]<=PipeLineSetMSTimes3;
regStart[0]<=1'b1;
j<=j+1'b1;
end
1:
if(isDone[0])
begin
regStart[0]<=1'b1;
regStart[1]<=regStart[0];
regStart[2]<=regStart[1];
regStart[3]<=regStart[2];
k<=k+1'b1;
if(k==4'd2)
begin
k<=4'd0;
j<=j+1'b1;
end
else
j<=j;
end
2:
if(isDone[3])
begin
regStart[0]<=1'b0;
regStart[1]<=regStart[0];
regStart[2]<=regStart[1];
regStart[3]<=regStart[2];
k<=k+1'b1;
if(k==4'd3)
begin
k<=4'd0;
j<=j+1'b1;
end
else
j<=j;
end
3:
begin
j<=4'd0;
i<=i+1'b1;
end
endcase
endtask
task ParallelPipeLineLight
(
input[13:0] PipeLineSetMSTimes0,PipeLineSetMSTimes1,
PipeLineSetMSTimes2,PipeLineSetMSTimes3
);
case(j)
0:
begin
regSetMSTimes[0]<=PipeLineSetMSTimes0;
regSetMSTimes[1]<=PipeLineSetMSTimes1;
regSetMSTimes[2]<=PipeLineSetMSTimes2;
regSetMSTimes[3]<=PipeLineSetMSTimes3;
regStart[0]<=1'b1;
regStart[2]<=1'b1;
j<=j+1'b1;
end
1:
if(isDone[0])
begin
regStart[0]<=1'b1;
regStart[1]<=regStart[0];
regStart[2]<=1'b1;
regStart[3]<=regStart[2];
k<=k+1'b1;
if(k==4'd0)
begin
k<=4'd0;
j<=j+1'b1;
end
else
j<=j;
end
2:
if(isDone[1])
begin
regStart[0]<=1'b0;
regStart[1]<=regStart[0];
regStart[2]<=1'b0;
regStart[3]<=regStart[2];
k<=k+1'b1;
if(k==4'd1)
begin
k<=4'd0;
j<=j+1'b1;
end
else
j<=j;
end
3:
begin
j<=4'd0;
i<=i+1'b1;
end
endcase
endtask
endmodule
module Led_Driver
(
input clk,rst_n,
input StartSig,
input[55:0] setMSTimes,
output DoneSig,
output ledOut
);
wire[13:0] halrSetMSTimes;
wire timerOut;
Led_Driver_Control Led_Driver_Control
(
.clk(clk),
.rst_n(rst_n),
.StartSig(StartSig),
.setMSTimes(setMSTimes),
.timerOut(timerOut),
.DoneSig(DoneSig),
.halrSetMSTimes(halrSetMSTimes)
);
//ÏÈÇó³öÖظ´ÊµÀýµÄ×ÜλÊý£¬È»ºó°´Ã¿¸öʵÀý¶ÔӦλ´ÓµÍµ½¸ß½Ø¶Ï£¬Ã»ÓиßλµÄ¾ÍÊÇÖظ´
Timer Timer //ÿ¸ösetMSTimesÓÐ14룬4¸öTimerÓÐ14*4=56λsetMSTimes£¬
( //Ôò¸øsetMSTimes¸³ÖµÎª56룬setMSTimes»á°´¶ÔӦλ½Ø¶Ï£¬
.clk(clk), //setMSTimes[0]¶ÔÓ¦[13:0]룬setMSTimes[1]¶ÔÓ¦[27:14]λ
.rst_n(rst_n), //setMSTimes[2]¶ÔÓ¦[41:28]룬setMSTimes[3]¶ÔÓ¦[55:42]λ
.StartSig(StartSig),
.setMSTimes(halrSetMSTimes),
.timerOut(timerOut)
);
Led_Interface Led_Interface
(
.clk(clk),
.rst_n(rst_n),
.StartSig(StartSig),
.timerIn(timerOut),
.ledOut(ledOut)
);
endmodule
module Led_Driver_Control
(
input clk,rst_n,
input StartSig,
input[13:0] setMSTimes,
input timerOut,
output DoneSig,
output[13:0] halrSetMSTimes
);
reg countTimerOut;
[email protected](posedge clk,negedge rst_n) //¶ÔʱÖÓ¼ÆÊý£¬ÅжÏÇ°Ò»¸öµÆµÄÁÁÃð
if(!rst_n)
countTimerOut<=1'b0;
else if(StartSig)
begin
if(timerOut && (countTimerOut==1'b1) )
countTimerOut<=1'b0;
else if(timerOut)
countTimerOut<=countTimerOut+1'b1;
end
else
countTimerOut<=1'b0;
assign DoneSig=(StartSig && timerOut && (countTimerOut==1'b1) )?1'b1:1'b0;
assign halrSetMSTimes=setMSTimes>>1;
endmodule
module Timer
(
input clk,rst_n,
input[13:0] setMSTimes,
input StartSig,
output timerOut
);
wire MSOut;
MSTimer MSTimer
(
.clk(clk),
.rst_n(rst_n),
.StartSig(StartSig),
.MSOut(MSOut)
);
NMSTimer NMSTimer
(
.clk(clk),
.rst_n(rst_n),
.setMSTimes(setMSTimes),
.StartSig(StartSig),
.MSIn(MSOut),
.NMSOut(timerOut)
);
endmodule
module MSTimer
(
input clk,rst_n,
input StartSig,
output MSOut
);
reg[15:0] countMS;
[email protected](posedge clk,negedge rst_n)
if(!rst_n)
countMS<=16'd0;
else if(StartSig)
begin
if(countMS == `T1MS)
countMS<=16'd0;
else
countMS<=countMS+1'b1;
end
else
countMS<=16'd0;
assign MSOut=(StartSig && (countMS == `T1MS) )?1'b1:1'b0;
endmodule
module NMSTimer
(
input clk,rst_n,
input MSIn,
input StartSig,
input[13:0] setMSTimes,
output NMSOut
);
reg[13:0] countNMS;
[email protected](posedge clk,negedge rst_n)
if(!rst_n)
countNMS<=14'd0;
else if(StartSig)
begin
if(MSIn && (countNMS==(setMSTimes-1'd1) ) )
countNMS<=14'd0;
else if(MSIn)
countNMS<=countNMS+1'b1;
end
else
countNMS<=14'd0;
assign NMSOut=(StartSig && MSIn && (countNMS==(setMSTimes-1'd1) ) )?1'b1:1'b0;
endmodule
module Led_Interface
(
input clk,rst_n,
input StartSig,
input timerIn,
output ledOut
);
reg regLedOut;
[email protected](posedge clk,negedge rst_n)
if(!rst_n)
regLedOut<=1'b0;
else if(StartSig)
begin
if(timerIn)
regLedOut<=~regLedOut;
end
else
regLedOut<=1'b0;
assign ledOut=regLedOut;
endmodule
// synopsys translate_off
`timescale 1 ns / 1 ps
// synopsys translate_on
module display(
rst_n,
clk,
min_h,
min_l,
sec_h,
sec_l,
display_flag,
seg,
sel
);
input rst_n; // 全域性復位,低電平有效
input clk; // 全域性時鐘,50MHz
input [2:0] min_h; // 分的十位數
input [3:0] min_l; // 分的個位數
input [2:0] sec_h; // 秒的十位數
input [3:0] sec_l; // 秒的個位數
input display_flag; // 數碼管動態顯示標誌位
output reg [7:0] seg; // 編碼後的數碼管輸出
output reg [3:0] sel; // 數碼管的位選
function [7:0] seg_data;
input [3:0] din; // 待編碼資料
input dp; // 決定數碼管點號是否點亮,1為點亮
begin
case(din)
4'd0 : seg_data = {dp,7'b1000000};
4'd1 : seg_data = {dp,7'b1111001};
4'd2 : seg_data = {dp,7'b0100100};
4'd3 : seg_data = {dp,7'b0110000};
4'd4 : seg_data = {dp,7'b0011001};
4'd5 : seg_data = {dp,7'b0010010};
4'd6 : seg_data = {dp,7'b0000010};
4'd7 : seg_data = {dp,7'b1111000};
4'd8 : seg_data = {dp,7'b0000000};
4'd9 : seg_data = {dp,7'b0010000};
endcase
end
endfunction
wire flag;
assign flag=(min_l>=3'b010);
reg [1:0] cnt; // 由於只有四個數碼管,故只需兩位
always @(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
cnt <= (0);
else if(display_flag == 1'b1)
cnt <= cnt + 1'b1;
else
cnt <= cnt;
end
always @(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
seg <= (0);
sel <= (0);
end
else if(flag==1'b1)
begin
case(cnt)
2'b00 : // 顯示秒個位數
begin
seg <= {1'b1,7'b0111111};
sel <= 4'b0111;
end
2'b01 : // 顯示秒十位數
begin
seg <= {1'b1,7'b1000000};
sel <= 4'b1011;
end
2'b10 : // 顯示分個位數
begin
seg <= {1'b1,7'b0001000};
sel <= 4'b1101;
end
2'b11 : // 顯示分十位數
begin
seg <= {1'b1,7'b0000011};
sel <= 4'b1110;
end
endcase
end
else
begin
case(cnt)
2'b00 : // 顯示秒個位數
begin
seg <= seg_data(sec_l,1'b1);
sel <= 4'b0111;
end
2'b01 : // 顯示秒十位數
begin
seg <= seg_data({1'b0,sec_h},1'b1);
sel <= 4'b1011;
end
2'b10 : // 顯示分個位數
begin
seg <= seg_data(min_l,1'b0);
sel <= 4'b1101;
end
2'b11 : // 顯示分十位數
begin
seg <= seg_data({1'b0,min_h},1'b1);
sel <= 4'b1110;
end
endcase
end
end
endmodule
// synopsys translate_off
`timescale 1 ns / 1 ps
// synopsys translate_on
module time_counter(
rst_n,
clk,
min_h,
min_l,
sec_h,
sec_l,
display_flag
);
parameter CLK_CYCLE = 20; // 時鐘週期,單位ns
parameter T0 = 1000_000; // 1ms延時
parameter T0_VAL = T0/CLK_CYCLE-1; // 1ms延時
input rst_n; // 全域性復位,低電平有效
input clk; // 全域性時鐘,50MHz
output reg [2:0] min_h; // 分的十位數
output reg [3:0] min_l; // 分的個位數
output reg [2:0] sec_h; // 秒的十位數
output reg [3:0] sec_l; // 秒的個位數
output display_flag; // 數碼管動態掃描標誌位
reg [15:0] cnt;
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
cnt <= (0);
else if(cnt < T0_VAL)
cnt <= cnt + 1'b1;
else
cnt <= (0);
end
assign delay_1ms = (cnt == T0_VAL); // 1ms延時完成標誌位
assign display_flag = delay_1ms; // 數碼管動態掃描標誌位
reg [9:0] mse;
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
mse <= (0);
else
begin
if(delay_1ms == 1'b1)
begin
if(mse < 10'd999)
mse <= mse + 1'b1;
else
mse <= (0);
end
end
end
wire sec_l_flag = ((mse == 10'd999) && (delay_1ms == 1'b1)); // 1s延時完成標誌位
// 秒個位數計數
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
sec_l <= 0;
else
begin
if(sec_l_flag == 1'b1)
begin
if(sec_l < 4'd9)
sec_l <= sec_l + 1'b1;
else
sec_l <= 0;
end
end
end
wire sec_h_flag = ((sec_l == 4'd9) && (sec_l_flag == 1'b1)); // 秒個位數進位標誌位
// 秒十位數計數
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
sec_h <= 0;
else
begin
if(sec_h_flag == 1'b1)
begin
if(sec_h < 3'd5)
sec_h <= sec_h + 1'b1;
else
sec_h <= 0;
end
end
end
wire min_l_flag = ((sec_h == 3'd5) && (sec_h_flag == 1'b1)); // 秒十位數進位標誌位
// 分個位數計數
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
min_l <= 0;
else
begin
if(min_l_flag == 1'b1)
begin
if(min_l < 4'd9)
min_l <= min_l + 1'b1;
else
min_l <= 0;
end
end
end
wire min_h_flag = ((min_l == 4'd9) && (min_l_flag == 1'b1)); // 分個位數進位標誌位
// 分十位數計數
[email protected](posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
min_h <= 0;
else
begin
if(min_h_flag == 1'b1)
begin
if(min_h < 3'd5)
min_h <= min_h + 1'b1;
else
min_h <= 0;
end
end
end
endmodule
五。總結
本設計中主體部分是一個分秒計時器的狀態機,運用了分頻,數碼管的動態掃描等原理。靈活使用了數碼管,開關,led等裝置實現了計時器,流水燈,顯示等,從而完成了一個具有一定可玩性的小遊戲。
相關推薦
【nexys3】【verilog】小設計——拆彈遊戲
設計說明書——拆彈遊戲 一. 設計背景拆彈遊戲,現有一個定時炸彈,設有一個計時器,如果不能在限定時間內找出唯一的密碼,會發生爆炸,若在規定時間內完成,則相當於炸彈被拆除。二.使用說明接通電路,計時器自動開始計時,顯示在數碼管上。利用八個開關輸入二進位制數(從左
2018中國大學生程序設計競賽 - 網絡選拔賽 1001 - Buy and Resell 【優先隊列維護最小堆+貪心】
input 不出 def pop earch 無限 math 上交 要去 題目傳送門:http://acm.hdu.edu.cn/showproblem.php?pid=6438 Buy and Resell Time Limit: 2000/1000 MS (Java/O
【CPU微架構設計】利用Verilog設計基於飽和計數器和BTB的分支預測器
在基於流水線(pipeline)的微處理器中,分支預測單元(Branch Predictor Unit)是一個重要的功能部件,它負責收集和分析分支/跳轉指令的引數和執行結果,當處理新的分支/跳轉指令時,BPU將根據已有的統計結果和當前分支跳轉指令的引數,預測其執行結果,為流水線取指提供決策依據,進而提高流
【小知識】輕鬆學習MATLAB GUI設計
GUI是“Graphical User Interface”使用者介面介面的縮寫形式。GUI是基於圖形的互動介面,使用選單、按鈕、滑鼠和其它“圖形”與使用者進行資訊互動,而不是採用命令列的形式。 如果你接觸過多種語言的GUI設計,你會發現每種語言的基本程式設計方
【FPGA】Verilog狀態機設計
狀態機是fpga設計中極其重要的一種技巧,掌握狀態機的寫法可以使fpga的開發事半功倍。 下面記錄一下狀態機的基本知識理論。 例項: 三種狀態機實現程式碼: // 一段式狀態機 m
【小家java】 Restful風格的API設計中,怎麼實現批量刪除?
相關閱讀 每篇一句 面試高大上,面試造飛機,工作擰螺絲 因此不能以為自己工作覺得還OK,就覺得自己技術還不錯了 如題,指的是在restful風格的url設計中,怎麼實現批量刪除呢? 這裡指的刪除是真刪除,不是邏輯刪除。如果是邏輯刪除,其實就是upd
pads規則【對某一個元件單獨設計規則】【layout規則對router不適用】【不能拉layout的最小走線規則的線】
對某一個元件單獨設計規則 遇到這樣的一個情況:layout下不管怎麼樣都不能夠對某一個元件單獨設計規則(安全間隔的規則),設定之後再檢查還是會出現錯誤,後來摸索和很久終於找到了一個問題------要設定的安全間隔小於了預設規則的安全間距,這樣的設計pads是不贊同的,但是也
【verilog】單週期MIPS CPU設計
一、 實驗要求設計一個單週期MIPS CPU,依據給定過的指令集,設計核心的控制訊號。依據給定的資料通路和控制單元訊號進行設計。二、 實驗內容1.資料通路設計:mips指令格式只有三種:1)R型別 從暫存器堆中取出兩個運算元,計算結果寫回暫存器堆2)I型別 用
【小家java】String類為什麼要設計成final?不可變有什麼優點?
相關閱讀 原始碼解釋: 先貼一下String類的申明程式碼: public final class String implements java.io.Serializable, Comparable<String>, CharSeque
【BZOJ2424】[HAOI2010]訂貨 最小費用流
需求 bfs pop 容量 family light 成本 pri || 【BZOJ2424】[HAOI2010]訂貨 Description 某公司估計市場在第i個月對某產品的需求量為Ui,已知在第i月該產品的訂貨單價為di,上個月月底未銷完的單位產品要付存貯費用
【Spark深入學習 -12】Spark程序設計與企業級應用案例02
提升 算子 lin count() roi println groupby 工作問題 衍生 ----本節內容------- 1.遺留問題答疑 1.1 典型問題解答 1.2 知識點回顧 2.Spark編程基礎 2.1 Spark開發四部曲 2.2 RDD典型實例
【java設計模式】【行為模式Behavioral Pattern】策略模式Strategy Pattern
java sys algorithm stat 設計模式 log sets ace 行為模式 1 package com.tn.策略模式; 2 3 public class Client { 4 private Strategy strategy; 5
【Unity3D自學記錄】Unity3D之自制小鐘表
new 一個 unity cond 代碼 enter 歐拉角 onu text 今天來寫一個小鐘表,事實上非常easy,就運用到了歐拉角。 首先創建時鐘、分鐘、秒鐘以及4個點(12點、3點、6點、9點)偷懶了~~沒弄那麽多點。 時鐘、分鐘、秒鐘這三個父級的中心一定要註意
【java設計模式】【創建模式Creational Pattern】建造模式Builder Pattern
part main ons rod over res {} retrieve [] 1 package com.tn.pattern; 2 3 public class Client { 4 public static void main(String[
【網易】 【作業】 程序設計入門—C語言 翁愷 第二周
rate span asio tin bar ase read con hab #include<stdio.h> int main() { int a=0,b=0; scanf("%d",&a); if(a>=800)
POJ--3164--Command Network【朱劉算法】最小樹形圖
-- com 刪除 spa col namespace sca while 我們 鏈接:http://poj.org/problem?id=3164 題意:告訴n個點坐標,m條邊表示兩個點之間有路。從1點開始建立一個有向圖最小生成樹。 朱劉算法模板題 ====
【5】標題上的小logo
-- span pan shortcut color font nbsp 圖片 logo <link rel="shortcut icon" href="logo圖片的路徑"> shortcut --- 捷徑,近路 icon --- 圖標【5】標題上的小lo
【最小樹形圖(奇怪的kruskal)】【SCOI 2012】【bzoj 2753】滑雪與時間膠囊
方案 track solved views end cmp ren scoi2012 ext 2753: [SCOI2012]滑雪與時間膠囊 Time Limit: 50 Sec Memory Limit: 128 MB Submit: 1621
【朱-劉算法】【最小樹形圖】hdu6141 I am your Father!
memset 最大 ring scan freopen dir inf strong pri 題意:給你一張帶權有向圖,讓你求最大樹形圖。並在此前提下令n號結點父親的編號最小。 比賽的時候套了個二分,TLE了。 實際上可以給每個邊的權值乘1000,對於n號結點的父邊,加上(
【數學基礎】【歐拉定理模板】【費馬小定理】
基礎 int 復雜度 amp pan -1 log 分治 質數 費馬小定理:當p是一個質數時,且a和p互質,有ap-1=1(mod p) (歐拉定理的一種特殊情況) 歐拉定理:如果a和n互質,那麽aφ(n)=1(mod n) 對於任意a,b,n就有 ab=