
【控制系統數字模擬與CAD】實驗二:結構圖法數字模擬
阿新 • • 發佈:2019-11-12
一. 實驗目的
1. 掌握結構圖法模擬複雜控制系統的方法;
2. 掌握複雜系統聯接矩陣W和輸入聯接矩陣W0的求解過程;
3. 掌握複雜系統的環節連線,矩陣A、 B、 C、D的求解過程;
4. 掌握MATLAB編制結構圖數字模擬的程式,並運用MATLAB程式對模擬結構進行處理。


二、實驗內容
1、實驗要求
上圖系統中,各子系統的初始值均為零,輸入Un*為單位階躍。試編寫模擬程式,求各環節輸出響應(求解閉環狀態方程時,指定採用RK4方法)。記錄模擬結果及程式中計算得到的Ab和Bb。
模擬步長:0.001,模擬時間:1.5s。
2、根據結構圖寫出聯接矩陣
(1)環節連線關係:

即:
其中 為聯接矩陣,
為聯接矩陣, 為輸入聯接矩陣。
為輸入聯接矩陣。 為各環節輸入向量,
為各環節輸入向量, 為各環節輸出向量 。
為各環節輸出向量 。
(2)輸出方程:

其中: 、
、
(3)環節輸入輸出關係:(A+Bs)y(s)=(C+Ds)u(s)
3、系統引數輸入與閉環引數的生成:
(1)輸入輸出關係引數輸入矩陣P:
P=[ 0, tn, kn, kn*tn ;
0, ti, ki, ki*ti ;
1, ts, ks, 0 ;
1, tl, 1/R, 0 ;
0, ce*tm, R, 0 ];
(2)閉環係數陣A, B, C, D的生成:
A=diag( P(:,1) ); B=diag( P(:,2) ); C=diag( P(:,3) ); D=diag( P(:,4) );
(3)系統引數輸入與閉環引數的生成:
連線矩陣輸入方法:建立非零元素矩陣WIJ(m*3型),將非零元素按照i, j, wij次序輸入。其中i為被作用環節號; j為作用環節號; wij為作用關係值; m為非零元素個數(包括W0陣)。

WIJ=[1, 0, 1 ;
1, 5, -Alpha;
2, 1, 1 ;
2, 4, -Beta ;
3, 2, 1 ;
4, 3, 1 ;
4, 5, -ce ;
5, 4, 1 ];
(4)閉環係數陣W, W0的生成:
m=length(WIJ(:,3));
n=5;
W0=zeros(n,1);
W =zeros(n,n);
for k=1:m
if(WIJ(k,2)==0)
W0(WIJ(k,1))=WIJ(k,3);
else
W( WIJ(k,1),WIJ(k,2) ) = WIJ(k,3);
end
end
(5)系統引數輸入與閉環引數的生成:
閉環係數陣Ab, Bb的生成:
Q=B-D*W; Qn=inv(Q); R=C*W-A; V1=C*W0; Ab=Qn*R; Bb=Qn*V1;
(6)數值積分求解
採用RK4演算法求解所得的閉環狀態方程。
三、實驗完整程式碼
clear;
clc;
%******* 初始化引數 ********%
kn=26.7; tn=0.03; ki=0.269; ti=0.067;
ks=76; ts=0.00167;
R=6.58; tl=0.018; tm=0.25; ce=0.131;
Alpha=0.00337; Beta=0.4; Idl=0;
%******* 輸入矩陣 ********%
P=[ 0, tn, kn, kn*tn ;
0, ti, ki, ki*ti ;
1, ts, ks, 0 ;
1, tl, 1/R, 0 ;
0, ce*tm, R, 0 ];
%******* 閉環係數陣 ********%
A=diag( P(:,1) );
B=diag( P(:,2) );
C=diag( P(:,3) );
D=diag( P(:,4) );
WIJ=[1, 0, 1 ;
1, 5, -Alpha;
2, 1, 1 ;
2, 4, -Beta ;
3, 2, 1 ;
4, 3, 1 ;
4, 5, -ce ;
5, 4, 1 ];
%******* 計算W、W0 ********%
m=length(WIJ(:,3));
n=5;
W0=zeros(n,1);
W =zeros(n,n);
for k=1:m
if(WIJ(k,2)==0)
W0(WIJ(k,1))=WIJ(k,3);
else
W( WIJ(k,1),WIJ(k,2) ) = WIJ(k,3);
end
end
%******* 閉環系統陣Ab、Bb生成 ********%
Q=B-D*W; Qn=inv(Q);
R=C*W-A; V1=C*W0;
Ab=Qn*R; Bb=Qn*V1;
h = 0.001;
x = [];
y = [0;0;0;0;0];
y1 = [];
y2 = [];
y3 = [];
y4 = [];
y5 = [];
% ******** 4階龍格-庫塔法 **********%
for i = 0:1:1000
t = i*h; % simulation time: 1s
x(i+1) = t;
k1 = Ab * y + Bb;
k2 = Ab * (y+h*k1/2) + Bb;
k3 = Ab * (y+h*k2/2) + Bb;
k4 = Ab * (y+h*k3) + Bb;
y = y + (k1 + 2*k2 +2*k3 + k4) * h/6;
y1(i+1) = y(1,1);
y2(i+1) = y(2,1);
y3(i+1) = y(3,1);
y4(i+1) = y(4,1);
y5(i+1) = y(5,1);
end
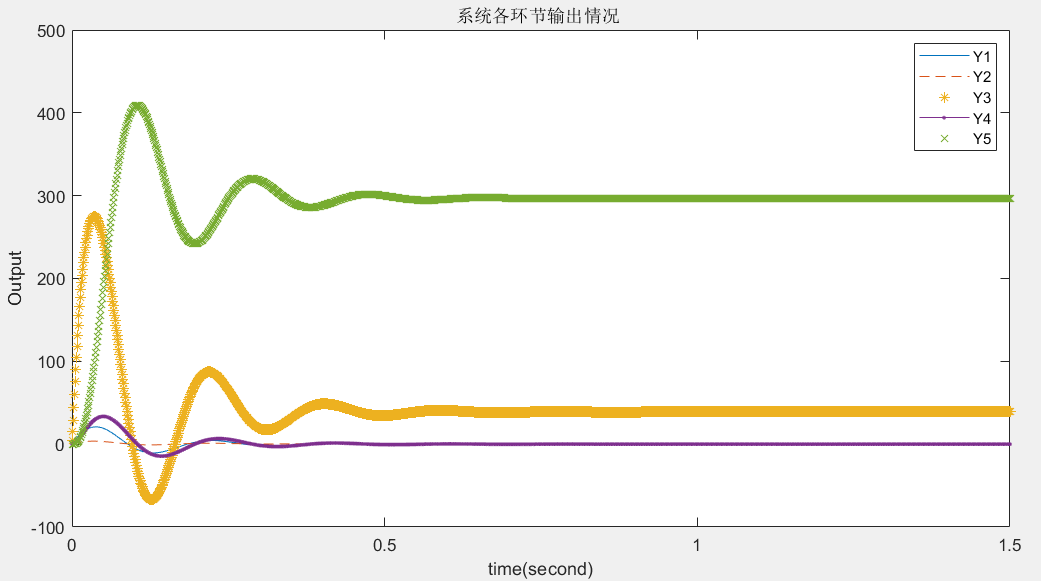
%******* 繪圖 ********%
plot(x, y1, x, y2,'--', x, y3,'*', x, y4,'.-', x, y5,'x');
xlabel(' time /s ');ylabel(' Output ');title('系統輸出情況 ');
legend('Y1','Y2','Y3','Y4','Y5');
四、實驗結果
&n