
Kernel 塊裝置驅動框架
1,總體架構:
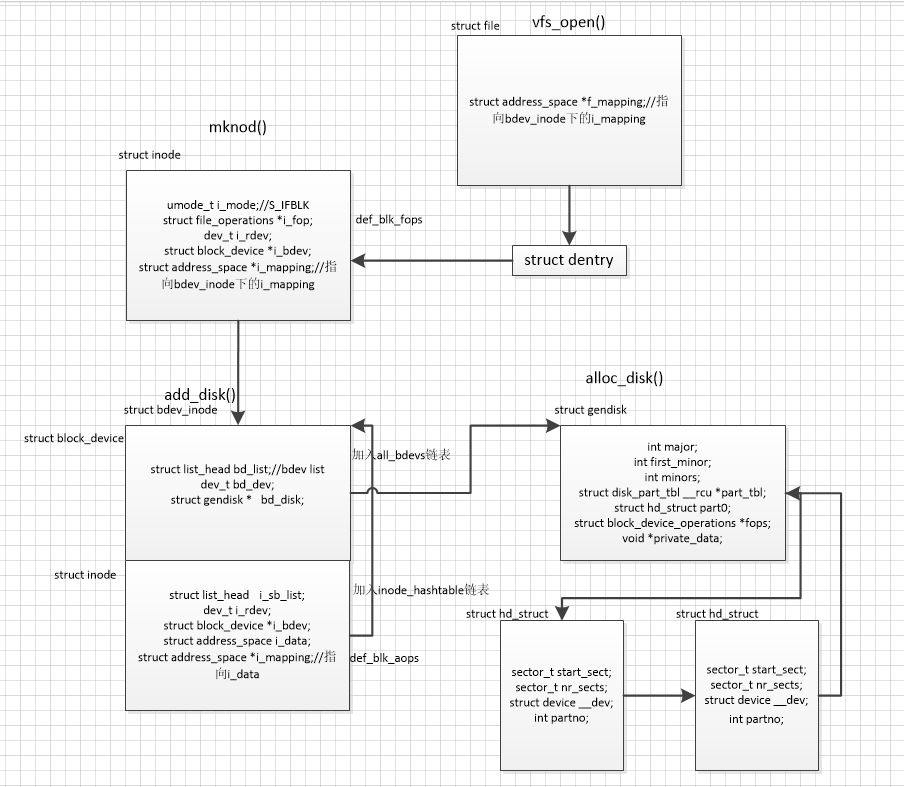
塊裝置驅動框架是Linux裝置最重要的框架之一,涉及核心的vfs,裝置驅動模型等模組,是核心中異常複雜的一個框架。我們先看一下塊裝置設計的主要框架結構,先從總體上對塊裝置有個初步的認識:

2,塊裝置框架分析
1,塊裝置的表示gendisk:
核心使用 struct gendisk 結構例項來表示一個塊裝置。一個塊裝置通常表示一個物理磁碟,每個塊裝置邏輯上可以被分成多個分割槽,每個分割槽用 struct hd_struct 結構表示。
struct gendisk {
/* major, first_minor and minors are input parameters only,
* don't use directly. Use disk_devt() and disk_max_parts().
*/
int major; /* major number of driver */ // 主裝置號
int first_minor; // 起始從裝置號
int minors; /* maximum number of minors, =1 for
* disks that can't be partitioned. */ // 從裝置個數
char disk_name[DISK_NAME_LEN]; /* name of major driver */
char *(*devnode)(struct gendisk *gd, umode_t *mode);
unsigned int events; /* supported events */
unsigned int async_events; /* async events, subset of all */
/* Array of pointers to partitions indexed by partno.
* Protected with matching bdev lock but stat and other
* non-critical accesses use RCU. Always access through
* helpers.
*/
struct disk_part_tbl __rcu *part_tbl; // 分割槽表
struct hd_struct part0; // 整個磁碟分割槽,part_tbl[0]指向part0
const struct block_device_operations *fops; // 塊裝置操作方法
struct request_queue *queue; // 請求佇列(用於請求合併,非同步IO,電梯排程等)
void *private_data; // 裝置特定的資訊
int flags;
struct rw_semaphore lookup_sem;
struct kobject *slave_dir;
struct timer_rand_state *random;
atomic_t sync_io; /* RAID */
struct disk_events *ev;
#ifdef CONFIG_BLK_DEV_INTEGRITY
struct kobject integrity_kobj;
#endif /* CONFIG_BLK_DEV_INTEGRITY */
int node_id;
struct badblocks *bb;
struct lockdep_map lockdep_map;
};
struct hd_struct {
sector_t start_sect; // 起始扇區號
/*
* nr_sects is protected by sequence counter. One might extend a
* partition while IO is happening to it and update of nr_sects
* can be non-atomic on 32bit machines with 64bit sector_t.
*/
sector_t nr_sects; // 扇區個數
seqcount_t nr_sects_seq;
sector_t alignment_offset;
unsigned int discard_alignment;
struct device __dev; // 裝置模型
struct kobject *holder_dir;
int policy, partno; // 分割槽號
struct partition_meta_info *info;
#ifdef CONFIG_FAIL_MAKE_REQUEST
int make_it_fail;
#endif
unsigned long stamp;
atomic_t in_flight[2];
#ifdef CONFIG_SMP
struct disk_stats __percpu *dkstats;
#else
struct disk_stats dkstats;
#endif
struct percpu_ref ref;
struct rcu_head rcu_head;
};
核心提供alloc_disk()介面,實現gendisk和hd_struct的分配和釋放,及初始化。驅動程式需要提供主從裝置號,fops以及裝置特定的private_data。
2,塊裝置的註冊:
驅動程式分配並初始化一個塊裝置之後,通過 add_disk() 介面完成塊裝置的註冊。add_disk()分配一個struct bdev_inode結構,該結構是struct block_device和struct inode的結合體,分別用來鏈入all_bdevs和inode_hashtable連結串列中。其中block_device中的bd_disk用來指向註冊的gendisk。block_device和inode中分別通過bd_dev和i_rdev記錄該gendisk的裝置號。至此,上層可以通過裝置號從all_bdevs或者inode_hashtable連結串列中找到該 bdev_inode結構,然後通過block_device結構的bd_disk找到相應的gendisk,呼叫gendisk的fops操作裝置特定的private_data。
struct bdev_inode {
struct block_device bdev;
struct inode vfs_inode;
};
struct block_device {
dev_t bd_dev; /* not a kdev_t - it's a search key */ // 裝置號
int bd_openers;
struct inode * bd_inode; /* will die */
struct super_block * bd_super;
struct mutex bd_mutex; /* open/close mutex */
void * bd_claiming;
void * bd_holder;
int bd_holders;
bool bd_write_holder;
#ifdef CONFIG_SYSFS
struct list_head bd_holder_disks;
#endif
struct block_device * bd_contains;
unsigned bd_block_size; // 裝置塊大小
u8 bd_partno; // 分割槽號
struct hd_struct * bd_part; // 分割槽結構
/* number of times partitions within this device have been opened. */
unsigned bd_part_count;
int bd_invalidated;
struct gendisk * bd_disk; // 指向的塊裝置
struct request_queue * bd_queue; // 裝置的請求佇列
struct backing_dev_info *bd_bdi;
struct list_head bd_list; // all_devs連結串列節點
/*
* Private data. You must have bd_claim'ed the block_device
* to use this. NOTE: bd_claim allows an owner to claim
* the same device multiple times, the owner must take special
* care to not mess up bd_private for that case.
*/
unsigned long bd_private;
/* The counter of freeze processes */
int bd_fsfreeze_count;
/* Mutex for freeze */
struct mutex bd_fsfreeze_mutex;
} __randomize_layout;
struct inode {
umode_t i_mode;
unsigned short i_opflags;
kuid_t i_uid;
kgid_t i_gid;
unsigned int i_flags;
#ifdef CONFIG_FS_POSIX_ACL
struct posix_acl *i_acl;
struct posix_acl *i_default_acl;
#endif
const struct inode_operations *i_op;
struct super_block *i_sb;
struct address_space *i_mapping; // 指向 i_data,核心初始化i_data結構,並預設初始化i_mapping指向i_data
#ifdef CONFIG_SECURITY
void *i_security;
#endif
/* Stat data, not accessed from path walking */
unsigned long i_ino;
/*
* Filesystems may only read i_nlink directly. They shall use the
* following functions for modification:
*
* (set|clear|inc|drop)_nlink
* inode_(inc|dec)_link_count
*/
union {
const unsigned int i_nlink;
unsigned int __i_nlink;
};
dev_t i_rdev; // 裝置號
loff_t i_size;
struct timespec64 i_atime;
struct timespec64 i_mtime;
struct timespec64 i_ctime;
spinlock_t i_lock; /* i_blocks, i_bytes, maybe i_size */
unsigned short i_bytes;
u8 i_blkbits;
u8 i_write_hint;
blkcnt_t i_blocks;
#ifdef __NEED_I_SIZE_ORDERED
seqcount_t i_size_seqcount;
#endif
/* Misc */
unsigned long i_state;
struct rw_semaphore i_rwsem;
unsigned long dirtied_when; /* jiffies of first dirtying */
unsigned long dirtied_time_when;
struct hlist_node i_hash;
struct list_head i_io_list; /* backing dev IO list */
#ifdef CONFIG_CGROUP_WRITEBACK
struct bdi_writeback *i_wb; /* the associated cgroup wb */
/* foreign inode detection, see wbc_detach_inode() */
int i_wb_frn_winner;
u16 i_wb_frn_avg_time;
u16 i_wb_frn_history;
#endif
struct list_head i_lru; /* inode LRU list */
struct list_head i_sb_list; // inode_hashtable連結串列節點
struct list_head i_wb_list; /* backing dev writeback list */
union {
struct hlist_head i_dentry;
struct rcu_head i_rcu;
};
atomic64_t i_version;
atomic_t i_count;
atomic_t i_dio_count;
atomic_t i_writecount;
#ifdef CONFIG_IMA
atomic_t i_readcount; /* struct files open RO */
#endif
const struct file_operations *i_fop; /* former ->i_op->default_file_ops */
struct file_lock_context *i_flctx;
struct address_space i_data; // 核心初始化 aops 方法集
struct list_head i_devices;
union {
struct pipe_inode_info *i_pipe;
struct block_device *i_bdev; // 指向block_device結構
struct cdev *i_cdev;
char *i_link;
unsigned i_dir_seq;
};
__u32 i_generation;
#ifdef CONFIG_FSNOTIFY
__u32 i_fsnotify_mask; /* all events this inode cares about */
struct fsnotify_mark_connector __rcu *i_fsnotify_marks;
#endif
#if IS_ENABLED(CONFIG_FS_ENCRYPTION)
struct fscrypt_info *i_crypt_info;
#endif
void *i_private; /* fs or device private pointer */
} __randomize_layout;
3,塊裝置節點註冊:
塊裝置gendisk分配,初始化並註冊進核心之後,此時使用者還無法進行訪問,必須通過建立塊裝置節點的方式使得使用者可以訪問該裝置。核心提供類似 ext2_mknod()的方法在檔案系統/dev/下建立一個塊裝置inode,包含該塊裝置的裝置號。這樣,使用者可以通過開啟該塊裝置節點,根據該節點中的裝置號去尋找相應的bdev。
4,塊裝置的開啟和讀寫:
塊裝置的開啟,讀寫遵循linux的vfs框架架構。這裡簡要描述一下塊裝置的開啟在vfs層中的邏輯:使用者呼叫系統呼叫open()開啟一個塊裝置的時候後,kernel呼叫vfs_open(),通過dentry,載入裝置檔案 inode,根據裝置檔案inode的i_mode為S_IFBLK,將裝置檔案inode的i_fop賦值為def_blk_fops,通過呼叫def_blk_fops的open()方法,查詢到註冊進核心的bdev,將裝置inode的i_bdev指向塊裝置的bdev,並將file和裝置inode的i_mapping都指向bdev_inode的i_mapping。
當用戶通過開啟的檔案file去讀寫時,通過標準的vfs操作,呼叫vfs_read()或者vfs_write()。這兩個函式呼叫def_blk_fops的read_iter()和write_iter()方法。這兩個方法內部呼叫file->f_mapping->aops->readpage()或者file->f_mapping->aops->writepage()實現檔案的讀寫。readpage()和writepage()最終呼叫submit_bh()構建request並提交request_queue。
3,塊裝置驅動編寫
從上面塊裝置框架分析可以看出,塊裝置涉及的鏈路非常長,光是嵌入在vfs層中的邏輯就很錯綜複雜,更何況還有裝置的非同步請求佇列的機制等等。好在linux幫助我們實現了健壯而又靈活的框架,使得我們編寫一個塊裝置驅動程式相對容易許多。
(1)首先,由於歷史問題,塊裝置的物理結構被設計成 磁頭,柱面和扇區的組合。核心使用512位元組作為內部扇區大小參與計算等,但硬體可能實現512,1024和2048等作為扇區大小,因此,裝置驅動程式在同核心介面互動時,要注意扇區大小的轉換。
(2)塊裝置驅動程式一般通過alloc_disk()和add_disk()介面分配和註冊。需要手動設定gendisk的fops(用於裝置開啟,關閉和配置ioctl等的方法),及 private_data。
(3)使用核心介面分配並初始化塊裝置的request_queue。如果讀寫操作使用裝置的request_queue,需要提供request_fn方法,以便進行實際的request處理。如果讀寫操作不適用request_queue,可以直接提供make_request_fn方法,這樣讀寫操作在呼叫submit_bh()方法時,立即呼叫自定義的make_request_fn,實現資料的及時讀寫。
示例