
SLAM: 用測試資料集來測試VINS
目前編寫雙目VINS程式碼,發現雙目VINS初始化後的尺度存在問題(理想化雙目尺度應該為1),所以想著利用無誤差的測試集來測試一下自己寫的程式碼。我先在單目VINS下做了測試,下面是我利用github上賀所長的單目測試集在單目vins上測試的過程:
1.單目VINS測試資料集:https://github.com/HeYijia/vio_data_simulation.
(下載後通過mkdir build;cd build; cmake ..; make ; cd ../bin; ./data_gen 命令生成待讀取資料,資料儲存在bin/裡面)
(1)gener_alldata.cpp :
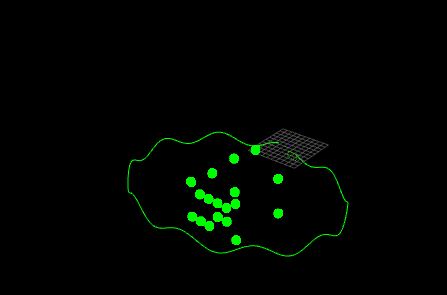
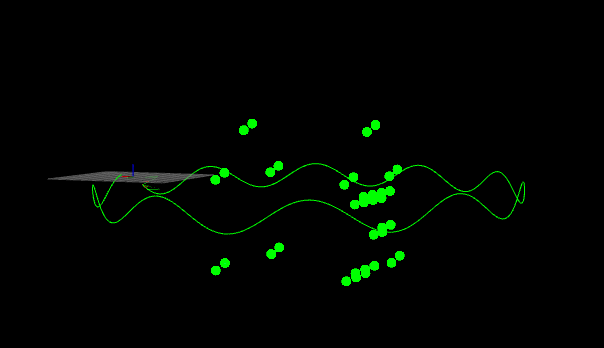
A. createpointslines(): 通過這個函式取出設計好的房子圖形中的map點,之後所有的影象都能觀測到這些map點,且順 序不變;
B. imudata 和 imudata_noise: 只用了imudata;
C. camdata: 完全由imudata 和map點決定,所以沒有誤差;
(2)imudata的生成:imu.cpp
A. MotionModel: 直接給出imu的線加速度和角加速度 以及imu的R、t;(需要推導)
2.在VINS中新建兩個節點分別讀取feature資料 和 imu資料:
(1)其中map點在各幀觀測的歸一化座標儲存在 vio_data_simulation/bin/keyframe/all_points_x.txt中
(6維,map3維+1+歸一化座標點2維),
(2)feature的時間 儲存在vio_data_simulation/bin/cam_pose.txt中
(14維,時間1維+q4維+t3維+陀螺儀加速度3維+線加速度3 維),
(3)imu資料儲存在vio_data_simulation/bin/imu_pose.txt(無噪聲)
( 與cam_pose儲存相同,只需要時間和gyro、acc 7維)。
3.節點發布:
(1)feature釋出:注意頻率為30
ros::init(argc, argv, "test_pub_feature"); ros::NodeHandle n("~"); ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info); pub_img = n.advertise<sensor_msgs::PointCloud>("feature", 1000); test_s();// 讀取feature 和 time 資料 int count = 0; ros::Rate loop_rate(30); while(ros::ok()) { pub_feature(all_points[count],cam_time[count]); ros::spinOnce(); loop_rate.sleep(); count ++; }
(2)imu釋出:注意頻率為200(與上面類似)
4.引數修改:projection_parameters + cam to imu 的 R、t
5.執行結果:refine之前g=9.80418
6.完整程式碼:
test_pub_feature.cpp
#include <ros/ros.h>
#include <sensor_msgs/PointCloud.h>
#include <message_filters/subscriber.h>
#include <ros/time.h>
#include <fstream>
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Geometry>
#include <eigen3/Eigen/Dense>
#include <iostream>
#include <vector>
bool PUBLISH = 1;
ros::Publisher pub_img,pub_match,pub_imu;
ros::Publisher pub_restart;
int image_num = 600;
int init_pub = 0;
/*
struct Imu_Data
{
double time;
Eigen::Vector3d angular_velocity;
Eigen::Vector3d linear_acceleration;
};*/
void Load_Feature(std::string filename, std::vector<Eigen::Vector2d> &point)
{
std::ifstream f;
Eigen::Vector3d pw;
Eigen::Vector2d pts;
f.open(filename.c_str());
if(!f.is_open())
{
std::cerr << " can't open LoadFeatures file "<<std::endl;
return;
}
while (!f.eof())
{
std::string s;
std::getline(f,s);
if(! s.empty())
{
std::stringstream ss;
ss << s;
int empty;
ss>>pw(0);
ss>>pw(1);
ss>>pw(2);
ss>>empty;
ss>>pts(0);
ss>>pts(1);
point.push_back(pts);
}
}
}
void Load_camTime(std::string filename, std::vector<double> &time)
{
std::ifstream f;
double per_time;
f.open(filename.c_str());
if(!f.is_open())
{
std::cerr << " can't open LoadcamTime file "<<std::endl;
return;
}
while (!f.eof())
{
std::string s;
std::getline(f,s);
if(! s.empty())
{
std::stringstream ss;
ss << s;
Eigen::Quaterniond q;
Eigen::Vector3d t;
Eigen::Vector3d gyro;
Eigen::Vector3d acc;
ss>>per_time;
ss>>q.w();
ss>>q.x();
ss>>q.y();
ss>>q.z();
ss>>t(0);
ss>>t(1);
ss>>t(2);
ss>>gyro(0);
ss>>gyro(1);
ss>>gyro(2);
ss>>acc(0);
ss>>acc(1);
ss>>acc(2);
time.push_back(per_time);
}
}
}
void pub_feature(const std::vector<Eigen::Vector2d> &point, const double per_time)
{
sensor_msgs::PointCloudPtr feature_points(new sensor_msgs::PointCloud);
sensor_msgs::ChannelFloat32 id_of_point;
sensor_msgs::ChannelFloat32 u_of_point;
sensor_msgs::ChannelFloat32 v_of_point;
sensor_msgs::ChannelFloat32 velocity_x_of_point;
sensor_msgs::ChannelFloat32 velocity_y_of_point;
ros::Time feature_time(per_time);
feature_points->header.stamp = feature_time;
feature_points->header.frame_id = "world";
for(int i=0; i<point.size(); i++)
{
geometry_msgs::Point32 p;
p.x = point[i](0);
p.y = point[i](1);
p.z = 1;
feature_points->points.push_back(p);
id_of_point.values.push_back(i);
u_of_point.values.push_back(0);
v_of_point.values.push_back(0);
velocity_x_of_point.values.push_back(0);
velocity_y_of_point.values.push_back(0);
}
feature_points->channels.push_back(id_of_point);
feature_points->channels.push_back(u_of_point);
feature_points->channels.push_back(v_of_point);
feature_points->channels.push_back(velocity_x_of_point);
feature_points->channels.push_back(velocity_y_of_point);
//ROS_INFO("publish Point %f, at %f", feature_points->header.stamp.toSec(), ros::Time::now().toSec());
pub_img.publish(feature_points);
}
std::vector<double> cam_time;
std::vector<std::vector<Eigen::Vector2d>> all_points;
void test_s()
{
std::stringstream filename_camTime;
filename_camTime<<"/home/lupingping/slam/catkin_ws/src/data_for_test/vio_data_simulation/bin/cam_pose.txt";
Load_camTime(filename_camTime.str(), cam_time);
for(int n = 0; n < image_num; n++)
{
std::stringstream filename_feature;
filename_feature<<"/home/lupingping/slam/catkin_ws/src/data_for_test/vio_data_simulation/bin/keyframe/all_points_"<< n <<".txt";
std::vector<Eigen::Vector2d> point;
Load_Feature(filename_feature.str(), point);
all_points.push_back(point);
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "test_pub_feature");
ros::NodeHandle n("~");
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);
pub_img = n.advertise<sensor_msgs::PointCloud>("feature", 1000);
test_s();
int count = 0;
ros::Rate loop_rate(30);
while(ros::ok())
{
pub_feature(all_points[count],cam_time[count]);
ros::spinOnce();
loop_rate.sleep();
count ++;
}
}test_pub_imu.cpp
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
#include <message_filters/subscriber.h>
#include <geometry_msgs/Vector3.h>
#include <ros/time.h>
#include <fstream>
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Geometry>
#include <eigen3/Eigen/Dense>
#include <iostream>
#include <vector>
bool PUBLISH = 1;
ros::Publisher pub_imu;
struct Imu_Data
{
double time;
Eigen::Vector3d angular_velocity;
Eigen::Vector3d linear_acceleration;
};
void Load_imu(std::string filename, std::vector<Imu_Data> &imu_data)
{
Imu_Data imu_temp;
std::ifstream f;
f.open(filename.c_str());
if(!f.is_open())
{
std::cerr << " can't open Loadimu file "<<std::endl;
return;
}
while (!f.eof())
{
std::string s;
std::getline(f,s);
if(! s.empty())
{
std::stringstream ss;
ss << s;
double time;
Eigen::Quaterniond q;
Eigen::Vector3d t;
Eigen::Vector3d gyro;
Eigen::Vector3d acc;
ss>>time;
ss>>q.w();
ss>>q.x();
ss>>q.y();
ss>>q.z();
ss>>t(0);
ss>>t(1);
ss>>t(2);
ss>>gyro(0);
ss>>gyro(1);
ss>>gyro(2);
ss>>acc(0);
ss>>acc(1);
ss>>acc(2);
imu_temp.time = time;
imu_temp.linear_acceleration = acc;
imu_temp.angular_velocity = gyro;
imu_data.push_back(imu_temp);
}
}
}
void pubImu(const Imu_Data & imu_data)
{
sensor_msgs::ImuPtr imu(new sensor_msgs::Imu);
geometry_msgs::Vector3 linear_acceleration;
geometry_msgs::Vector3 angular_velocity;
ros::Time imu_time(imu_data.time);
imu->header.stamp = imu_time;
linear_acceleration.x = imu_data.linear_acceleration(0);
linear_acceleration.y = imu_data.linear_acceleration(1);
linear_acceleration.z = imu_data.linear_acceleration(2);
imu->linear_acceleration = linear_acceleration;
angular_velocity.x = imu_data.angular_velocity(0);
angular_velocity.y = imu_data.angular_velocity(1);
angular_velocity.z = imu_data.angular_velocity(2);
imu->angular_velocity = angular_velocity;
pub_imu.publish(imu);
}
std::vector<double> cam_time;
std::vector<Imu_Data> imu_data;
std::vector<std::vector<Eigen::Vector2d>> all_points;
void test_s()
{
std::stringstream filename_imu;
filename_imu << "/home/lupingping/slam/catkin_ws/src/data_for_test/vio_data_simulation/bin/imu_pose.txt";
Load_imu(filename_imu.str(),imu_data);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "test_pub_imu");
ros::NodeHandle n("~");
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);
pub_imu = n.advertise<sensor_msgs::Imu>("imu",1000);
test_s();
int count = 0;
ros::Rate loop_rate(200);
while(ros::ok())
{
pubImu(imu_data[count]);
ros::spinOnce();
loop_rate.sleep();
count ++;
}
}