
[Computer Vision]Harris角點檢測的詳細推導
阿新 • • 發佈:2020-06-12
# Harris角點檢測
## 思想
為什麼要檢測角點呢?因為角點的特徵比較明顯。進行角點檢測的樸素思想是利用影象梯度,也就是根據影象強度的變化來尋找角點。如圖所示
 這裡舉了個例子,給定一個小的區域(Patch),當這個小區域在不同位置滑動的時候,所呈現出來的一些特性是不同的,根據圖示,有三個方面。
- Flat,平的地方,在任何方向,梯度都沒什麼變化。
- Edge,邊的地方,當沿著邊方向的時候,梯度沒什麼變化。
- Corner,角的地方,沿著任何方向,梯度都有變化。
## Error Function
$$
E(u,v)=\sum_{x,y}{w(x,y)[I(x+u,y+v)-I(x,y)]^2}
$$
- $x,y$是相對於一個小patch來說的,例如一個5*5的區域
- $(u,v)$是一個很小的移動量
- $w(x,y)$是windows function,也就是對於每個點的權重,例如想讓中心的點權重高,可以用高斯核,一般就是全1或者高斯。
- $I(x,y)$就代表影象在$(x,y)$的強度值。
- 後面做差其實就是類似求梯度一樣
根據之前的討論,在一個patch裡,如果有角點的存在,各個方向的梯度值都很大,於是乎,我們的目標是讓$E(u,v)$儘可能的大。
因為$(u,v)$的值很小,所以我們可以利用二元函式的泰勒展開,來近似計算。
二元函式的泰勒展開,當然扔掉了一些項。
$$
f(x+u,y+v) \approx f(x,y)+uf_x(x,y)+vf_y(x,y)
$$
那麼我們對Error function中的關鍵部分進行展開
$$
\begin{aligned}
[I(x+u,y+v)-I(x,y)]^2 &\approx [I(x,y)+uI_x+vI_y-I(x,y)]\\
&=(uI_x+vI_y)^2\\
&=[u,v]
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
\begin{bmatrix}
u\\v
\end{bmatrix}
\end{aligned}
$$
所以Error Function可以近似為
$$
E(u,v)\approx [u,v]M\begin{bmatrix}
u\\v
\end{bmatrix}
$$
$$
M=
\sum_{x,y}{w(x,y)
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
}
$$
這就涉及到線性代數裡的二次型問題了。
## 簡單的二次型
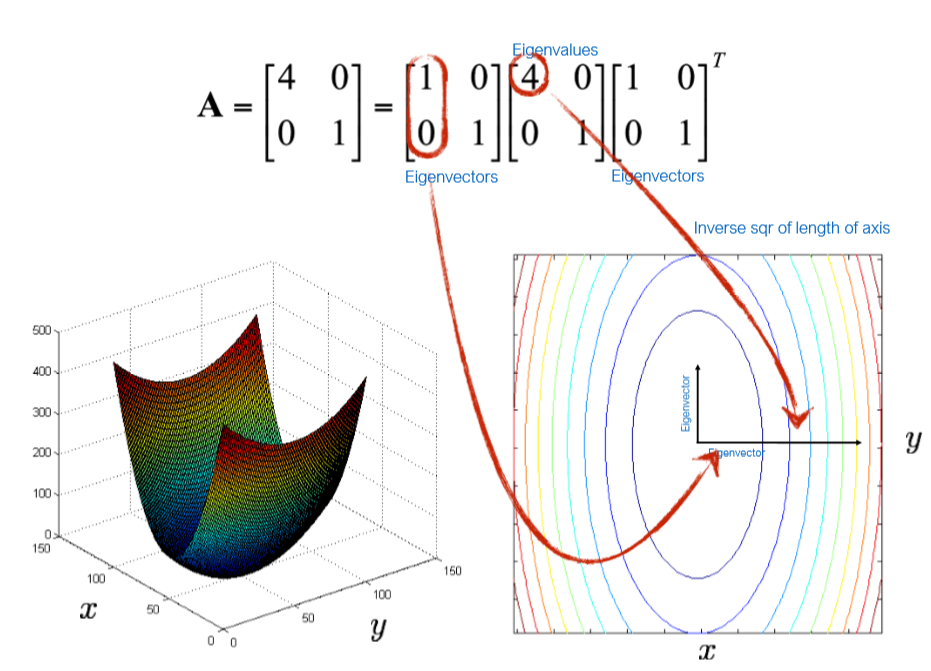
例如 $f(x,y) = x^2+y^2$的可以寫作矩陣的形式
$$
[x,y]\begin{bmatrix}
1 & 0\\
0 & 1
\end{bmatrix}
\begin{bmatrix}
x\\y
\end{bmatrix}
$$
由中間這個矩陣來決定這個二次型的形狀,因為我們研究的二次型只有兩個變數,所以可以視覺化來理解如下圖所示。對形狀矩陣可以進行特徵分解,分為中間的對角陣(對角線都是特徵值)兩邊是特徵向量。特徵向量代表了橢圓切片的長短軸的方向,而特徵值平方根的倒數代表了軸的長短。至於為什麼分解完會和橢圓對應,線性代數書上會有。
這裡舉了個例子,給定一個小的區域(Patch),當這個小區域在不同位置滑動的時候,所呈現出來的一些特性是不同的,根據圖示,有三個方面。
- Flat,平的地方,在任何方向,梯度都沒什麼變化。
- Edge,邊的地方,當沿著邊方向的時候,梯度沒什麼變化。
- Corner,角的地方,沿著任何方向,梯度都有變化。
## Error Function
$$
E(u,v)=\sum_{x,y}{w(x,y)[I(x+u,y+v)-I(x,y)]^2}
$$
- $x,y$是相對於一個小patch來說的,例如一個5*5的區域
- $(u,v)$是一個很小的移動量
- $w(x,y)$是windows function,也就是對於每個點的權重,例如想讓中心的點權重高,可以用高斯核,一般就是全1或者高斯。
- $I(x,y)$就代表影象在$(x,y)$的強度值。
- 後面做差其實就是類似求梯度一樣
根據之前的討論,在一個patch裡,如果有角點的存在,各個方向的梯度值都很大,於是乎,我們的目標是讓$E(u,v)$儘可能的大。
因為$(u,v)$的值很小,所以我們可以利用二元函式的泰勒展開,來近似計算。
二元函式的泰勒展開,當然扔掉了一些項。
$$
f(x+u,y+v) \approx f(x,y)+uf_x(x,y)+vf_y(x,y)
$$
那麼我們對Error function中的關鍵部分進行展開
$$
\begin{aligned}
[I(x+u,y+v)-I(x,y)]^2 &\approx [I(x,y)+uI_x+vI_y-I(x,y)]\\
&=(uI_x+vI_y)^2\\
&=[u,v]
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
\begin{bmatrix}
u\\v
\end{bmatrix}
\end{aligned}
$$
所以Error Function可以近似為
$$
E(u,v)\approx [u,v]M\begin{bmatrix}
u\\v
\end{bmatrix}
$$
$$
M=
\sum_{x,y}{w(x,y)
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
}
$$
這就涉及到線性代數裡的二次型問題了。
## 簡單的二次型
例如 $f(x,y) = x^2+y^2$的可以寫作矩陣的形式
$$
[x,y]\begin{bmatrix}
1 & 0\\
0 & 1
\end{bmatrix}
\begin{bmatrix}
x\\y
\end{bmatrix}
$$
由中間這個矩陣來決定這個二次型的形狀,因為我們研究的二次型只有兩個變數,所以可以視覺化來理解如下圖所示。對形狀矩陣可以進行特徵分解,分為中間的對角陣(對角線都是特徵值)兩邊是特徵向量。特徵向量代表了橢圓切片的長短軸的方向,而特徵值平方根的倒數代表了軸的長短。至於為什麼分解完會和橢圓對應,線性代數書上會有。
 我們可以通過兩個特徵值之間的大小關係,以及他們自身的關係來作為評估的依據。

當兩個特徵值都很大,且差不多時,意味著角點。
## 角點響應的度量
以上分析了,要兩個特徵值都很大,且同時大,那怎麼來度量?於是乎在最原始的論文裡,這樣定義了響應函式,並且對不同的$\lambda$有以下的響應圖
$$
R = det(M)-k(trace(M))^2\\
det(M) = \lambda_1\lambda_2\\
trace(M) = \lambda_1+\lambda_2
$$
$k$一般在是0.04-0.06

如圖所示,黃色的線是等值線,代表$R$的值都相同,左上角是$(0,0)$點,往右下角去$R$的值越大,代表角點的響應越高,圖中畫了個綠線,右側的R值基本可以判斷為是角點了。另外還有一些別的響應函式,基本大同小異吧。
## 演算法
所以現在經過以上的分析,總結一下角點檢測的演算法步驟。
1. 計算整個影象的梯度值$I_x,I_y$
2. 對於每個畫素的$I_{x^2}=I_xI_x,I_{y^2}=I_yI_y,I_{xy}=I_xI_y$
3. 計算每一個畫素視窗的和,意思就是對於一個畫素,定義一個領域例如5\*5,就和之前提及的那樣,然後計算這個鄰域裡面所有第二步計算出來的值的和。$S_{x^2}=G_{\sigma}*I_{x^2},S_{y^2}=G_{\sigma}*I_{y^2},S_{xy}=G_{\sigma}*I_{xy}$
4. 對於每個點$(x,y)$,定義矩陣$\begin{bmatrix}S_{x^2}&S_{xy}\\S_{xy}&S_{y^2}\end{bmatrix}$
5. 對於每個點,計算響應值$R=Det(H)-k(Trace(H))^2$
6. 對$R$設定閾值,並且計算非極大值抑制(nonmax suppression, NMS),這個的意思應該就是比如5\*5的鄰域內有好幾個點通過了閾值的篩選,那麼選擇最大的那個,抑制其他的點。
## 一些特性
- Harris角點響應具有旋轉不變性,因為旋轉不會改變特徵值的大小。
- Harris角點響應對強度變化具有一定的不變性,縮放或者平移。因為經過縮放或者平移,最大值還是最大值,但是閾值可能要改改。
- Harris角點響應不對尺度有不變性,改變尺度可能會改變檢測的結果。可能在某一尺度下檢測出為角點,而另一尺度檢測出為邊緣。
# 參考
- [1]CSE486 PSU http://www.cse.psu.edu/~rtc12/CSE486/
- [2]16-385 CMU 5http://www.cs.cmu.edu
我們可以通過兩個特徵值之間的大小關係,以及他們自身的關係來作為評估的依據。

當兩個特徵值都很大,且差不多時,意味著角點。
## 角點響應的度量
以上分析了,要兩個特徵值都很大,且同時大,那怎麼來度量?於是乎在最原始的論文裡,這樣定義了響應函式,並且對不同的$\lambda$有以下的響應圖
$$
R = det(M)-k(trace(M))^2\\
det(M) = \lambda_1\lambda_2\\
trace(M) = \lambda_1+\lambda_2
$$
$k$一般在是0.04-0.06

如圖所示,黃色的線是等值線,代表$R$的值都相同,左上角是$(0,0)$點,往右下角去$R$的值越大,代表角點的響應越高,圖中畫了個綠線,右側的R值基本可以判斷為是角點了。另外還有一些別的響應函式,基本大同小異吧。
## 演算法
所以現在經過以上的分析,總結一下角點檢測的演算法步驟。
1. 計算整個影象的梯度值$I_x,I_y$
2. 對於每個畫素的$I_{x^2}=I_xI_x,I_{y^2}=I_yI_y,I_{xy}=I_xI_y$
3. 計算每一個畫素視窗的和,意思就是對於一個畫素,定義一個領域例如5\*5,就和之前提及的那樣,然後計算這個鄰域裡面所有第二步計算出來的值的和。$S_{x^2}=G_{\sigma}*I_{x^2},S_{y^2}=G_{\sigma}*I_{y^2},S_{xy}=G_{\sigma}*I_{xy}$
4. 對於每個點$(x,y)$,定義矩陣$\begin{bmatrix}S_{x^2}&S_{xy}\\S_{xy}&S_{y^2}\end{bmatrix}$
5. 對於每個點,計算響應值$R=Det(H)-k(Trace(H))^2$
6. 對$R$設定閾值,並且計算非極大值抑制(nonmax suppression, NMS),這個的意思應該就是比如5\*5的鄰域內有好幾個點通過了閾值的篩選,那麼選擇最大的那個,抑制其他的點。
## 一些特性
- Harris角點響應具有旋轉不變性,因為旋轉不會改變特徵值的大小。
- Harris角點響應對強度變化具有一定的不變性,縮放或者平移。因為經過縮放或者平移,最大值還是最大值,但是閾值可能要改改。
- Harris角點響應不對尺度有不變性,改變尺度可能會改變檢測的結果。可能在某一尺度下檢測出為角點,而另一尺度檢測出為邊緣。
# 參考
- [1]CSE486 PSU http://www.cse.psu.edu/~rtc12/CSE486/
- [2]16-385 CMU 5http://www.cs.cmu.edu
這裡舉了個例子,給定一個小的區域(Patch),當這個小區域在不同位置滑動的時候,所呈現出來的一些特性是不同的,根據圖示,有三個方面。
- Flat,平的地方,在任何方向,梯度都沒什麼變化。
- Edge,邊的地方,當沿著邊方向的時候,梯度沒什麼變化。
- Corner,角的地方,沿著任何方向,梯度都有變化。
## Error Function
$$
E(u,v)=\sum_{x,y}{w(x,y)[I(x+u,y+v)-I(x,y)]^2}
$$
- $x,y$是相對於一個小patch來說的,例如一個5*5的區域
- $(u,v)$是一個很小的移動量
- $w(x,y)$是windows function,也就是對於每個點的權重,例如想讓中心的點權重高,可以用高斯核,一般就是全1或者高斯。
- $I(x,y)$就代表影象在$(x,y)$的強度值。
- 後面做差其實就是類似求梯度一樣
根據之前的討論,在一個patch裡,如果有角點的存在,各個方向的梯度值都很大,於是乎,我們的目標是讓$E(u,v)$儘可能的大。
因為$(u,v)$的值很小,所以我們可以利用二元函式的泰勒展開,來近似計算。
二元函式的泰勒展開,當然扔掉了一些項。
$$
f(x+u,y+v) \approx f(x,y)+uf_x(x,y)+vf_y(x,y)
$$
那麼我們對Error function中的關鍵部分進行展開
$$
\begin{aligned}
[I(x+u,y+v)-I(x,y)]^2 &\approx [I(x,y)+uI_x+vI_y-I(x,y)]\\
&=(uI_x+vI_y)^2\\
&=[u,v]
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
\begin{bmatrix}
u\\v
\end{bmatrix}
\end{aligned}
$$
所以Error Function可以近似為
$$
E(u,v)\approx [u,v]M\begin{bmatrix}
u\\v
\end{bmatrix}
$$
$$
M=
\sum_{x,y}{w(x,y)
\begin{bmatrix}
I_x^2 &I_xI_y\\
I_xI_y&I_y^2
\end{bmatrix}
}
$$
這就涉及到線性代數裡的二次型問題了。
## 簡單的二次型
例如 $f(x,y) = x^2+y^2$的可以寫作矩陣的形式
$$
[x,y]\begin{bmatrix}
1 & 0\\
0 & 1
\end{bmatrix}
\begin{bmatrix}
x\\y
\end{bmatrix}
$$
由中間這個矩陣來決定這個二次型的形狀,因為我們研究的二次型只有兩個變數,所以可以視覺化來理解如下圖所示。對形狀矩陣可以進行特徵分解,分為中間的對角陣(對角線都是特徵值)兩邊是特徵向量。特徵向量代表了橢圓切片的長短軸的方向,而特徵值平方根的倒數代表了軸的長短。至於為什麼分解完會和橢圓對應,線性代數書上會有。
我們可以通過兩個特徵值之間的大小關係,以及他們自身的關係來作為評估的依據。

當兩個特徵值都很大,且差不多時,意味著角點。
## 角點響應的度量
以上分析了,要兩個特徵值都很大,且同時大,那怎麼來度量?於是乎在最原始的論文裡,這樣定義了響應函式,並且對不同的$\lambda$有以下的響應圖
$$
R = det(M)-k(trace(M))^2\\
det(M) = \lambda_1\lambda_2\\
trace(M) = \lambda_1+\lambda_2
$$
$k$一般在是0.04-0.06

如圖所示,黃色的線是等值線,代表$R$的值都相同,左上角是$(0,0)$點,往右下角去$R$的值越大,代表角點的響應越高,圖中畫了個綠線,右側的R值基本可以判斷為是角點了。另外還有一些別的響應函式,基本大同小異吧。
## 演算法
所以現在經過以上的分析,總結一下角點檢測的演算法步驟。
1. 計算整個影象的梯度值$I_x,I_y$
2. 對於每個畫素的$I_{x^2}=I_xI_x,I_{y^2}=I_yI_y,I_{xy}=I_xI_y$
3. 計算每一個畫素視窗的和,意思就是對於一個畫素,定義一個領域例如5\*5,就和之前提及的那樣,然後計算這個鄰域裡面所有第二步計算出來的值的和。$S_{x^2}=G_{\sigma}*I_{x^2},S_{y^2}=G_{\sigma}*I_{y^2},S_{xy}=G_{\sigma}*I_{xy}$
4. 對於每個點$(x,y)$,定義矩陣$\begin{bmatrix}S_{x^2}&S_{xy}\\S_{xy}&S_{y^2}\end{bmatrix}$
5. 對於每個點,計算響應值$R=Det(H)-k(Trace(H))^2$
6. 對$R$設定閾值,並且計算非極大值抑制(nonmax suppression, NMS),這個的意思應該就是比如5\*5的鄰域內有好幾個點通過了閾值的篩選,那麼選擇最大的那個,抑制其他的點。
## 一些特性
- Harris角點響應具有旋轉不變性,因為旋轉不會改變特徵值的大小。
- Harris角點響應對強度變化具有一定的不變性,縮放或者平移。因為經過縮放或者平移,最大值還是最大值,但是閾值可能要改改。
- Harris角點響應不對尺度有不變性,改變尺度可能會改變檢測的結果。可能在某一尺度下檢測出為角點,而另一尺度檢測出為邊緣。
# 參考
- [1]CSE486 PSU http://www.cse.psu.edu/~rtc12/CSE486/
- [2]16-385 CMU 5http://www.cs.cmu.edu