
APM飛控學習之路:2 四旋翼的工作原理與系統組成
“一葉障目,不見泰山”。在研究四旋翼飛行器之前,有必要從整體介紹其工作原理、主要部件、技術名詞等基礎知識。不然就像羊入虎口,陷入一大堆不同層次的資料,難覓出口。接下我就拋磚引玉,儘自己所能,介紹四旋翼的工作原理和主要部件。餘雖不敏,然餘誠也。
工作原理
四旋翼飛行器,通過4個對稱佈置的電機,改變螺旋槳的轉速,實現升力的變化,進而控制飛行器的姿態和位置。姿態具體指3個尤拉角:橫滾(Roll)、俯仰(Pitch)、偏航(Yaw)。位置具體指1個高度油門(Throttle)和2個位置(X和Y)。尤拉角是一種描述物體姿態的常見方式,廣泛應用於慣性導航、機器人等領域。為了方便大家理解,在網上找了3個尤拉角的動圖,分別為Roll、Pitch、Yaw,讓我們致敬製作者3秒鐘。
橫滾:Roll,控制四旋翼左右運動。
俯仰:Pitch,控制四旋翼前後運動。
偏航:Yaw,控制四旋翼的朝向。
無人機的姿態和位置共有6個自由度,每個自由度的控制如下圖所示。4個電機2個正轉(電機2和4),2個反轉(電機1和3),對稱佈置。電機正反轉配合正反槳,可使螺旋槳的風都往下刮以平衡重力,同時抵消因槳葉旋轉帶來的空氣阻力扭矩。由於輸入只有4個自由度,因此多出的2個自由度是不完全受控的,其中俯仰運動和前後運動耦合,滾轉運動和側向運動耦合。
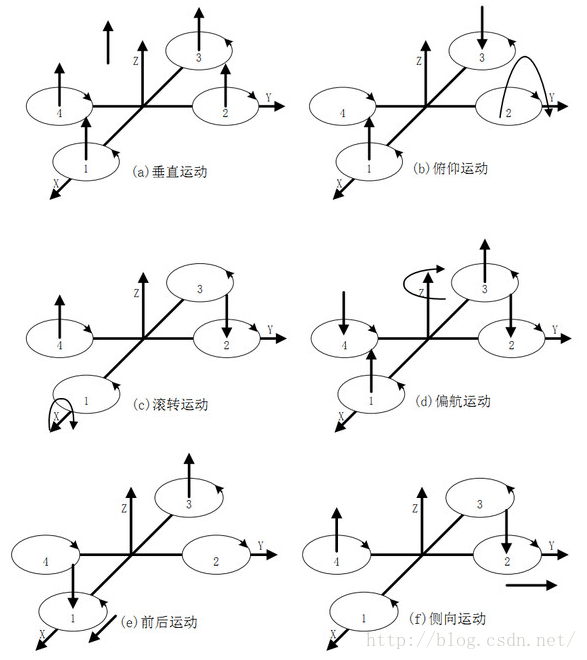
座標系:標準右手系。規定X軸正方向為前向。螺旋槳的箭頭向上↑:電機轉速上升。螺旋槳的箭頭向下↓:電機轉速下降。
(a) 垂直運動(Throttle):4個電機均加大馬力,螺旋槳產生的升力大於重力,飛機便垂直上升。當升力與重力平衡時,飛機便懸停。懸停是考驗演算法的重要一環,靠的是PID不斷反饋,調整轉速。
(b) 俯仰運動(Pitch):電機1加大馬力,電機3減小馬力,二者的變化量相同。1處升力變大,3處升力減小,重力仍保持平衡,但對Y軸產生一個力矩,機身繞Y軸旋轉,實現俯仰。
(c) 滾轉運動(Roll):與 (b) 原理相同,只是Y軸換成了X軸。
(d) 偏航運動(Yaw):電機1、3加大馬力,電機2、4減小馬力,二者的變化量相同。重力和繞X、Y軸的扭矩仍保持平衡,但要注意的是,根據作用力和反作用力原理,由於2個正轉的速度>2個反轉的速度,空氣阻力產生的扭矩不平衡了,使得機身繞Z軸旋轉,實現偏航。
(e) 前後運動:與 (b) 耦合,機身繞Y軸旋轉一定角度後,使得升力沿水平方向有了分量,實現前後運動。
(f) 側向運動:與 (c) 耦合,原理與 (e) 相同。
如果有朋友接觸過麥克納姆輪,也稱“全向輪”,那就更容易理解四旋翼的工作原理了。麥克納姆輪通過4個對稱佈置的電機和輪盤,可實現車身水平任意方向的移動和原地旋轉,無比靈活。

主要部件
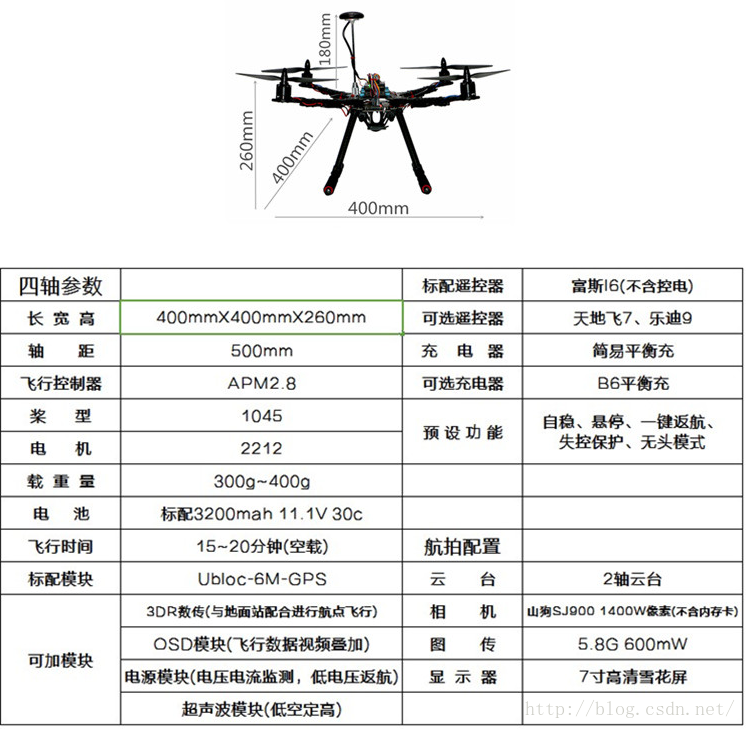
以S500為例,S500是一架入門級的四旋翼飛機,這裡的500指的是軸距(對角2個電機之間的距離),單位 :mm。對於開源愛好者而言,如果想一站式玩四旋翼,在某寶上選購一架S500是個不錯的選擇。下面我就從上表出發,詳細介紹四旋翼的主要部件和技術名詞。
四旋翼本體
四旋翼分2種模式,1種是+模式:飛行方向(機頭)與旋翼重合;1種是X模式:飛行方向(機頭)平分旋翼。 +模式:直觀,簡單,驅動弱,調參容易。 X模式:複雜,穩定,驅動好,調參麻煩。 對於四旋翼,穩定和驅動是第一位的,調參可以站在巨人的肩膀上,因此一般採用X模式。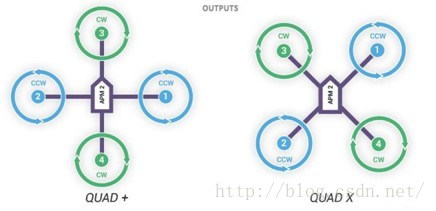
飛行控制器
飛行控制器簡稱飛控,是無人機的大腦。目前主要分開源和閉源兩派,開源飛控的鼻祖來自Arduino,著名的WMC飛控和APM飛控都是Arduino飛控的直接衍生品,APM全稱ArduPilotMega,其中的Ardu代表的就是Arduino。APM飛控是目前成熟度最高的開源飛控,但由於容量和計算量有限,在不久的將來一定會被更強大的PIX4、PIXHAWK所超越,成為一個時代的縮影。還有一些較為初級的飛控,如KK、QQ、玉兔等,在這就不贅述了。閉源飛控主要由商業公司推出,如DJI的工業級飛控A2、A3,入門級飛控Naza系列,還有零度的S4、X4和雙子星GEMINI。值得一提是其中的雙子星,是國內首個雙餘度安全飛行控制系統。隨著安全性的重視和提高,冗餘度設計也將成為無人機的標配。
螺旋槳
4個螺旋槳,2正槳(順時針轉)2反槳(逆時針轉),正反槳的風都向下吹,正反的目的主要是抵消螺旋槳的自旋。安裝的時候,無論正反槳,有字的一面均向上。槳型中1045這4位數字,前2位10代表槳的直徑(單位:英寸inch),後2位45代表槳的角度(單位:度°)。
電機
4個無刷電機,2正轉2反轉。2212這4位數字,前2位22代表電機轉子直徑,後2位12代表電機轉子高度,單位:毫米mm,注意均指電機轉子而非外殼。如果大家留心的話,電機外殼上一般會並註明這4位數字,除此之外,還會看到一個KV值,代表外加1V電壓時電機每分鐘空轉轉速。如“KV:900”代表外加1V電壓時,電機空轉時每分鐘轉900圈。常見的電機品牌有新西達(XXD)、朗宇(SunnySky)等,並且很多外殼上會有一串神祕字元:MADE IN CHINA。
電調
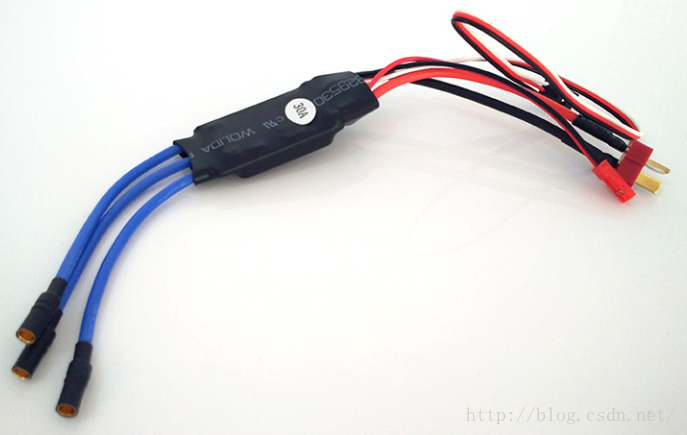
說完電機說電調,電調和電機配套使用,是飛控和電機之間的橋樑。電調全稱電子調速器(Electronic Speed Control),負責將飛控的控制訊號(PWM波)轉變為電流的大小,進而控制電機轉速。除了明面上的轉換功能,還能承載電機所需的大電流,以及將11.1V轉為5V供飛控和遙控模組使用(BEC輸出)。電調的主要引數是電流輸出能力,單位A,如30A代表電調能提供的最大電流為30A。常見的電調品牌有新西達(XXD)、中特威(ZTW)、好盈(HobbyWing)等。
電池
一般為鋰電池,因為同等電池容量鋰電池最輕。大家可以看到有3個引數:3200mAh 11.1V 30c。和手機電池一樣,3200mAh代表以3200mA電流放電,可持續1小時。11.1V代表電壓,一般由3節標準鋰電池組成(3.7V×3=11.1V),相應標識為3S。30c代表放電能力,在航模中是個重要引數,意味著可以3200mA×30的電流強度放電。說完了放電,還有充電,一般為2c充電,即充電電流可為3200mA×2。由於航模鋰電池採用多節標準鋰電池組成,而各節標準鋰電池之間存在充放電效能差異,因此充電器一般採用平衡充,避免某節電池過充。
遙控器
主要分美國手和日門手,美國手的油門在左邊,日本手的油門在右邊。在四旋翼的控制中,一般採用美國手。怎麼判斷油門呢?很簡單,遙控器左右2個搖桿中,推上去不回彈的是油門。也很好理解,油門一般穩定在一個位置就好了,回彈的話飛手會流淚。遙控器中也有1個神祕數字,6代表6通道,即遙控器可控的動作路數。因為四旋翼有4個自由度,所以遙控器至少需要4通道,剩餘的通道用於控制飛航模式等。
至此四旋翼的主要部件和技術名詞介紹完畢,還有一些可選部件,如數傳、OSD、雲臺、相機、圖傳等,待大家入門後即可自行挖掘。最後附上一個Exciting的TED視訊,震撼你的眼球。拉菲羅·安德烈:四軸飛行器靈活的運動性。
PS: 無人機系列的第2篇至此結束,接下來就會進入正題——APM飛控。欲知後事如何,且看下回分解。