
遙感影像多光譜與全色IHS融合
阿新 • • 發佈:2019-02-13
目前常用的顏色模型一種是RGB三原色模型,另外一種廣泛採用的顏色模型是亮度、色調、飽和度((IHS)顏色模型。亮度表示光譜的整體亮度大小,對應於影象的空間資訊屬性,色調描述純色的屬性,決定於光譜的主波長,是光譜在質的方面的區別,飽和度表徵光譜的主波長在強度中的比例,色調和飽和度代表影象的光譜解析度。
IHS變換影象融合就是建立在IHS空間模型的基礎上,其基本思想就是在IHS空間中,將低空間解析度的多光譜影象的亮度分量用高空間解析度的灰度圖象替換。
IHS變換融合法基本流程:
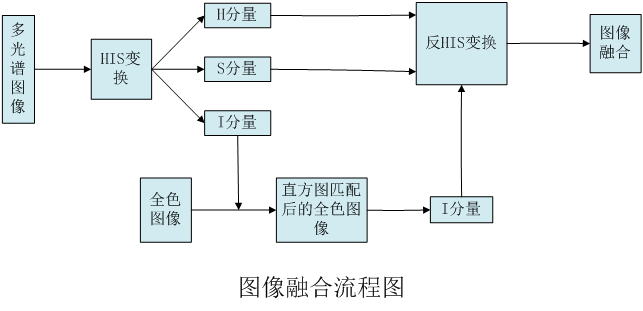
基本步驟:
(1) 將多光譜影像重取樣到與全色影像具有相同的解析度。
(2) 將多光譜影象的R、G、B三個波段轉換到IHS空間,得到I、H、S三個分量;
(3) 以I分量為參考,對全色影像進行直方圖匹配
(4) 用直方圖匹配後的全色影像替代I分量,然後同H、S分量一起逆變換到RGB空間,從而得到融合圖象,
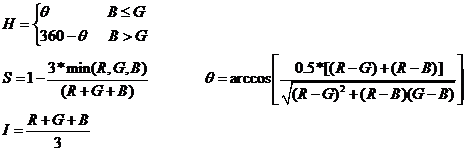
RGB與IHS變換的基本公式:
RGB->HIS:
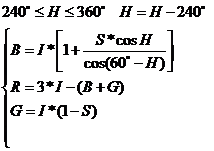
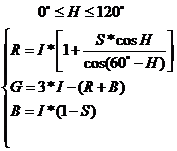
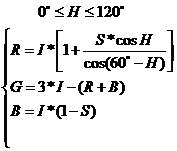
HIS->RGB:
程式碼:
void RGBtoHIS(uchar r,uchar g,uchar b,float* HIS)
{
float H;
float I;
float S;
float angle;
float R,G,B;
R=((float)r)/255.0; //歸一化
G=((float)g)/255.0;
B=((float)b)/255.0;
I=(R+G+B)/3.0;
S=1-min(min(R,G),B)/I;
if 程式碼主要包含了三個函式,顧名思義為從RGB->HIS、HIS->RGB和直方圖匹配三個函式,前兩個比較好搞定,直方圖匹配費了較大力氣,其中用了Qt和gdal, Qt主要是用來顯示。
“`