
kd-tree : k近鄰查詢和範圍查詢
想象一下我們有如下兩個任務:
- 我現在想騎一輛小黃車,我想查詢離我最近的k輛小黃車.
- 找到百度地圖中顯示在螢幕上區域中的所有酒店
這兩個任務均可以用kd-tree來解決
kd-tree 主要兩個用途:
- 查詢離某個點的最近的
k 個鄰居, - 搜尋某個區域內的所有點.
後者在計算幾何中稱為範圍查詢,例如查詢某個平面區域內的點的個數.
kd-tree是什麼玩意兒
kd-tree就是高維平衡樹……
kd-tree 是將平面點集進行一個分割,對某一個維度滿足左子樹和右子樹的偏序關係
若你只對程式碼感興趣請直接移動到文末
程式碼文末
建樹
以二維平面為例
在根節點以某一維度對點集進行分割,比如以
擴充套件到多維的情形則是:
每一層輪流選擇某一維度作為切割方向,找到沿著這一方向上的中位數節點,將其作為根,遞迴建樹則行
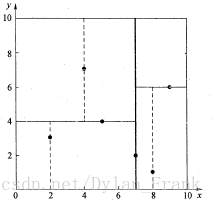
例項
假設有6個二維資料點{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},資料點位於二維空間內(如圖1中黑點所示)。k-d樹演算法就是要確定圖1中這些分割空間的分割線(多維空間即為分割平面,一般為超平面)。下面就要通過一步步展示k-d樹是如何確定這些分割線的。
k-NN 查詢
虛擬碼
k_close(p,o,k,)//查詢點p,樹當前節點o,近鄰數目k
1. 從根節點開始遞迴的查詢,根據p在節點的左邊還是右邊,決定遞迴方向
2. 若到達葉節點,則將其作為當前最優節點
3. 回溯:
(1) 若當前節點比當前最優點更優,則將其作為當前最優節點
(2) 判斷左子樹是否存在最優點,若有則遞迴下去
4. 當根節點搜尋完畢,則查詢結束
實現細節
具體實現的時候需要說明的是,可以用一個優先佇列儲存最優的k個節點,這樣每次比對回溯節點是否比當前最優點更優的時候,就只需用當前最優點中裡p最遠的節點來比對,而這個工作對於優先佇列來說是
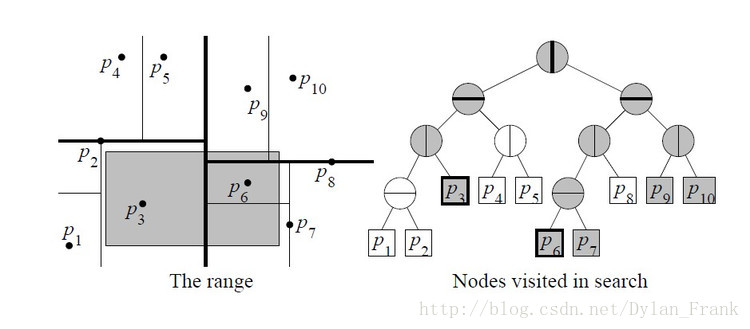
範圍查詢
給定一個平面矩形範圍,問其中有多少個點.如圖
虛擬碼
find(region,o)//範圍,當前節點
ret =0
if 葉子節點: ret += (o在region 內部) ,return
判斷當前節點是否在範圍內,在就+1
if 左子樹在其內部 報告左子樹內所有節點,
else 判斷是否與左子樹相交,若是則遞迴進入左子樹,查詢ret += (region,lc)
右子樹同理
複雜度
範圍查詢複雜度
由於kd-tree每一層都是對平面的劃分,我們考慮其孫子輩節點.查詢只會對那些與其相交的節點遞迴查詢,因此只需要判斷相交區域數目就行了,
如下圖
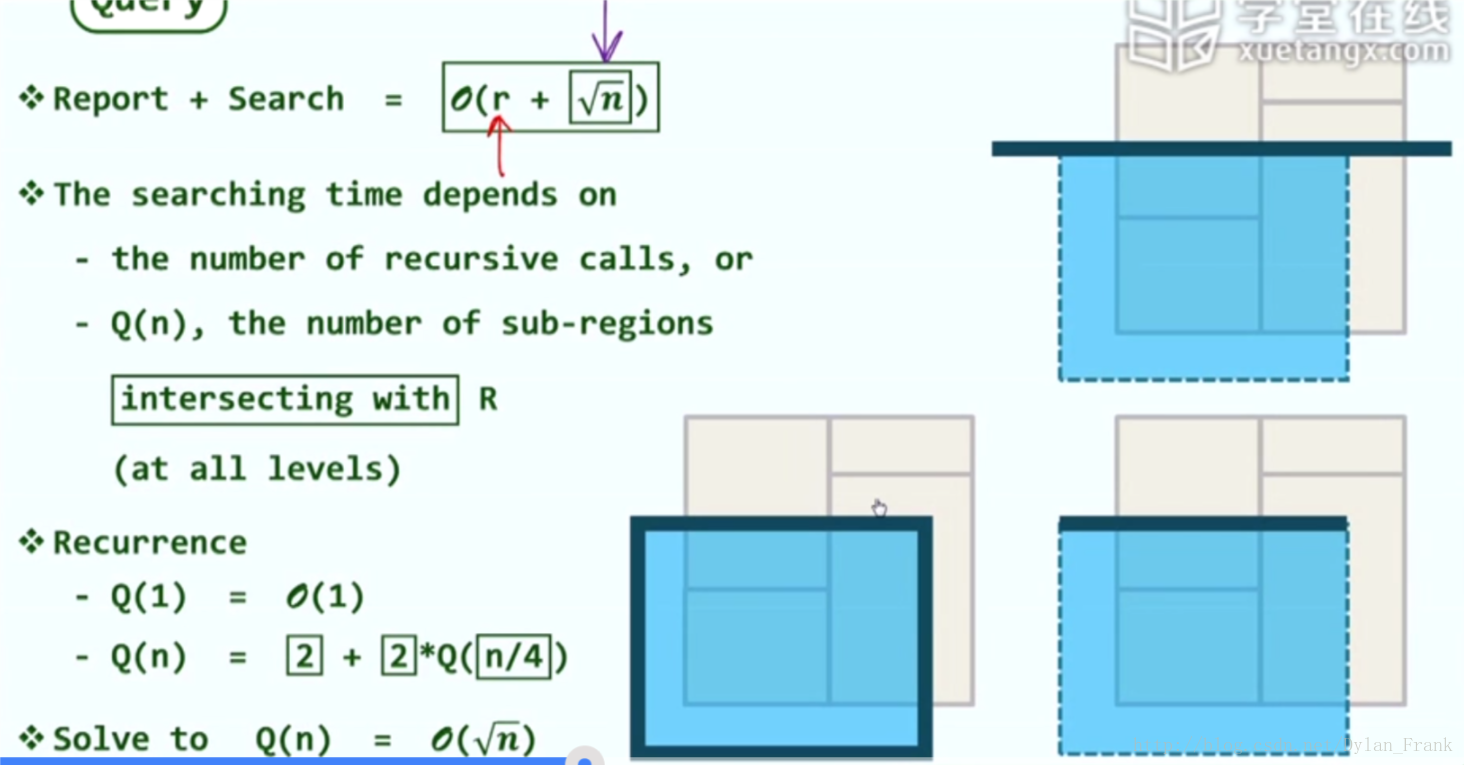
將其中一條邊延展出去後至多會與兩個區域相交,因此:
可以解出
範圍查詢的優化
我們會發現有很多遞迴都是不需要的因為,有些時候某個子節點的區域已經完全包含其中了
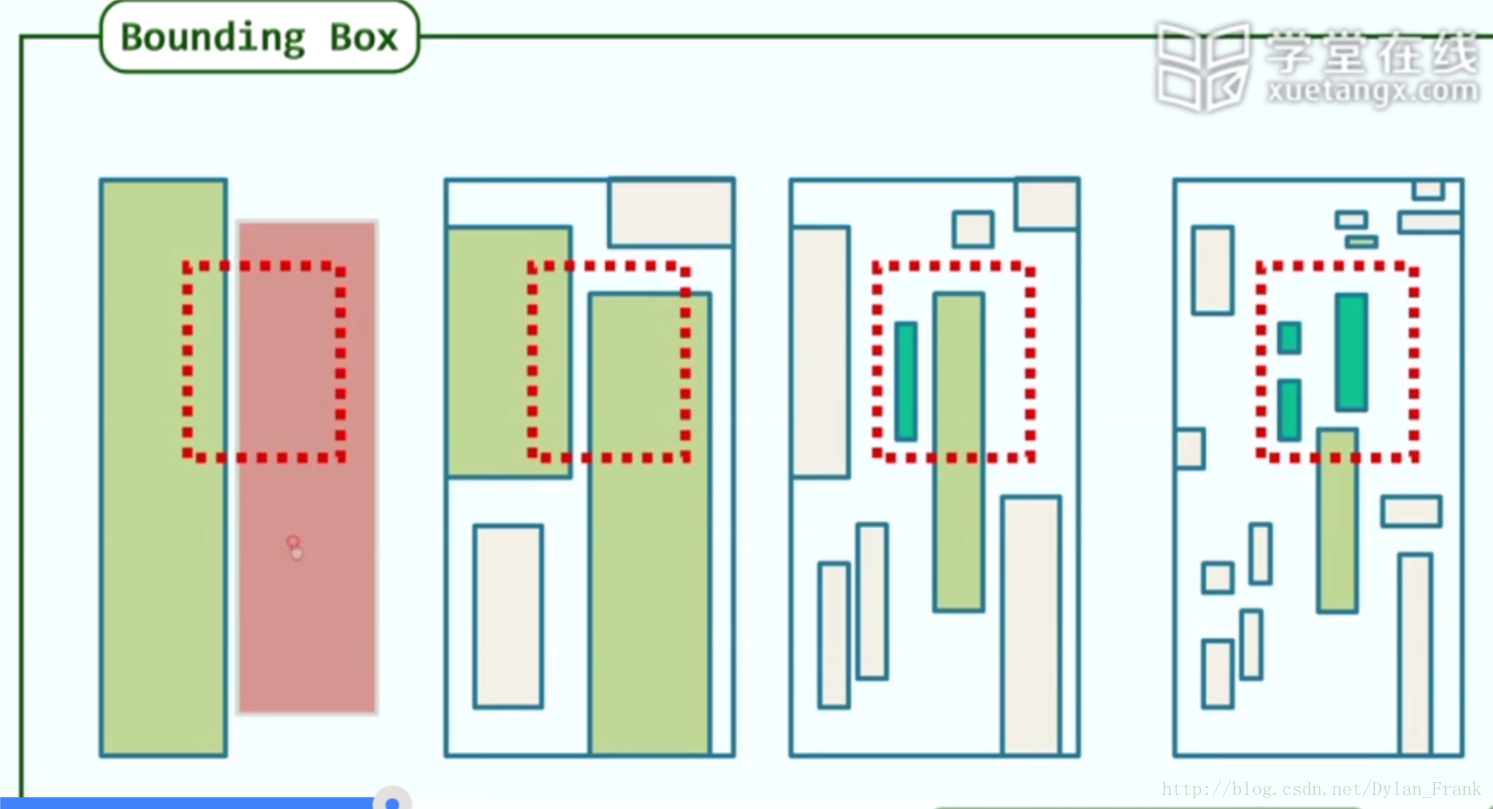
所以我們可以在節點中記錄他相應管轄的區域,這樣就能提前終止遞迴了.
詳細程式碼見文末
超出2d
不難發現在更高緯度的時候也是一樣的,我們按照每個緯度切分一次就行了,
不過複雜度會有所提高,
一般的在d維空間中進行範圍查詢的複雜度是
程式碼
本程式碼 k_close 查詢經過HDU 4347 測試
那個題是在5維空間中查詢k-NN,給的時限是8s

AC程式碼
範圍查詢部分,只經過個人資料測試,未在oj 測試,若有題目請聯絡
限於本人c++有限,設計的不夠好.
int _idx;//比較維度
struct KDNode{
const static int max_dims = 5;
int featrue[max_dims];
int size;//子樹節點個數
int region[max_dims][2];//每個維度最大值最小值
int dim;
bool operator < (const KDNode& o)const{
return featrue[_idx]<o.featrue[_idx];
}
};
struct KDTree{
int dims;
KDNode Node[maxn];
KDNode data[maxn<<2];
bool flag[maxn<<2];
priority_queue<pair<int,KDNode> > Q;//查詢結果佇列
void build(int l,int r,int o,int dep,bool clc_region = false){
//最後一個引數表明是否記錄區域大小
if(l>r)return;
_idx = dep % dims;
int lc = o<<1,rc = o<<1|1;
flag[o] = true;
flag[lc]=flag[rc] = 0;
int mid = (l+r) >> 1;
nth_element(Node+l,Node+mid,Node+r+1);
data[o] = Node[mid];data[o].dim = _idx;
// std::cout <<"node "<< o << '\n';
// std::cout << _idx << '\n';
// for(int i=0 ; i<dims ; ++i)std::cout << data[o].featrue[i] << ' ';std::cout << '\n';
data[o].size = r-l+1;
if(clc_region){
for(int i=0 ; i<dims ; ++i){
_idx = i;
data[o].region[i][0] = min_element(Node+l,Node+r+1)->featrue[i];
data[o].region[i][1] = max_element(Node+l,Node+r+1)->featrue[i];
}
_idx = dep%dims;
}
build(l,mid-1,lc,dep+1,clc_region);
build(mid+1,r,rc,dep+1,clc_region);
}
void k_close(const KDNode& p,int k,int o){
if(!flag[o])return;
int dim = data[o].dim;
int lc = o<<1;int rc = o<<1|1;
if(p.featrue[dim] >data[o].featrue[dim])swap(lc,rc);
if(flag[lc])k_close(p,k,lc);
pair<int,KDNode> cur(0,data[o]);
for(int i=0 ; i<dims ; ++i)cur.fi+=SQ(p.featrue[i]-data[o].featrue[i]);
bool fg = false;//右子樹遍歷標誌
if(Q.size() < k){
Q.push(cur);fg =1;
}else{
if(cur.fi < Q.top().fi){
Q.pop();Q.push(cur);
}
fg = SQ(p.featrue[dim]-data[o].featrue[dim]) < Q.top().fi;
}
if(flag[rc] && fg)k_close(p,k,rc);
}
int check(int region[][2],int o){
//1表示相交
//-1表示全屬於
//0表示不相交
if(!flag[o])return 0;
bool fg = true;
for(int i=0 ; i<dims ; ++i){
if(data[o].region[i][0] < region[i][0] || data[o].region[i][1] > region[i][1]){
fg = false;break;
}
}
int d = data[o].dim;
return fg?-1 : data[o].region[d][1] > region[d][0] || data[o].region[d][0]<region[d][1];
}
int find_size(int region[][2],int o){
//查詢範圍內的點數
//預設建樹時有region記錄
if(!flag[o])return 0;
int ret =0;
bool fg =1 ;//當前點是否在範圍內
for(int i=0 ; i<dims ; ++i)
if(data[o].featrue[i]<region[i][0]||data[o].featrue[i]>region[i][1]){
fg = 0;break;
}
ret += fg;
int lc = o<<1,rc = o<<1|1;
int lstate = check(region,lc),rstate = check(region,rc);
if(lstate ==-1)ret += data[lc].size;
else if(lstate == 1)ret += find_size(region,lc);
if(rstate ==-1)ret += data[rc].size;
else if(rstate == 1)ret += find_size(region,rc);
return ret;
}
};侷限
以上只是一顆靜態樹不支援加點和刪除.