ARM核心驅動-字元驅動程式設計模型
一、字元驅動程式設計模型
在linux系統中,裝置的型別非常繁多,比如:字元裝置,塊裝置,網路介面裝置,USB裝置,PCI裝置,平臺裝置,混雜裝置...,而裝置型別不同,也意味著其對應的驅動程式模型不同,這樣就導致了我們需要去掌握眾多的驅動程式模型。那麼能不能從這些眾多的驅動模型中提煉一些具有共性的規則,則是我們能不能學好linux驅動的關鍵。
1、裝置描述結構cdev
在任何一種驅動模型中,裝置都會用核心中的一種結構來描述。我們的字元裝置在核心中使用struct cdev來描述。
1.1、結構定義
struct cdev
{
struct kobject kobj;
struct module *owner;
const struct file_operations *ops; //裝置操作集
struct list_head list;
dev_t dev; //裝置號
unsigned int count; //裝置數
};
1.2、裝置號
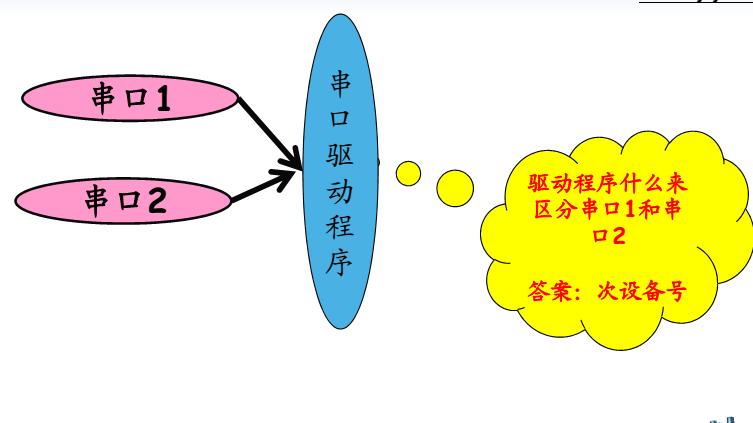
檢視/dev目錄下的裝置號;字元裝置檔案通過主裝置號與字元裝置驅動建立對應關係。
驅動程式通過次裝置號來區分同類型的裝置(主裝置號反映裝置型別)。
裝置號的操作:linux核心中使用dev_t型別來定義裝置號,dev_t這種型別其實質為32位的unsigned int,其中高12位為主裝置號,低20位為次裝置號。
問1:如果知道主裝置號,次裝置號,怎麼組合成dev_t型別
答:dev_t dev = MKDEV(主裝置號, 次裝置號)
問2:如何從dev_t中分解出主裝置號?
答:主裝置號 = MAJOR(dev_t dev)
問3:如何從dev_t中分解出次裝置號?
答:次裝置號 = MINOR(dev_t dev)
如何為裝置分配一個主裝置號?
靜態申請
開發者自己選擇一個數字作為主裝置號,然後通過函式register_chrdev_region向核心申請使用。缺點:如果申請使用的裝置號已經被核心中的其他驅動使用了,則申請失敗。
動態申請
使用alloc_chrdev_region由核心分配一個可用的主裝置號。優點:因為核心知道哪些號已經被使用了,所以不會導致分配到已經被使用的號。
裝置號-登出
不論使用何種方法分配裝置號,都應該在驅動退出時,使用unregister_chrdev_region函式釋放這些裝置號。
1.3、裝置操作集
struct file_operations是一個函式指標的集合,定義能在裝置上進行的操作。結構中的函式指標指向驅動中的函式,這些函式實現一個針對裝置的操作,對於不支援的操作則設定函式指標為NULL。例如:
struct file_operations dev_fops =
{
.llseek = NULL,
.read = dev_read,
.write = dev_write,
.ioctl = dev_ioctl,
.open = dev_open,
.release = dev_release,
};
上面的表就實現了對映,把來自使用者系統呼叫轉換為核心中的函式來完成相關操作,file_operations就是這個對映表。
cdev的分配
cdev變數的定義可以採用靜態和動態兩種辦法
靜態分配
struct cdev mdev;
動態分配
struct cdev *pdev = cdev_alloc();
cdev的初始化
struct cdev的初始化使用cdev_init函式來完成。
cdev_init(struct cdev *cdev, const struct file_operations *fops)
引數:
cdev:待初始化的cdev結構
fops:裝置對應的操作函式集
cdev的註冊
字元裝置的註冊使用cdev_add函式來完成。
cdev_add(struct cdev *p, dev_t dev, unsigned int count)
引數:
p:待新增到核心的字元裝置結構
dev:裝置號(主裝置號、次裝置號)
count:該類裝置的裝置個數
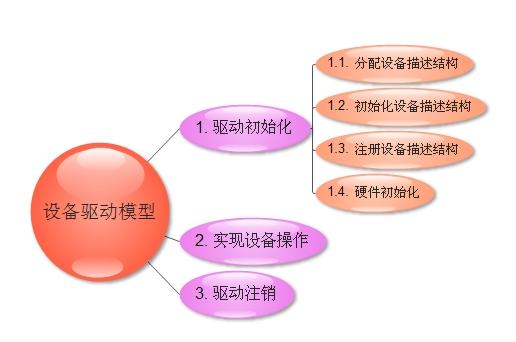
硬體初始化:
根據相應的硬體的晶片手冊,完成初始化。
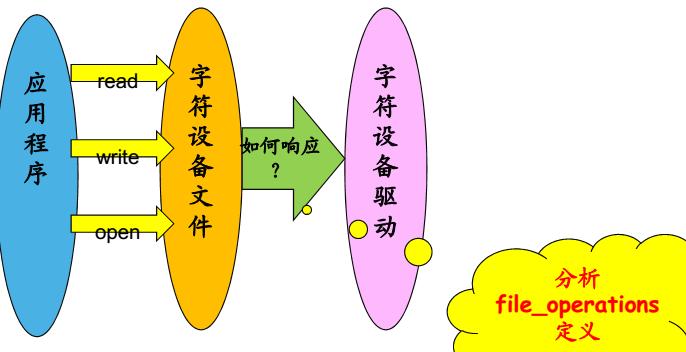
實現裝置操作:
應用程式訪問驅動是通過一個對映關係表,而這張表就是file_operation。它是一個含有函式的指標的結構體
下面是核心中的對映表(file_operation):
struct file_operations
{
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
int (*readdir) (struct file *, void *, filldir_t);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **);
long (*fallocate)(struct file *file, int mode, loff_t offset,loff_t len);
}
裝置方法原型:
1、int (*open)(struct inode *, struct file *)
開啟裝置,響應open系統
2、int (*release)(struct inode *, struct file *)
關閉裝置,響應close系統呼叫
3、loff_t(*llseek)(struct inode *, struct file *)
重定位讀寫指標,響應lseek系統呼叫
4、ssize_t(*read)(struct file *,char _user *, size_t, loff_t *)
從裝置讀取資料,響應read系統呼叫
5、ssize_t(*write)(struct file *, const char _user *, size_t, loff_t *)
向裝置寫入資料,響應write系統呼叫
下面介紹一下裝置方法中常用到的兩個結構體:
struct file
struct inode
1、struct file
在linux系統中,每一個開啟的檔案,在核心中都會關聯一個struct file,它由核心在開啟檔案時建立,在檔案關閉後釋放。
重要成員:
loff_t f_pos 檔案讀寫指標
struct file_operations *f_op 該檔案所對應的操作
2、struct inode
每一個存在於檔案系統裡面的檔案都會關聯一個inode結構,該結構主要用來記錄檔案物理上的資訊。因此,它和代表開啟檔案的file結構是不同的。一個檔案沒有被開啟時不會關聯file結構,但是卻會關聯一個inode結構。
重要成員:
dev_t i_rdev 裝置號
裝置方法:
1、open
open裝置方法是驅動程式用來為以後的操作完成初始化準備工作的。在大部分驅動程式中,open完成如下工作:
標明次裝置號
啟動裝置
2、release
release方法的作用正好與open相反。這個裝置方法有時也稱為close,它是關閉裝置的。
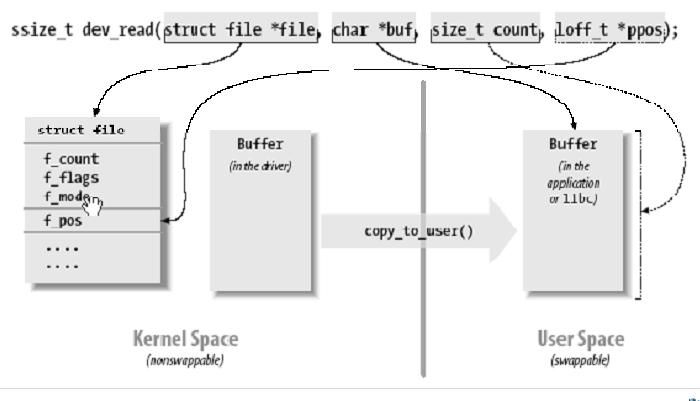
3、read
它通常完成兩件事情:
從裝置中讀取資料(屬於硬體訪問類操作)
將讀取到的資料返回給應用程式
ssize_t (*read)(struct file *filp, char _user *buff, size_t count, loff_t *offp)
引數分析:
filp:與字元裝置檔案關聯的file結構指標,由核心建立
buff:從裝置讀取到的資料,需要儲存到的位置。由read系統呼叫提供該引數。
count:請求傳輸的資料量,由read系統呼叫提供該引數。
offp:檔案的讀寫位置,由核心從file結構中取出後,傳遞進來。
buff引數是來自使用者空間的指標,這類指標都不能被核心程式碼直接引用,必須使用專門的函式
1、int copy_from_user(void *to, const void _user *from, int n)
2、int copy_from_user(void _user *to, const void *from, int n)
4、write
write裝置方法通常完成2件事情:
從應用程式提供的地址中取出資料
將資料寫入裝置(屬於硬體訪問類操作)
ssize_t (* write)(struct file *, const char _user *, size_t, loff_t *)
其引數類似於read
驅動登出:
當我們從核心中解除安裝驅動程式的時候,需要使用cdev_del函式來完成字元裝置的登出。
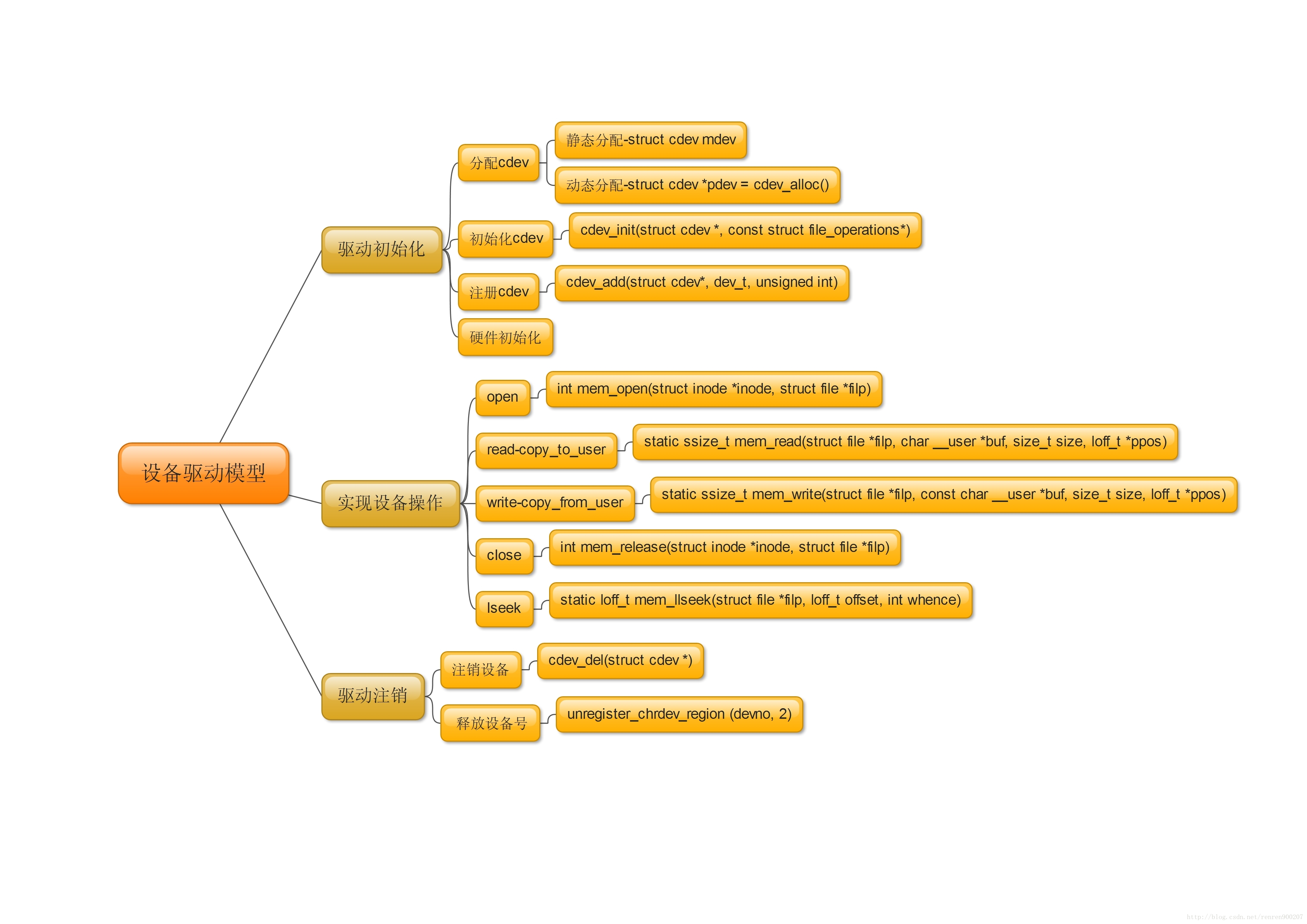
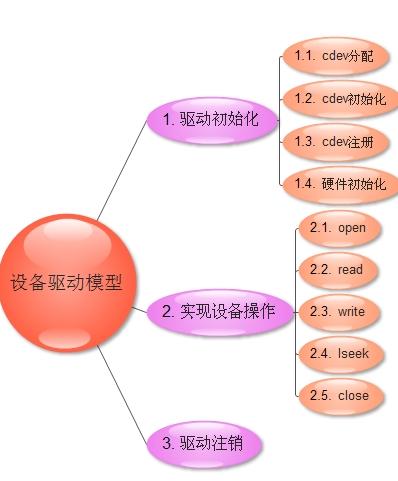
2、字元裝置驅動模型
3、範例驅動分析
#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/slab.h>
int dev1_registers[5];
int dev2_registers[5];
struct cdev cdev;
dev_t devno;
/*檔案開啟函式*/
int mem_open(struct inode *inode, struct file *filp)
{
/*獲取次裝置號*/
int num = MINOR(inode->i_rdev);
if (num==0)
filp->private_data = dev1_registers;
else if(num == 1)
filp->private_data = dev2_registers;
else
return -ENODEV; //無效的次裝置號
return 0;
}
/*檔案釋放函式*/
int mem_release(struct inode *inode, struct file *filp)
{
return 0;
}
/*讀函式*/
static ssize_t mem_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
int *register_addr = filp->private_data; /*獲取裝置的暫存器基地址*/
/*判斷讀位置是否有效*/
if (p >= 5*sizeof(int))
return 0;
if (count > 5*sizeof(int) - p)
count = 5*sizeof(int) - p;
/*讀資料到使用者空間*/
if (copy_to_user(buf, register_addr+p, count))
{
ret = -EFAULT;
}
else
{
*ppos += count;
ret = count;
}
return ret;
}
/*寫函式*/
static ssize_t mem_write(struct file *filp, const char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
int *register_addr = filp->private_data; /*獲取裝置的暫存器地址*/
/*分析和獲取有效的寫長度*/
if (p >= 5*sizeof(int))
return 0;
if (count > 5*sizeof(int) - p)
count = 5*sizeof(int) - p;
/*從使用者空間寫入資料*/
if (copy_from_user(register_addr + p, buf, count))
ret = -EFAULT;
else
{
*ppos += count;
ret = count;
}
return ret;
}
/* seek檔案定位函式 */
static loff_t mem_llseek(struct file *filp, loff_t offset, int whence)
{
loff_t newpos;
switch(whence) {
case SEEK_SET:
newpos = offset;
break;
case SEEK_CUR:
newpos = filp->f_pos + offset;
break;
case SEEK_END:
newpos = 5*sizeof(int)-1 + offset;
break;
default:
return -EINVAL;
}
if ((newpos<0) || (newpos>5*sizeof(int)))
return -EINVAL;
filp->f_pos = newpos;
return newpos;
}
/*檔案操作結構體*/
static const struct file_operations mem_fops =
{
.llseek = mem_llseek,
.read = mem_read,
.write = mem_write,
.open = mem_open,
.release = mem_release,
};
/*裝置驅動模組載入函式*/
static int memdev_init(void)
{
/*初始化cdev結構*/
cdev_init(&cdev, &mem_fops);
/* 註冊字元裝置 */
alloc_chrdev_region(&devno, 0, 2, "memdev");
cdev_add(&cdev, devno, 2);
}
/*模組解除安裝函式*/
static void memdev_exit(void)
{
cdev_del(&cdev); /*登出裝置*/
unregister_chrdev_region(devno, 2); /*釋放裝置號*/
}
MODULE_LICENSE("GPL");
module_init(memdev_init);
module_exit(memdev_exit);