目標跟蹤演算法--Staple: Complementary Learners for Real-Time Tracking
文章下載連結:文章下載連結
程式碼下載連結:Staple程式碼
————————————————————————————————————————————
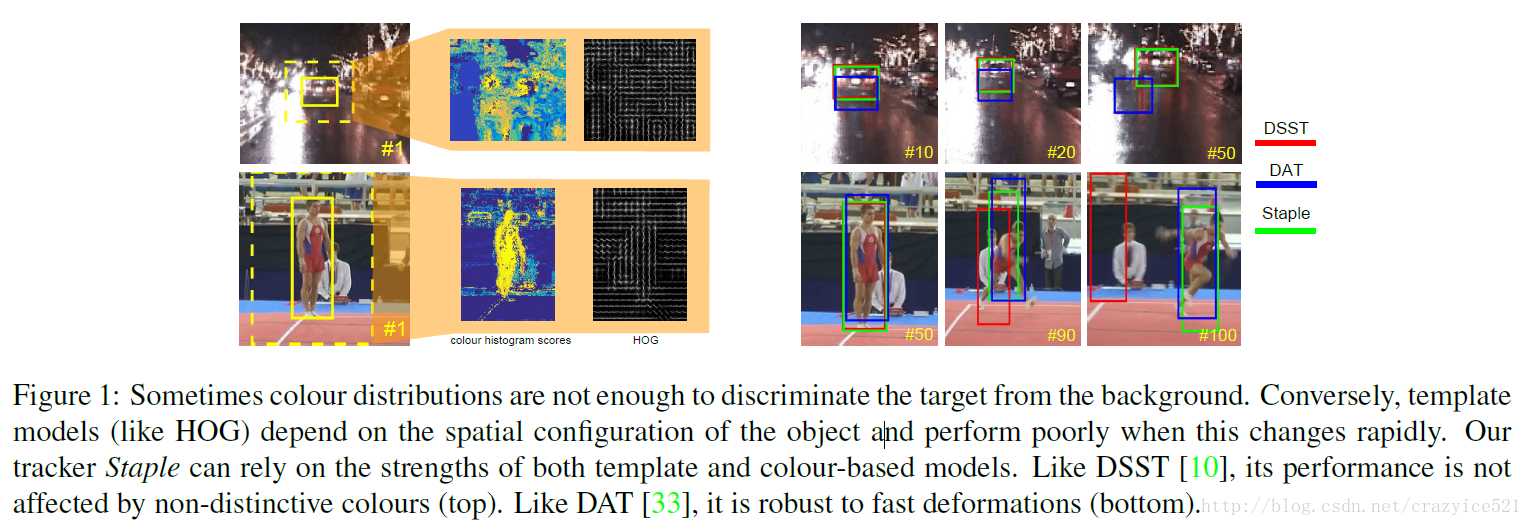
今天要講的這篇文章也是基於相關濾波器(不懂相關濾波器的請看我前一篇文章)進行改進的一篇文章,發表在2016年CVPR上面,提出了一個新的想法,融合演算法,使用HOG-KCF+color-KCF結合演算法對目標進行跟蹤,HOG特徵對形變和運動模糊比較敏感,但是對顏色變化能夠達到很好的跟蹤效果,color特徵對顏色比較敏感,但是對形變和運動模糊能夠有很好的跟蹤效果,同時使用兩者融合能夠解決大部分跟蹤過程當中遇到的問題。作者在文章的開頭就放出來這張圖,圖中很明顯的可以看出,當顏色對目標影響過大時候(圖中第二行),DSST對目標跟蹤效果較好,當運動模糊對目標影響過大(圖中第一行)DAT對目標跟蹤效果較好。
Abstract
近些年來,基於相關濾波跟蹤器的演算法得到了很大的改進,已經能夠達到很好的跟蹤效果,14年的KCF,15年的SRDCF、HCF等演算法,都已經達到了很高的精度,像HCF已經在OTB-50上達到了0.89的效果,但是美中不足的就是使用了深度學習特徵之後速度相對來說比較慢一點,不能達到實時的要求。本文作者經過研究發現,以前演算法的模型的學習還是很依賴於跟蹤目標的空間資訊,對變形的目標跟蹤效果不是很好,但是使用顏色特徵對目標進行學習能夠很好的處理跟蹤目標發生形變和運動模糊的問題,但是當光照條件變化的時候,顏色特徵就表現的相對無力,這個時候使用HOG特徵能夠對光照變化的跟蹤目標進行很好的跟蹤。所以,作者就想到,使用一個融合互補因子在同一個迴歸框架當中能夠很好的對這些因素進行很好的處理同時能夠達到比較快的速度,80FPS,並且在跟蹤效果上面也比大部分現有的跟蹤演算法效果要好。
本文演算法思想

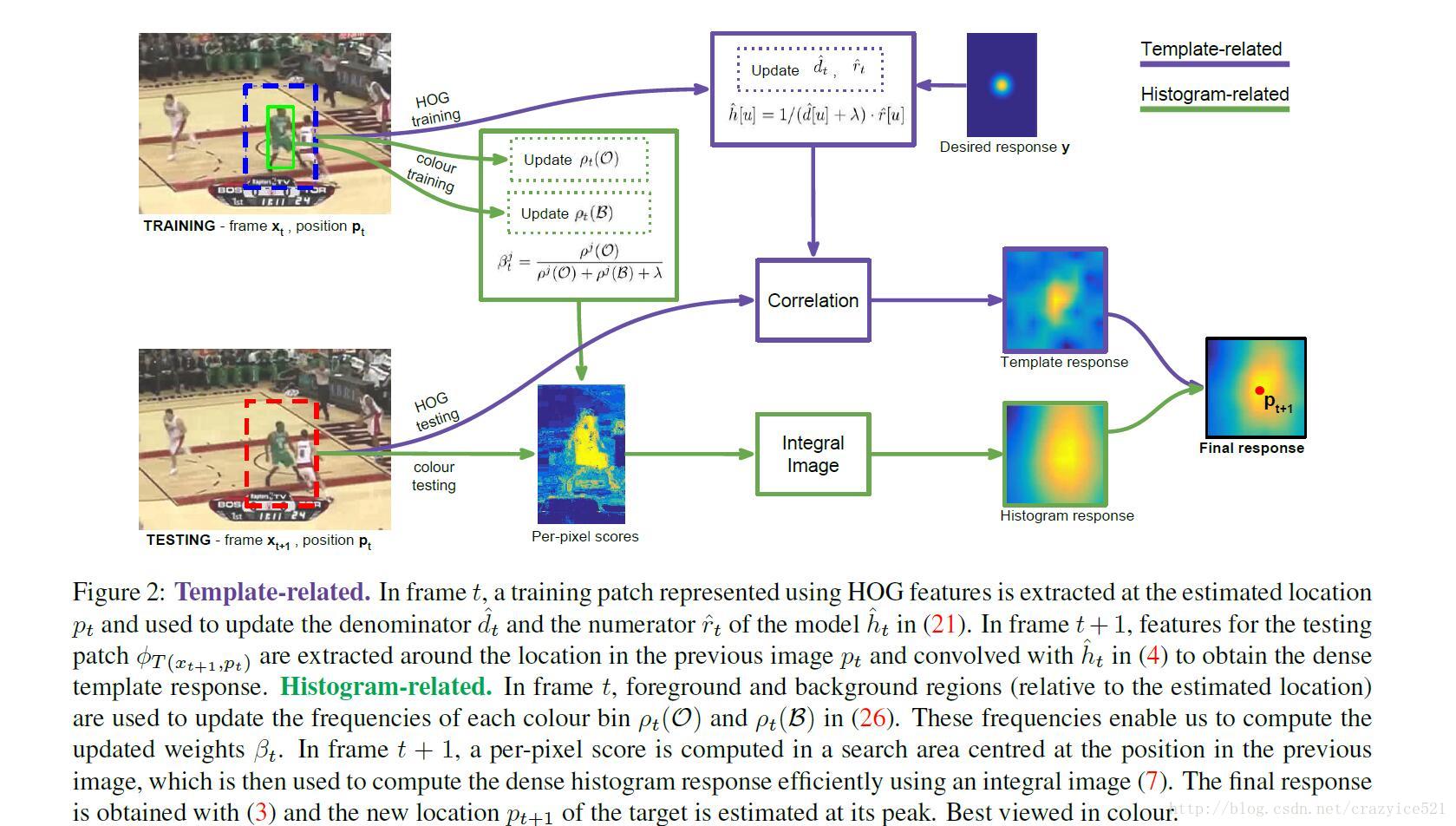
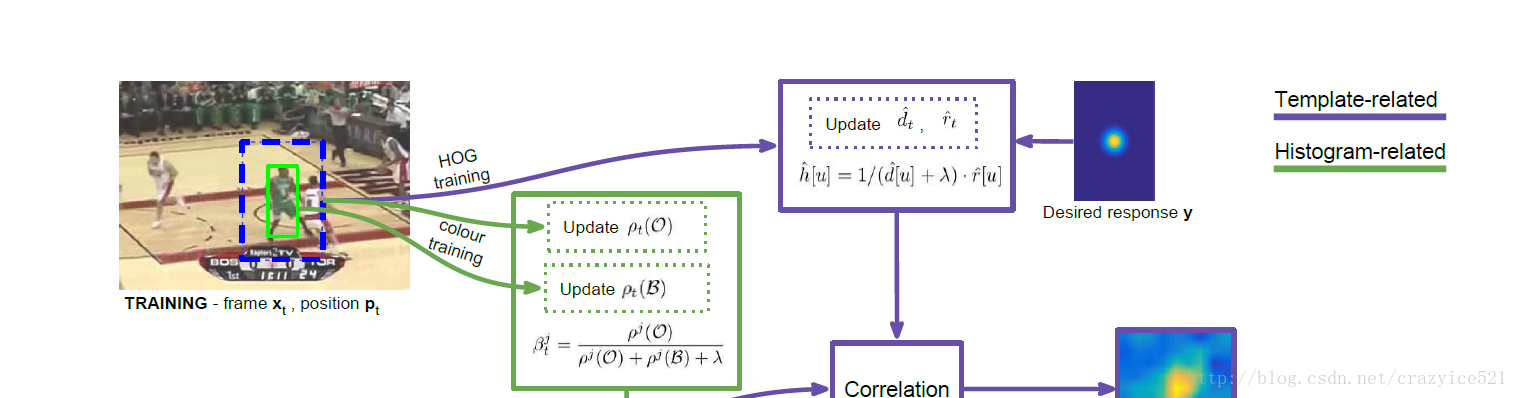
這裡說一下這個文章的框架思想,有助於看文章的小夥伴理解,首先先看上面一部分,就是這部分我截圖出來的區域,
先看紫色的線,先自動忽略綠色的線,上面這部分就是訓練部分,當我們輸入一張圖片的時候,使用HOG特徵對目標圖片進行特徵提取供我們的濾波器進行使用,學習。得到特徵之後,根據相關濾波器的學習規則學習得到濾波模版,使用給定公式更新模版,藍色的線學習結束;
接下來看綠色的線,綠色的線就是使用顏色特徵對濾波模板進行學習,然後使用給定的更新公式對學習到的模板進行更新,綠色線學習完畢。
接下來就看下半部分,下半部分就是跟蹤過程,上面學習了濾波器,怎麼使用呢?就是下面這半部分了,首先基於上一幀學習到的位置pt處,使用給定大小的目標框標出大致目標位置所在,然後使用學習得到的兩個濾波器模板對目標分別學習,就是圖中紫色的線和綠色的線,紫色的線就是使用HOG模板學習的跟蹤器對目標跟蹤的結果,綠色的就是使用Color特徵對目標圖片學習的結果。然後得到對應的response map,使用給定的規則

本文創新點
正如我前面所說的一樣,作者在探究到這些因素之後,對整個影響因素和對跟蹤器改變造成的變化之後決定使用融合因子的演算法對目標進行跟蹤。使用HOG特徵和COLOR特徵兩種互補的特徵因子對目標進行學習,融合跟蹤結果,能夠互補解決對方不能解決的問題,從而提升跟蹤效果,同時不會對跟蹤速度有較大的影響。
實驗效果展示
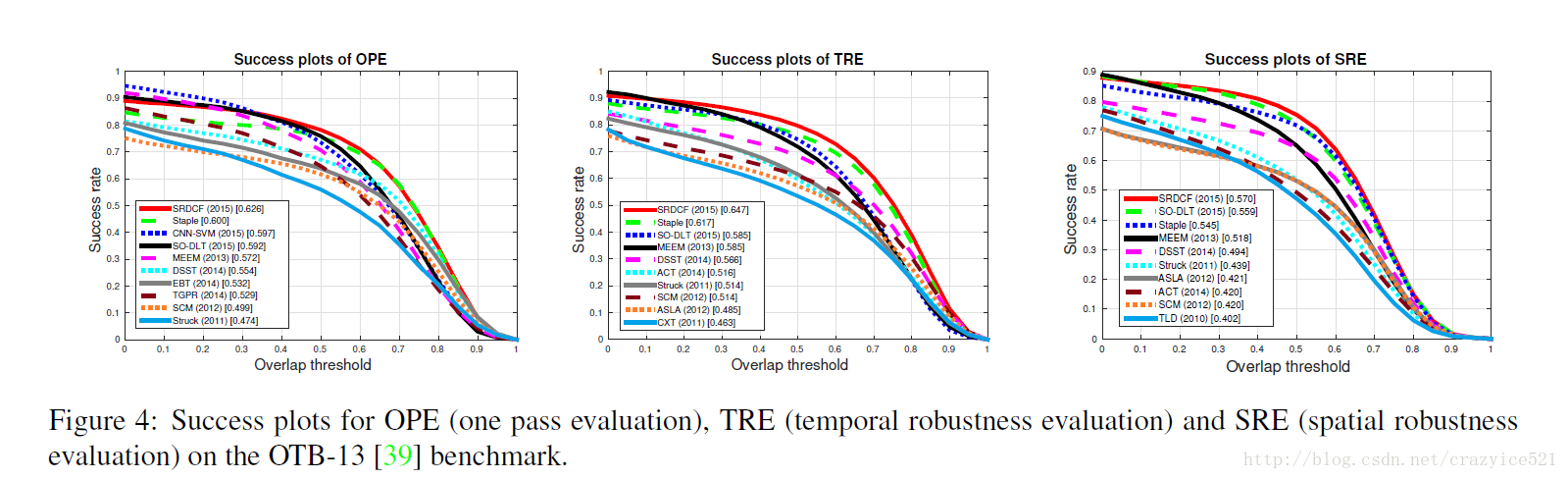
在標準序列集OTB-50上面的跟蹤效果,效果還是很明顯的提升
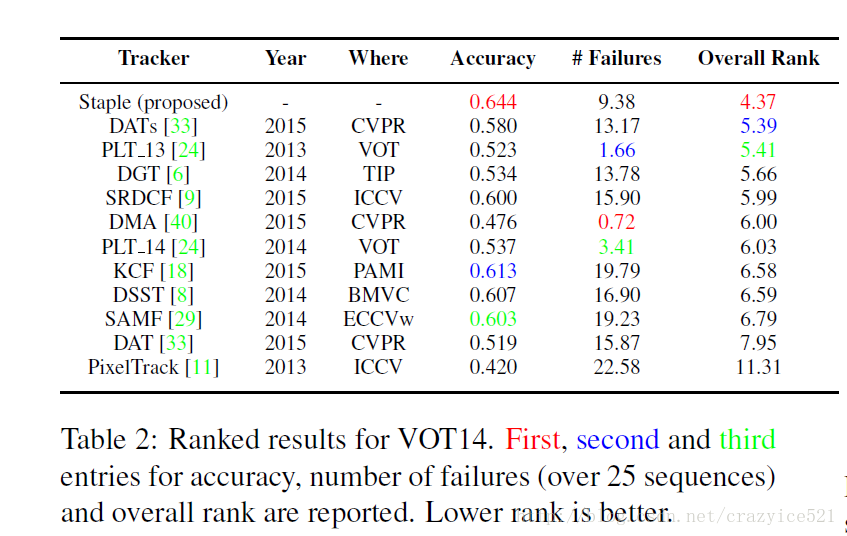
同時和在VOT2014上面表現比較好的幾個跟蹤演算法做了一些比較。在精度上效果是最好的,在失敗數上面排名第二和整體排名上面第三。