顯著性檢測——PFT模型
阿新 • • 發佈:2019-02-11
1. 參考文獻
Guo C, Ma Q, Zhang L. Spatio-temporal Saliency detection using phase spectrum of quaternion fourier transform[J]. 2008:1-8.
2. 模型實現
2.1 顯著性檢測公共標頭檔案
#ifndef SALIENTCOMMON_H #define SALIENTCOMMON_H // std lib #include <iostream> #include <string> #include <vector> #include <fstream> // opencv lib #include <opencv2/core/core.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <opencv2/imgcodecs/imgcodecs.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/ml/ml.hpp> using namespace std; using namespace cv; #endif // SALIENTCOMMON_H
2.2 顯著性檢測標頭檔案
#ifndef SALIENTPFT_H #define SALIENTPFT_H #include "salientcommon.h" // Guo C, Ma Q, Zhang L. Spatio-temporal Saliency detection using phase spectrum of quaternion fourier transform[J]. 2008:1-8. class salientPFT { public: salientPFT(Mat& orgImg); void m_getSalientPFT(Mat& result); ~salientPFT(); private: Mat m_OrgImg; Mat m_resultImg; }; #endif // SALIENTPFT_H
2.3 顯著性檢測實現
#include "salientpft.h" salientPFT::salientPFT(Mat& orgImg) { orgImg.copyTo(m_OrgImg); } salientPFT::~salientPFT() { ; } void salientPFT::m_getSalientPFT(Mat& result) { Mat tmpOrgImg; if(m_OrgImg.channels() == 3) { cvtColor(m_OrgImg, tmpOrgImg, CV_RGB2GRAY); } else { m_OrgImg.copyTo(tmpOrgImg); } // Get FFT2 Factorys int M = getOptimalDFTSize(tmpOrgImg.rows); int N = getOptimalDFTSize(tmpOrgImg.cols); // padding Image Mat tmpPaddingImg; copyMakeBorder(tmpOrgImg, tmpPaddingImg, 0, M - tmpOrgImg.rows, 0, N - tmpOrgImg.cols, BORDER_CONSTANT, Scalar(0)); // FFT2 Translate Mat planes[2]; tmpPaddingImg.convertTo(tmpPaddingImg, CV_32F); planes[0] = tmpPaddingImg; planes[1] = Mat::zeros(tmpPaddingImg.size(), CV_32F); Mat tmpComplexImg; merge(planes, 2, tmpComplexImg); dft(tmpComplexImg, tmpComplexImg); split(tmpComplexImg, planes); // compute phase Mat tmpPhaseImg; phase(planes[0], planes[1], tmpPhaseImg); // compute log abs Magnitude Mat tmpMagImg; magnitude(planes[0], planes[1], tmpMagImg); // compute sin & cosion Mat tmpSin, tmpCosion; cv::divide(planes[0], tmpMagImg, tmpCosion); // Re part cv::divide(planes[1], tmpMagImg, tmpSin); // Im Part planes[0] = tmpCosion; planes[1] = tmpSin; merge(planes, 2, tmpComplexImg); Mat tmpSalientImg; dft(tmpComplexImg, tmpSalientImg, DFT_INVERSE); // Normalize split(tmpSalientImg, planes); magnitude(planes[0], planes[1], tmpMagImg); GaussianBlur(tmpMagImg, tmpMagImg, Size(7,7), 3); double minVal = 0, maxVal = 0; minMaxLoc(tmpMagImg, &minVal, &maxVal); double scale = 255./(maxVal - minVal); double shift = -minVal * scale; convertScaleAbs(tmpMagImg(Rect(0,0,m_OrgImg.cols, m_OrgImg.rows)), m_resultImg, scale, shift); m_resultImg.copyTo(result); }
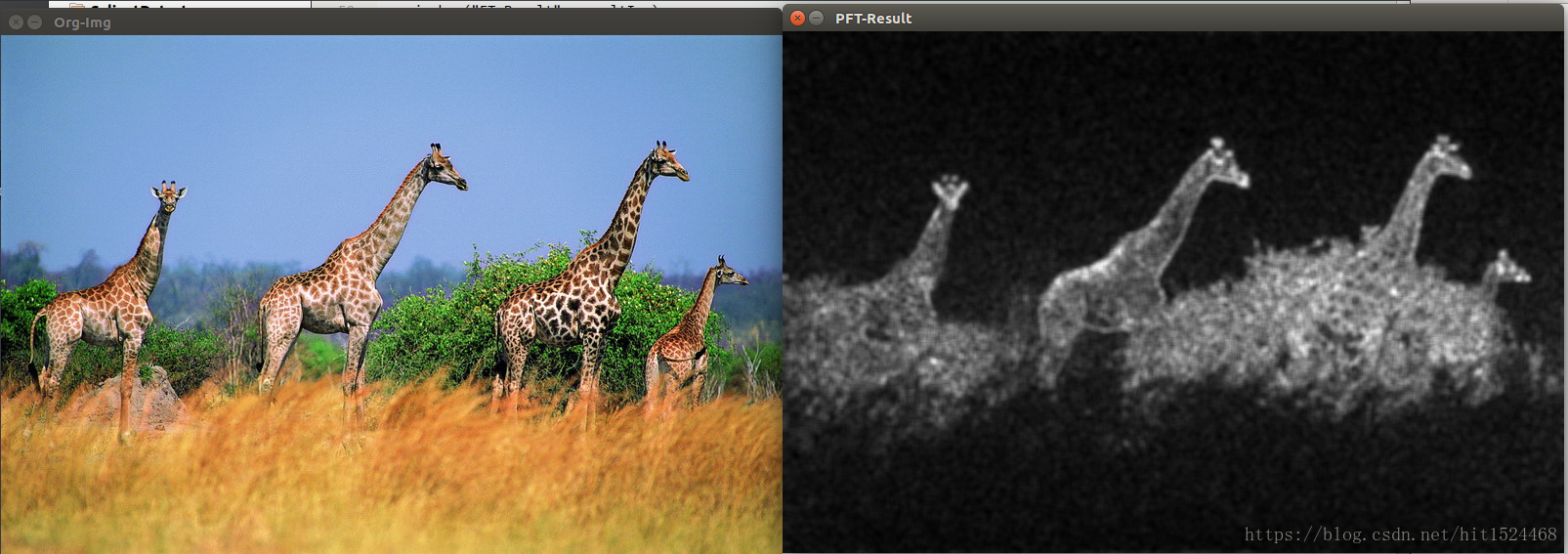
3. 模型效果