【CUDA】CUDA9.0+VS2017+win10詳細配置
CUDA9.0是目前最新的Cuda版本,VS2017也是目前最新的Visual Studio版本,當前(2017/09)網上很少有CUDA9.0+VS2017的配置。
為什麼非要用CUDA9.0呢?因為CUDA8.0是與VS2017不相容的,就是說如果想用CUDA8.0,必須使用VS2015以下的VS版本。好訊息是CUDA9.0開始相容VS2017,以後CUDA9.0+VS2017將會成為一種趨勢。
在參考以前的成功配置案例後,博主決定寫寫最新的配置教程,以供大家參考。
CUDA9.0安裝:
CUDA(Compute Unified Device Architecture),是顯示卡廠商NVIDIA推出的運算平臺。 CUDA™是一種由NVIDIA推出的通用平行計算架構,該架構使GPU能夠解決複雜的計算問題。 它包含了CUDA指令集架構(ISA)以及GPU內部的平行計算引擎。 開發人員現在可以使用C語言來為CUDA™架構編寫程式,C語言是應用最廣泛的一種高階程式語言。所編寫出的程式於是就可以在支援CUDA™的處理器上以超高效能執行。
下載後我們將會得到這個exe檔案:

下面是安裝過程(按照預設安裝):
在安裝CUDA9.0之前,本人已經是安裝好了VS2017,所以系統檢查時顯示無誤,綠燈通過。
接下來就是同意繼續下一步,等待CUDA安裝的結束。
PS:如果要解除安裝舊版本的CUDA,可在控制面板中選擇“程式和功能”,選擇應用程式後右鍵解除安裝。至於登錄檔問題是否需要變動,博主解除安裝CUDA8.0後安裝CUDA9.0並未發現問題。如果大家在安裝過程中遇到問題,可百度或谷歌如何操作。
設定環境變數:
安裝結束後,我們在計算機上點右鍵,開啟屬性->高階系統設定->環境變數,可以看到系統中多了CUDA_PATH和CUDA_PATH_V9_0兩個環境變數。

我們還需要在環境變數中新增如下幾個變數:
CUDA_SDK_PATH = C:\ProgramData\NVIDIA Corporation\CUDA Samples\v9.0
CUDA_LIB_PATH = %CUDA_PATH%\lib\x64
CUDA_BIN_PATH = %CUDA_PATH%\bin
CUDA_SDK_BIN_PATH = %CUDA_SDK_PATH%\bin\win64
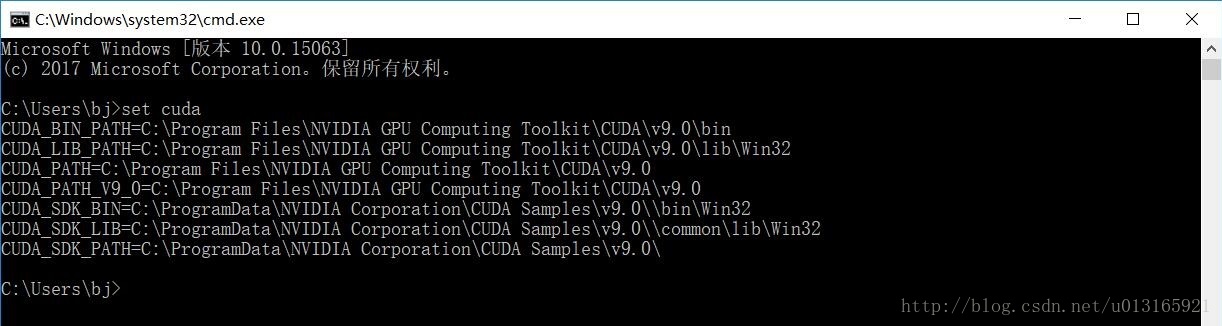
CUDA_SDK_LIB_PATH = %CUDA_SDK_PATH%\common\lib\x64 設定完成之後,我們可以開啟cmd來檢視。
下一步是監測cuda安裝成功與否:
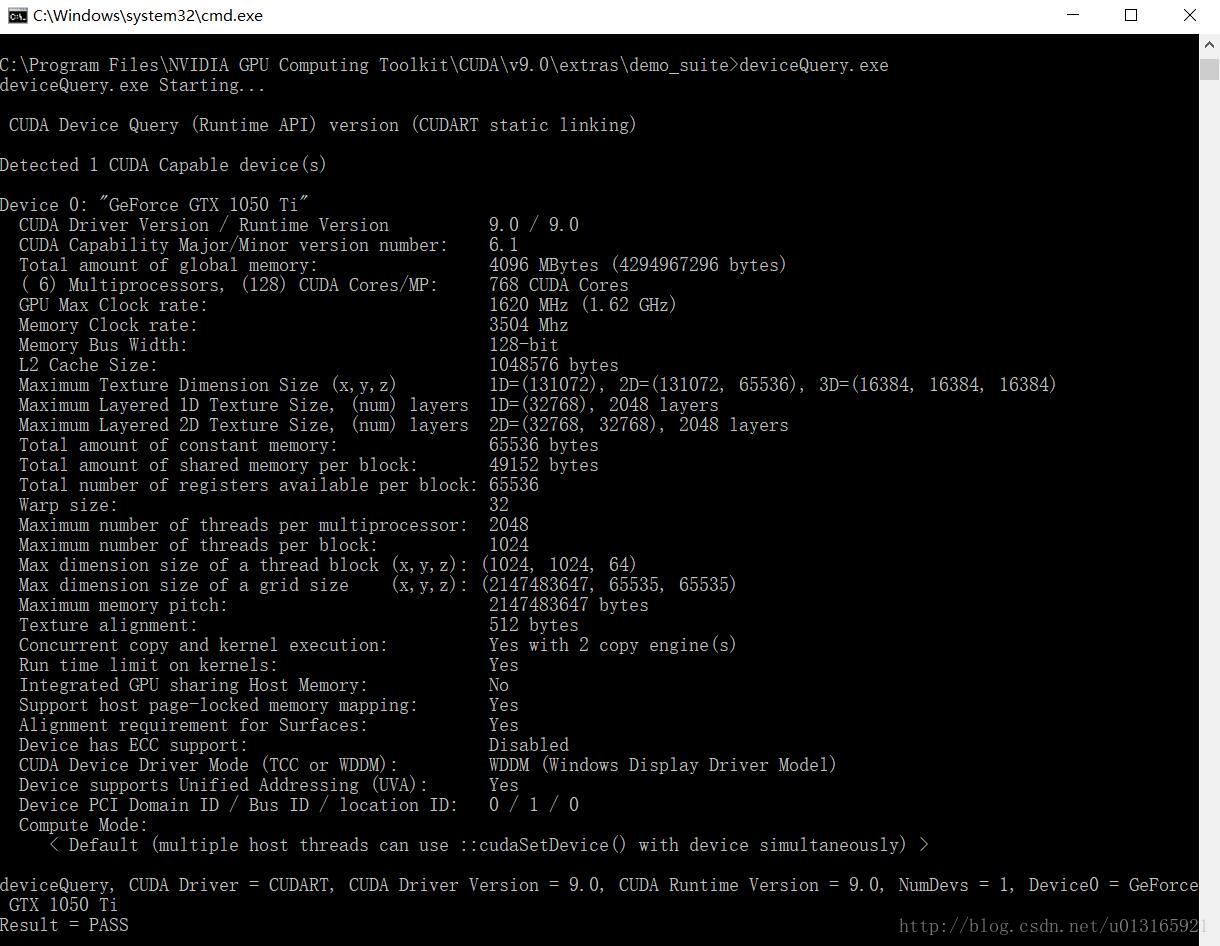
在cuda安裝資料夾中有deviceQuery.exe 和 bandwidthTest.exe兩個程式。首先啟動cmd DOS命令視窗,預設進來的是c:\users\Admistrator>路徑,輸入 cd .. 兩次,來到c:目錄下輸入dir 找到安裝的cuda資料夾。
分別輸入deviceQuery.exe 和 bandwidthTest.exe,執行結果如圖所示。Rsult=PASS則說明通過,反之,Rsult=Fail 則需要重新安裝。
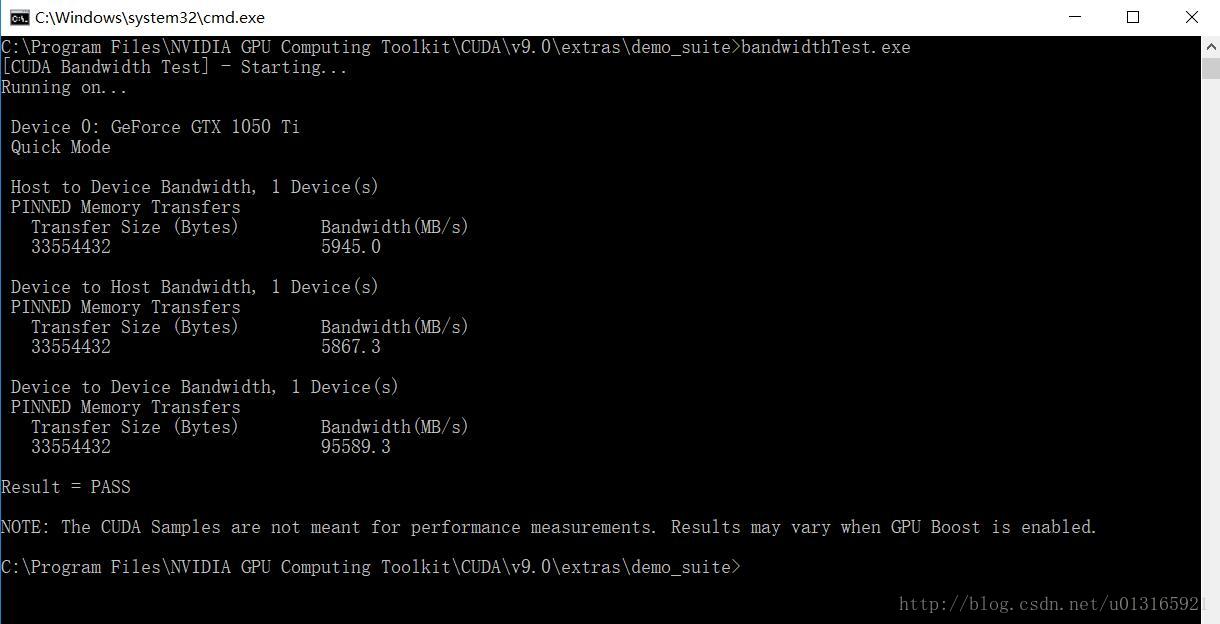
如果以上都沒問題,則說明CUDA9.0安裝成功。下一步是在VS2017平臺上配置CUDA9.0。
VS2017配置:
1.開啟vs2017,我們可以觀察到,在VS2017模板一欄下方出現了“NVIDIA/CUDA 9.0”。建立一個空win32程式,即cuda_test專案。

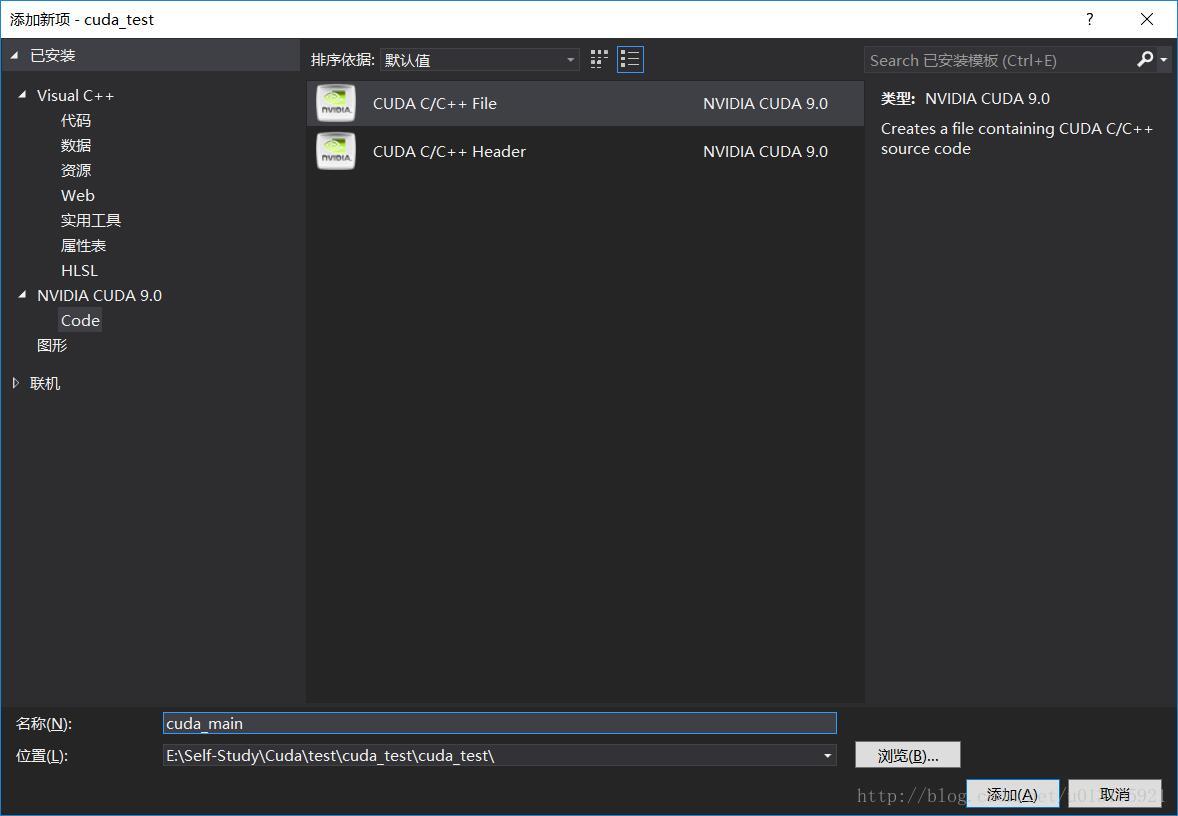
2.右鍵原始檔資料夾->新增->新建項->選擇CUDA C/C++File,取名cuda_main。
3.選擇cuda_test,點選右鍵–>專案依賴項–>自定義生成,選擇CUDA9.0。

4.點選cuda_main.cu的屬性,在配置屬性–>常規–>項型別–>選擇“CUDA C/C++”。

專案配置:
1.x64
1.1 包含目錄配置
1.右鍵點選專案屬性–>屬性–>配置屬性–>VC++目錄–>包含目錄
2.新增包含目錄:
$(CUDA_PATH)\include
1.2 庫目錄配置
1.VC++目錄–>庫目錄
2.新增庫目錄:
$(CUDA_PATH)\lib\x64
1.3 依賴項
配置屬性–>連結器–>輸入–>附加依賴項
新增庫檔案:
cublas.lib
cuda.lib
cudadevrt.lib
cudart.lib
cudart_static.lib
nvcuvid.lib
OpenCL.lib
注意:新增nvcuvenc.lib庫檔案,編譯時,報找不到該檔案的錯誤。去掉後,程式也能執行
2.x86(win32)
2.1 包含目錄配置
右鍵點選專案屬性–>屬性–>配置屬性–>VC++目錄–>包含目錄
新增包含目錄:
$(CUDA_PATH)\include
2.2 庫目錄配置
1.VC++目錄–>庫目錄
2.新增庫目錄:
$(CUDA_PATH)\lib\Win32
2.3 依賴項
配置屬性–>聯結器–>輸入–>附加依賴項
新增庫檔案:
cuda.lib
cudadevrt.lib
cudart.lib
cudart_static.lib
nvcuvid.lib
OpenCL.lib
備註: win32和x64位的lib庫有差別,配置時需注意,除了上述新增的lib檔案外,x64還有其他的lib庫檔案,如cublas.lib,如執行1.6的樣例時,要新增這個庫,不然會編譯失敗。
測試
// CUDA runtime 庫 + CUBLAS 庫
#include "cuda_runtime.h"
#include "cublas_v2.h"
#include <time.h>
#include <iostream>
using namespace std;
// 定義測試矩陣的維度
int const M = 5;
int const N = 10;
int main()
{
// 定義狀態變數
cublasStatus_t status;
// 在 記憶體 中為將要計算的矩陣開闢空間
float *h_A = (float*)malloc (N*M*sizeof(float));
float *h_B = (float*)malloc (N*M*sizeof(float));
// 在 記憶體 中為將要存放運算結果的矩陣開闢空間
float *h_C = (float*)malloc (M*M*sizeof(float));
// 為待運算矩陣的元素賦予 0-10 範圍內的隨機數
for (int i=0; i<N*M; i++) {
h_A[i] = (float)(rand()%10+1);
h_B[i] = (float)(rand()%10+1);
}
// 列印待測試的矩陣
cout << "矩陣 A :" << endl;
for (int i=0; i<N*M; i++){
cout << h_A[i] << " ";
if ((i+1)%N == 0) cout << endl;
}
cout << endl;
cout << "矩陣 B :" << endl;
for (int i=0; i<N*M; i++){
cout << h_B[i] << " ";
if ((i+1)%M == 0) cout << endl;
}
cout << endl;
/*
** GPU 計算矩陣相乘
*/
// 建立並初始化 CUBLAS 庫物件
cublasHandle_t handle;
status = cublasCreate(&handle);
if (status != CUBLAS_STATUS_SUCCESS)
{
if (status == CUBLAS_STATUS_NOT_INITIALIZED) {
cout << "CUBLAS 物件例項化出錯" << endl;
}
getchar ();
return EXIT_FAILURE;
}
float *d_A, *d_B, *d_C;
// 在 視訊記憶體 中為將要計算的矩陣開闢空間
cudaMalloc (
(void**)&d_A, // 指向開闢的空間的指標
N*M * sizeof(float) // 需要開闢空間的位元組數
);
cudaMalloc (
(void**)&d_B,
N*M * sizeof(float)
);
// 在 視訊記憶體 中為將要存放運算結果的矩陣開闢空間
cudaMalloc (
(void**)&d_C,
M*M * sizeof(float)
);
// 將矩陣資料傳遞進 視訊記憶體 中已經開闢好了的空間
cublasSetVector (
N*M, // 要存入視訊記憶體的元素個數
sizeof(float), // 每個元素大小
h_A, // 主機端起始地址
1, // 連續元素之間的儲存間隔
d_A, // GPU 端起始地址
1 // 連續元素之間的儲存間隔
);
cublasSetVector (
N*M,
sizeof(float),
h_B,
1,
d_B,
1
);
// 同步函式
cudaThreadSynchronize();
// 傳遞進矩陣相乘函式中的引數,具體含義請參考函式手冊。
float a=1; float b=0;
// 矩陣相乘。該函式必然將陣列解析成列優先陣列
cublasSgemm (
handle, // blas 庫物件
CUBLAS_OP_T, // 矩陣 A 屬性引數
CUBLAS_OP_T, // 矩陣 B 屬性引數
M, // A, C 的行數
M, // B, C 的列數
N, // A 的列數和 B 的行數
&a, // 運算式的 α 值
d_A, // A 在視訊記憶體中的地址
N, // lda
d_B, // B 在視訊記憶體中的地址
M, // ldb
&b, // 運算式的 β 值
d_C, // C 在視訊記憶體中的地址(結果矩陣)
M // ldc
);
// 同步函式
cudaThreadSynchronize();
// 從 視訊記憶體 中取出運算結果至 記憶體中去
cublasGetVector (
M*M, // 要取出元素的個數
sizeof(float), // 每個元素大小
d_C, // GPU 端起始地址
1, // 連續元素之間的儲存間隔
h_C, // 主機端起始地址
1 // 連續元素之間的儲存間隔
);
// 列印運算結果
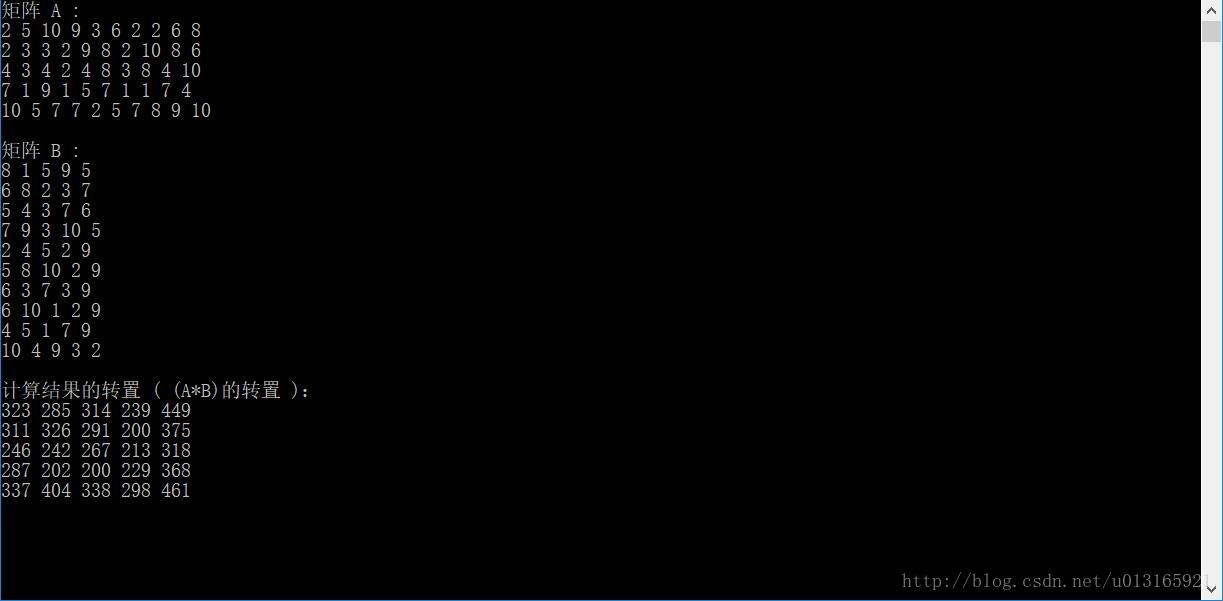
cout << "計算結果的轉置 ( (A*B)的轉置 ):" << endl;
for (int i=0;i<M*M; i++){
cout << h_C[i] << " ";
if ((i+1)%M == 0) cout << endl;
}
// 清理掉使用過的記憶體
free (h_A);
free (h_B);
free (h_C);
cudaFree (d_A);
cudaFree (d_B);
cudaFree (d_C);
// 釋放 CUBLAS 庫物件
cublasDestroy (handle);
getchar();
return 0;
} 執行結果如圖所示,說明配置已經完成且能正常執行程式。