
無人機導航之玩轉座標系
對於無人機系統而言,最容易想到的硬體是GPS模組,最令人印象深刻的飛行功能是自動導航飛行。能夠按照預先規劃的飛行路線進行自動飛行是無人機在功能上與遙控飛機的主要區別之一。

不管是天上飛的,地上跑的,還是海里遊的,我們都希望能引導它們到期望的目標位置,但我們如果連該物體在哪裡都不知道,就沒辦法實現導航。因此必須獲得被控物件在某個座標系中的具體座標。對於無人機導航也是如此,我們期望它從A點飛到B點,就要不斷通過GPS或其它導航儀器獲取無人機當下的位置座標,並根據無人機的位置調整無人機的姿態最終飛到B點。
在無人機導航中常會出現的誤解:1.GPS輸出的高度座標是相對於海平面,與經度緯度一樣可以直接使用;2.通過GPS獲得的速度資訊可以直接使用;3.IMU輸出的飛行器加速度資訊是 “平面“加速度。
這些問題涉及到無人機導航中的基礎概念,同時也是最容易讓人混亂的概念之一:無人機座標系。
無人機導航中常見的座標系包括:地球中心座標系(Earth Centered Earth Fixed Coordinate System),當地水平座標系(North-East-Down Coordinate System),WGS-84大地座標系(World Geodetic Coordinate System 1984),機體座標系(Body Frame),機體水平座標系(Vehicle -carried NED Coordinate System)。
1.地球中心座標系(ECEF)
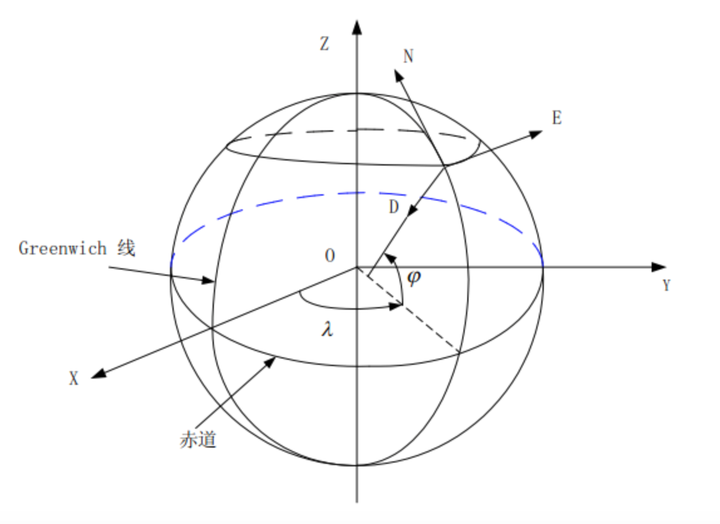
該座標系與地球固聯,且隨著地球轉動。上圖中O即為該座標原點,位置在地球質心。X軸通過Greenwich(格林尼治)線和赤道線的交點,正方向為原點指向交點方向。 Z軸通過原點指向北極。 Y軸與X,Z軸構成右手座標系。
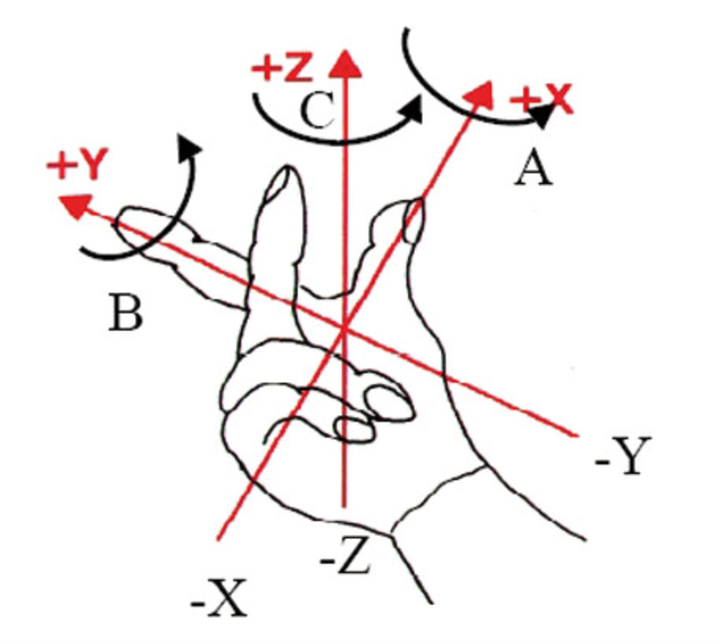
右手座標系即符合‘右手法則’的座標系統稱,這個法則大家會經常見到,因它的目的是為了以最簡單的方式確定座標軸以及正方向。
如圖,把右手大拇指,食指,中指程“”痙攣“”狀,其中任意兩個手指與已確定的兩個座標軸及正方向重合,第三個手指的方向就是剩下座標軸的正方向。
2. WGS-84座標系
GPS輸出的座標資料就是這個座標系下的!
上面這句話複雜一點解釋就是:GPS單點定位的座標以及相對定位中解算的基線向量屬於WGS-84大地座標系。
X軸指向BIH(國際時間服務機構)1984.0定義的零子午面(Greenwich)和協議地球極(CTP)赤道的交點。Z軸指向CTP方向。Y軸與X,Z軸構成右手座標系
什麼“BIH1984.0”很麻煩有沒有?!一句話理解:把ECEF用在GPS中就是WGS-84座標系
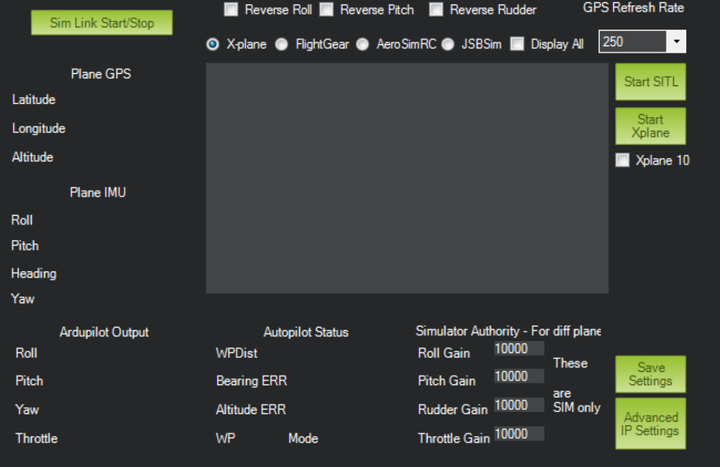
上面圖中大家很容易看出GPS輸出的常見定位資料 :經度(Longitude),緯度(Latitude),海拔(altitude)。不知道大家有沒有奇怪過,為什麼有了GPS輸出的海拔高度,我們還是要用氣壓計或者其他硬體來輔助定高呢?為什麼GPS的海拔資料精度沒有辦法支撐無人機高度定位呢?
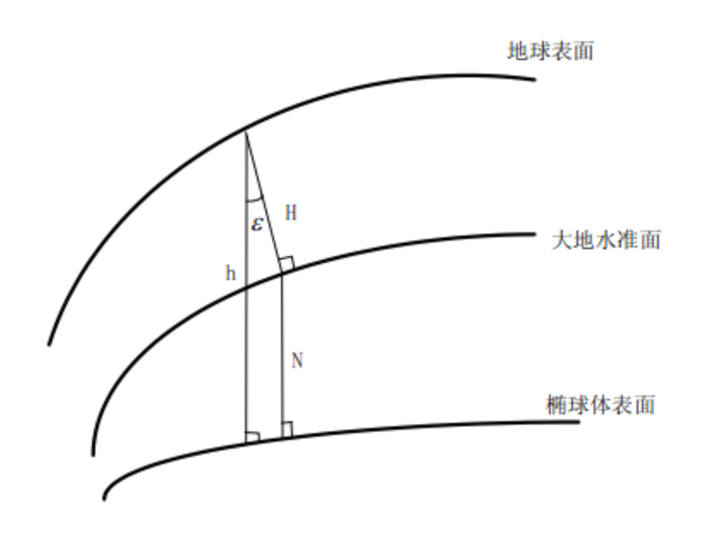
因為GPS輸出的資訊是相對於WGS-84座標系。我們可以把它看做一個參考橢球體,GPS輸出的高度是垂直於橢球表面的高度,不是相對於海平面(Mean Sea Level)的高度。上圖中h是GPS測得的相對於橢球表面的高度;H表示正高;N表示大地水準偏差,範圍正負100m之間。就是這個N,它老人家隨著地球重力分佈變化,因此很難確定具體數值。
3. NED座標系
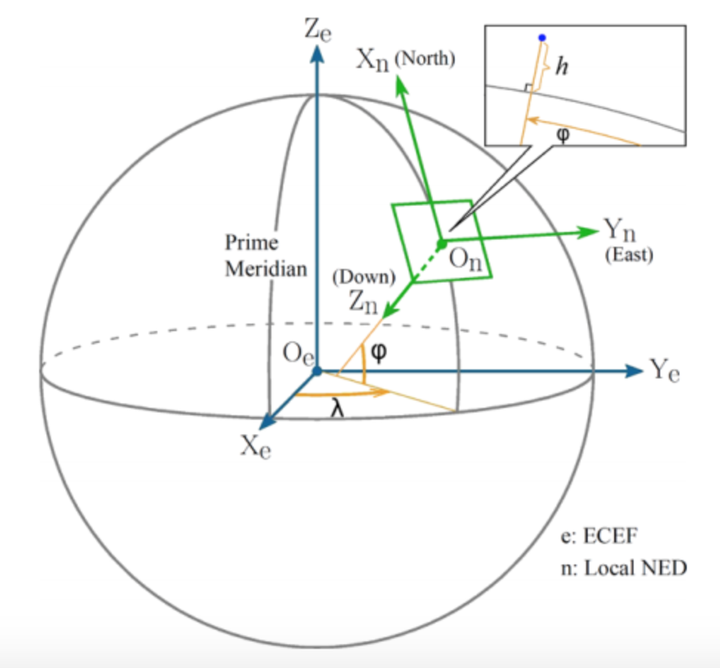
上圖很清晰的表明了ECEF座標系(藍色)和NED座標系(綠色)之間的關係。NED座標系是在導航計算時使用的座標系,
向量分別指向北,東,地,因此NED座標系也經常稱為’北東地座標系‘。
我們有了經緯度為什麼還需要NED座標系呢?GPS可以獲得在WGS-84中的速度向量,為了方便使用速度向量進行無人機控制,我們要把它轉換在無人機所在位置的“平面座標系”下——Local NED
4. 機體座標系
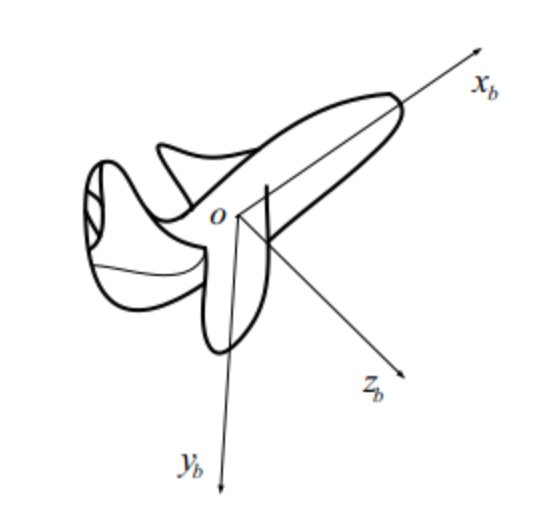
機體座標系與飛行器固聯,座標系符合右手法則,原點在飛行器重心處,x軸指向飛行器機頭前進方向,y軸由原點指向飛行器右側,z軸方向通過x,y由右手法則確定。
機體座標系是無人機慣性導航的基礎座標系,IMU中獲得的加速度狀態資訊就是該座標系下的數值。當我們獲取IMU輸出的x軸加速度資訊時不能直接應用在NED座標系下。
如果我們想要對無人機進行導航控制就必須能夠正確處理GPS,IMU等硬體輸出的資訊或者將這些信資訊轉化到正確的座標系下。MR.城堡會在後面的系列文章中為大家詳解無人機導航中的資料轉換與計算方法。
合作與諮詢請加工作室公眾號:CastleUAVStudio
MR.城堡為您提供涵蓋無人機技術分析與分享,無人機產品評測(參評、機評),行業分析等領域的專業內容
作者為環球網無人機頻道,深圳灣,UAVSNEWS等行業媒體特約撰稿人。著作權歸作者所有。商業轉載請聯絡作者獲得授權。
文中圖片來自於網際網路與相關文獻