
移動機器人gazebo模擬(3)—替換地圖並建圖
阿新 • • 發佈:2019-02-11
參考文章:
按照參考文章建立好地圖
然後根據如下步驟:
(1)路徑 .gazebo/models/robot_sim1 下

(2)在/usr/share/gazebo-7/worlds目錄下建立robot_sim1.world檔案,新增以下文字:
<?xml version="1.0" ?> <sdf version="1.5"> <world name="default"> <include> <uri>model://ground_plane</uri> </include> <include> <uri>model://sun</uri> </include> <include> <uri>model://robot_sim1</uri> </include> </world> </sdf>
這裡可能需要更改worlds資料夾的許可權:
$ sudo su
$ chmod -R 777 資料夾路徑<?xml version="1.0"?> <launch> <!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched --> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="worlds/robot_sim1.world"/> <!-- Note: the world_name is with respect to GAZEBO_RESOURCE_PATH environmental variable --> <arg name="paused" value="false"/> <arg name="use_sim_time" value="true"/> <arg name="gui" value="true"/> <arg name="headless" value="false"/> <arg name="debug" value="false"/> </include> </launch>
最後修改上篇部落格ros模擬建圖(2)中新建的檔案 my_world_hk.launch,將empty_world.launch替換為robot_sim1.launch
如下:(其中remap的那句語句可以修改成為/turtlebot/laser/scan 這樣資料就是hokuyo鐳射的資料了)
<launch> <arg name="world_file" default="$(env TURTLEBOT_GAZEBO_WORLD_FILE)"/> <arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!-- create, roomba --> <arg name="battery" value="$(optenv TURTLEBOT_BATTERY /proc/acpi/battery/BAT0)"/> <!-- /proc/acpi/battery/BAT0 --> <arg name="gui" default="true"/> <arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons --> <!--arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/--> <!-- kinect, asus_xtion_pro --> <arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR KinectHokuyo)"/> <!-- kinect, asus_xtion_pro --> <!--include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="use_sim_time" value="true"/> <arg name="debug" value="false"/> <arg name="gui" value="$(arg gui)" /> <arg name="world_name" value="$(arg world_file)"/> </include--> <include file="$(find gazebo_ros)/launch/robot_sim1.launch"> </include> <!--include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml"--> <include file="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/$(arg base).launch.xml"> <arg name="base" value="$(arg base)"/> <arg name="stacks" value="$(arg stacks)"/> <arg name="3d_sensor" value="$(arg 3d_sensor)"/> </include> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"> <param name="publish_frequency" type="double" value="30.0" /> </node> <!-- Fake laser --> <node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/> <node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan" args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager"> <param name="scan_height" value="10"/> <param name="output_frame_id" value="/camera_depth_frame"/> <param name="range_min" value="0.45"/> <remap from="image" to="/camera/depth/image_raw"/> <remap from="scan" to="/scan"/> </node> </launch>
儲存後執行
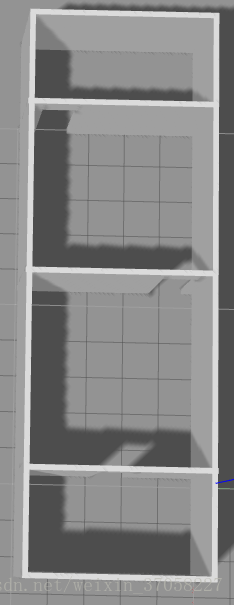
roslaunch robot_hokuyo_kinect my_world_hk.launch 發現turtlebot位置不對,(後來發現這只是特殊情況,再次重建地圖就沒有該問題了)

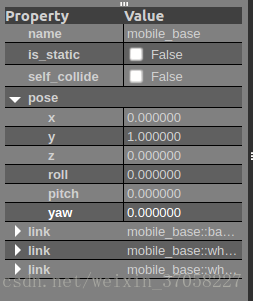
修改turtlebot的pose(位姿)

最後就可以根據前兩篇部落格使用gazeon和rviz進行建圖了
roslaunch robot_hokuyo_kinect my_world_hk.launch
roslaunch robot_hokuyo_kinect gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
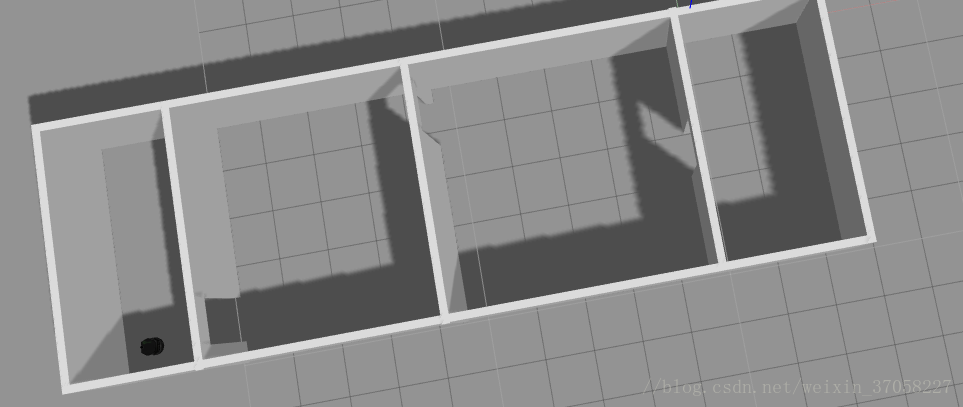
roslaunch turtlebot_teleop keyboard_teleop.launch 使用鍵盤控制機器人移動,建立地圖如下:

之後使用map_server儲存地圖
sudo apt-get install ros-kinetic-map-serverrosrun map_server map_saver -f /地址/mymap