
CANOpen,關於 DS402 電機驅動器的狀態切換(控制字&狀態字)
阿新 • • 發佈:2019-02-13
CANopen對於運動控制來說是一款優秀的通訊協議,採用了面向物件的一些設計思路,比如物件字典,過程資料物件(PDO),服務資料物件(SDO)等等。CANopen定義了完整的同步控制機制,使其成為主流的運動控制協議,除了在CAN總線上執行外,還被搬到了乙太網上(CANopen over Ethernet),形成了著名的PowerLink,EtherCat工業乙太網協議(CoE)。
一般支援ethercat的驅動器用的都是CoE協議,在配置好PDO後,ethercat的domain中包含了對映的Object Dictionary資料,通過讀寫domain即可讀寫物件字典中的對應資料,其中最主要的兩個引數( 控制字
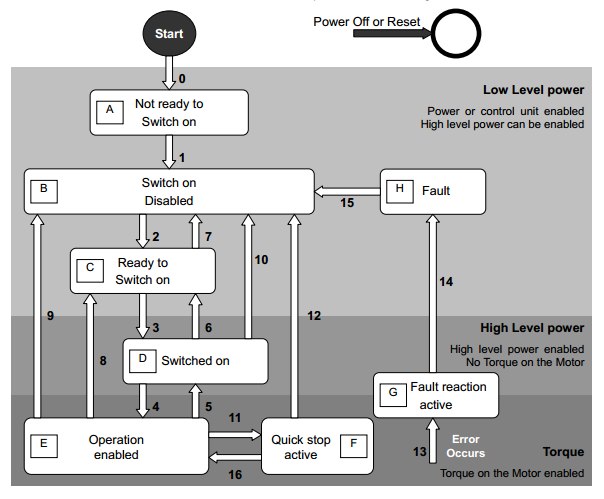
控制字用於控制驅動器的各種狀態切換(其中過程 0 和 過程 1 是還有 Error Occurs 都是自動切換的,其他狀態切換一般需要通過寫驅動器的控制字來完成):
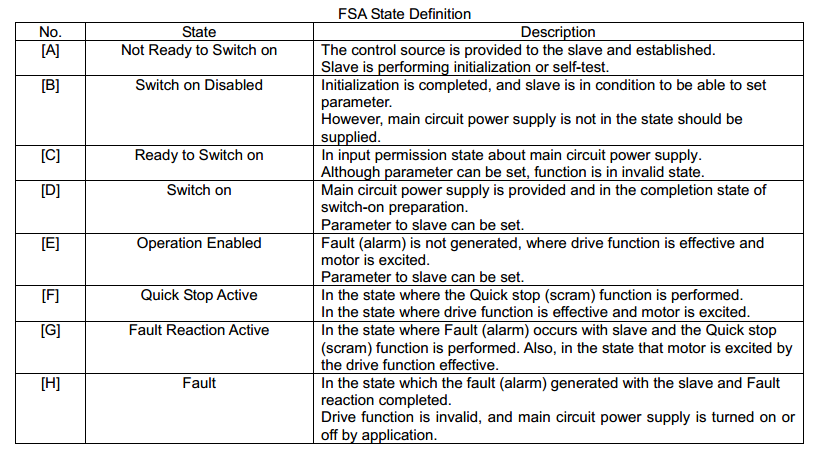
各個狀態的解釋如下:
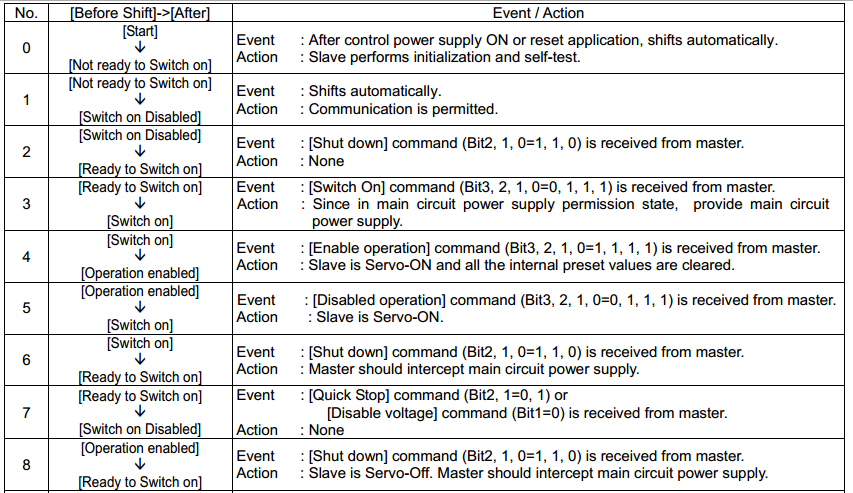
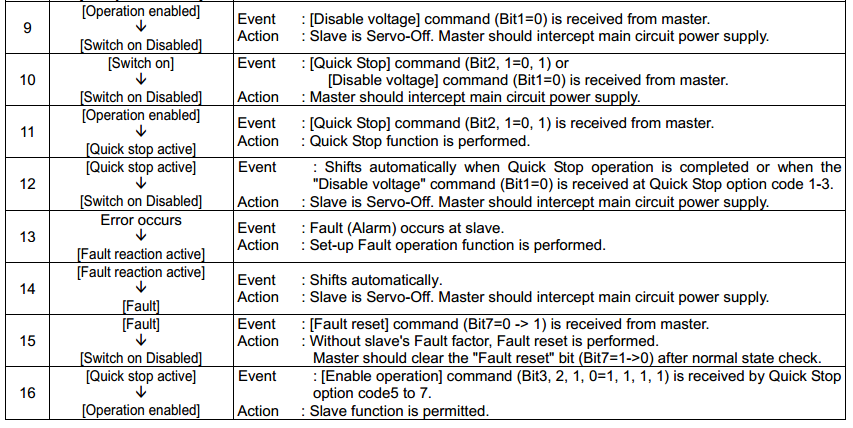
以下是各個狀態切換的條件,其中 Bit0、Bit1 等所指的是控制字的對應位:
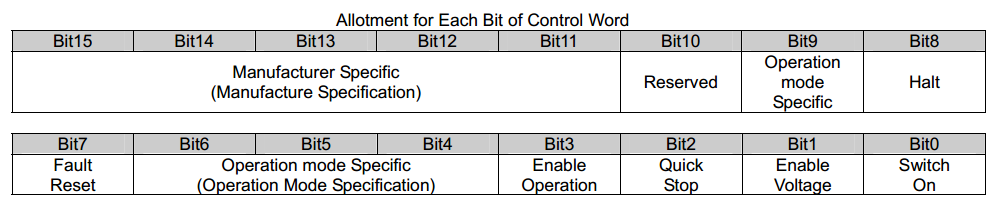
控制字各bit表示的含義:
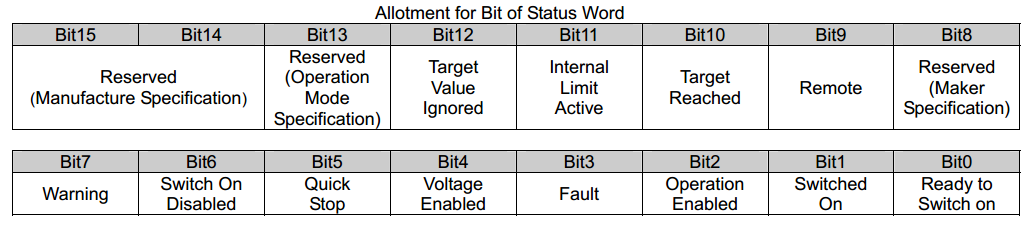
狀態字各bit表示的含義:
這是一段關於狀態遷移的簡易程式碼(讀狀態字並且寫控制字):
switch(cmd)
{
case ServoCommandOFF: // init value: If in Switch_On_Disabled state, change to Ready_To_Switch On