
準!武漢大學和高德組隊 拿下國際頂賽“車載環境下的手機定位”組別冠軍
阿新 • • 發佈:2020-12-24
如何擁有更精準的手機導航體驗?現在人們越來越習慣在出門的時候用手機導航路線。體驗比起前些年更快更準,除了手機硬體效能的提升以外,一整套技術方案起到了關鍵作用,而其中定位又是最基本的基礎技術。這也是高德技術團隊研究的重要領域。
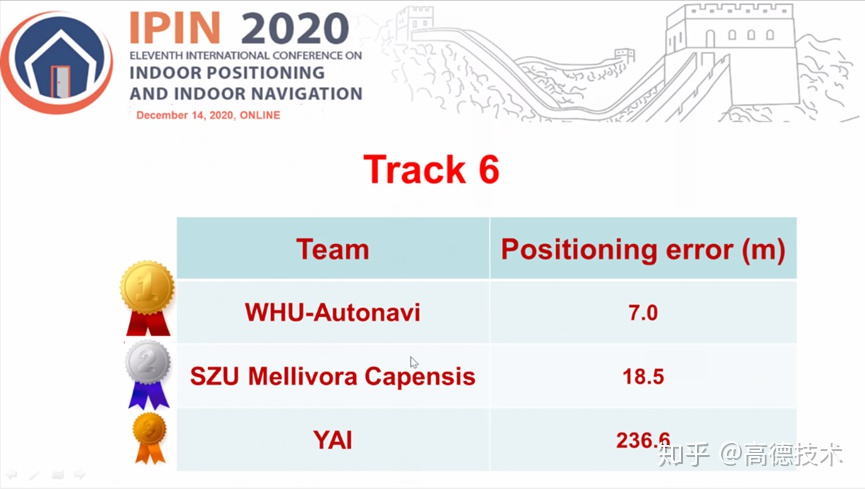 在剛結束的定位領域國際頂會IPIN2020比賽中,武漢大學和高德智慧技術中心定位研發部聯合組隊參與了Track 6 組別比賽。該項競賽目的在於挖掘基於智慧手機內建感測器(包括GNSS,陀螺儀,加速度計和磁力計)的車輛組合導航定位方案的潛力,測試路徑包括室外開闊場景、部分遮擋場景以及室內衛星訊號遮擋場景。最終,武漢大學與高德聯隊以絕對優勢奪得了冠軍。
國際室內定位導航大會IPIN(Indoor Positioning and Indoor Navigation)始創於2010年,是目前室內定位領域全球最大的國際學術會議,伴隨大會同期舉辦的比賽是全球三大室內定位賽事之一,其餘兩大賽事的舉辦方分別為美國國家標準與技術研究院(NIST)和微軟公司,IPIN大會在谷歌學術排名中屬於頂尖級別定位與導航會議。
(https://scholar.google.com.au/citations?view_op=top_venues&hl=en&vq=eng_radarpositioningnavigation)
結合真實場景增強難度 考驗演算法慣導推算能力
隨著智慧手機的全面普及,使用手機進行定位導航的使用者量巨大,而使用手機定位面臨很多挑戰,主要依賴於GPS定位,由於GPS訊號容易受到非視距、多徑的干擾,常發生丟星、漂移等問題,尤其是室內場景(隧道、停車場等)。
目前車載定位導航系統普遍採用感測器與GPS融合的定位方式保持定位的穩定與連續。而手機端的元器件受成本限制,往往精度有限,很難滿足車載導航定位的最低要求。因此,在今年的IPIN比賽中,首次加入了車載環境下的手機定位專案。
比賽採用事後處理(off-site)的方式,舉辦方提供駕車導航途中的手機資料(包括GPS、加速度、陀螺儀、磁力計、氣壓等),參賽者根據手機資料還原車輛行駛的實際位置。
全場約19公里,手機固定安裝在車上,前4.5公里用於參賽團隊演算法初始化,後14.35公里用於演算法驗證,驗證階段會有幾段時間長短不一的GPS訊號缺失(總共23分鐘),以及11分鐘室內區域。其中在初始化階段,主要用於感測器矯正、狀態初始化以及估計安裝角,初始化軌跡包括多個轉彎、停車等動作。在驗證階段會採取人為遮蔽GPS訊號(模擬GPS無法定位)和室內駕車(還原真實的GPS無法定位情況)。
比賽中單次GPS訊號中斷時間很長,在驗證階段,共有19次GPS訊號中斷,其中,最長的一次中斷時長有400多秒,GPS長時無法定位情況下,很考驗演算法慣導推算的能力,包括感測器零偏估計的精度、狀態估計的誤差大小等。在GPS訊號中斷期間,沒有其它提供絕對位置、速度的訊號(WIFI、基站、藍芽、里程計等)。因此,一旦演算法出現較大偏差,會持續影響之後的定位。軌跡最後兩段長時間GPS中斷帶來的挑戰最大,其中一段是在開闊的機場內隨意行駛,無法使用路網匹配技術。單獨依靠感測器慣導推算還原真實位置難度巨大。
最後,武漢大學和高德聯合團隊藉助大資料探勘以及人工神經網路的幫助,採用相對較新的VDR核心技術,結合車輛特殊的運動模式設計模型和方程,降低標定偏差,有效避開了硬體效能不足的缺陷,充分利用資料後處理優勢進一步提升軌跡位置精度的思路解題並奪得了冠軍。
強強聯合攻關技術難點 提升導航使用者體驗
DR(Dead Reckoning)是導航定位中的一項重要技術,該技術通過融合慣性測量單元(IMU)、車速等多元資訊,實現在GNSS訊號丟失情況下的連續位置推算。高德在車機DR領域的技術積累開始的比較早,在業界處於領先地位,目前已經在上百款車型上落地應用,保證了在城市峽谷、隧道、停車場等複雜場景下的連續準確導航。
近些年來,高德定位研發團隊一直致力於結合手機感測器和大資料技術,使用機器學習等智慧技術解決導航場景的疑難雜題。例如高架上下、主輔路識別等場景,在這些地方僅使用GPS難以進行有效的位置區分和精準的導航,長期以來都是手機導航定位的痛點。高德創新的通過對出行大資料的挖掘,提取經VDR技術獲取的手機姿態變化資訊作為關鍵特徵,結合GPS資訊、衛星SNR資訊等特徵,對區域性路段進行表徵學習,有效的解決了上述難題。相關功能均已在高德地圖上線。
相比於車機DR,手機DR面臨更大的挑戰。首先,在駕車導航定位途中,手機擺放姿態、位置往往不固定,對於判定手機是否固定支架、估計手機擺放姿態就顯得尤為重要。其次,手機沒有里程計,在GPS無法定位時,很難準確估計車輛實際行駛速度,導致VDR推算位置容易發散。最後,智慧手機種類繁多,手機感測器的差異巨大,如何保障不同手機的定位準確、可靠也是需要考慮的重要問題。
為了提高複雜環境下的手機定位精度,從而提升高德使用者出行體驗。高德和武漢大學正在聯合攻關手機航位推算關鍵技術(VDR)並已取得了不少創新突破,相信不久的將來會有更多的好訊息傳出來。
在剛結束的定位領域國際頂會IPIN2020比賽中,武漢大學和高德智慧技術中心定位研發部聯合組隊參與了Track 6 組別比賽。該項競賽目的在於挖掘基於智慧手機內建感測器(包括GNSS,陀螺儀,加速度計和磁力計)的車輛組合導航定位方案的潛力,測試路徑包括室外開闊場景、部分遮擋場景以及室內衛星訊號遮擋場景。最終,武漢大學與高德聯隊以絕對優勢奪得了冠軍。
國際室內定位導航大會IPIN(Indoor Positioning and Indoor Navigation)始創於2010年,是目前室內定位領域全球最大的國際學術會議,伴隨大會同期舉辦的比賽是全球三大室內定位賽事之一,其餘兩大賽事的舉辦方分別為美國國家標準與技術研究院(NIST)和微軟公司,IPIN大會在谷歌學術排名中屬於頂尖級別定位與導航會議。
(https://scholar.google.com.au/citations?view_op=top_venues&hl=en&vq=eng_radarpositioningnavigation)
結合真實場景增強難度 考驗演算法慣導推算能力
隨著智慧手機的全面普及,使用手機進行定位導航的使用者量巨大,而使用手機定位面臨很多挑戰,主要依賴於GPS定位,由於GPS訊號容易受到非視距、多徑的干擾,常發生丟星、漂移等問題,尤其是室內場景(隧道、停車場等)。
目前車載定位導航系統普遍採用感測器與GPS融合的定位方式保持定位的穩定與連續。而手機端的元器件受成本限制,往往精度有限,很難滿足車載導航定位的最低要求。因此,在今年的IPIN比賽中,首次加入了車載環境下的手機定位專案。
比賽採用事後處理(off-site)的方式,舉辦方提供駕車導航途中的手機資料(包括GPS、加速度、陀螺儀、磁力計、氣壓等),參賽者根據手機資料還原車輛行駛的實際位置。
全場約19公里,手機固定安裝在車上,前4.5公里用於參賽團隊演算法初始化,後14.35公里用於演算法驗證,驗證階段會有幾段時間長短不一的GPS訊號缺失(總共23分鐘),以及11分鐘室內區域。其中在初始化階段,主要用於感測器矯正、狀態初始化以及估計安裝角,初始化軌跡包括多個轉彎、停車等動作。在驗證階段會採取人為遮蔽GPS訊號(模擬GPS無法定位)和室內駕車(還原真實的GPS無法定位情況)。
比賽中單次GPS訊號中斷時間很長,在驗證階段,共有19次GPS訊號中斷,其中,最長的一次中斷時長有400多秒,GPS長時無法定位情況下,很考驗演算法慣導推算的能力,包括感測器零偏估計的精度、狀態估計的誤差大小等。在GPS訊號中斷期間,沒有其它提供絕對位置、速度的訊號(WIFI、基站、藍芽、里程計等)。因此,一旦演算法出現較大偏差,會持續影響之後的定位。軌跡最後兩段長時間GPS中斷帶來的挑戰最大,其中一段是在開闊的機場內隨意行駛,無法使用路網匹配技術。單獨依靠感測器慣導推算還原真實位置難度巨大。
最後,武漢大學和高德聯合團隊藉助大資料探勘以及人工神經網路的幫助,採用相對較新的VDR核心技術,結合車輛特殊的運動模式設計模型和方程,降低標定偏差,有效避開了硬體效能不足的缺陷,充分利用資料後處理優勢進一步提升軌跡位置精度的思路解題並奪得了冠軍。
強強聯合攻關技術難點 提升導航使用者體驗
DR(Dead Reckoning)是導航定位中的一項重要技術,該技術通過融合慣性測量單元(IMU)、車速等多元資訊,實現在GNSS訊號丟失情況下的連續位置推算。高德在車機DR領域的技術積累開始的比較早,在業界處於領先地位,目前已經在上百款車型上落地應用,保證了在城市峽谷、隧道、停車場等複雜場景下的連續準確導航。
近些年來,高德定位研發團隊一直致力於結合手機感測器和大資料技術,使用機器學習等智慧技術解決導航場景的疑難雜題。例如高架上下、主輔路識別等場景,在這些地方僅使用GPS難以進行有效的位置區分和精準的導航,長期以來都是手機導航定位的痛點。高德創新的通過對出行大資料的挖掘,提取經VDR技術獲取的手機姿態變化資訊作為關鍵特徵,結合GPS資訊、衛星SNR資訊等特徵,對區域性路段進行表徵學習,有效的解決了上述難題。相關功能均已在高德地圖上線。
相比於車機DR,手機DR面臨更大的挑戰。首先,在駕車導航定位途中,手機擺放姿態、位置往往不固定,對於判定手機是否固定支架、估計手機擺放姿態就顯得尤為重要。其次,手機沒有里程計,在GPS無法定位時,很難準確估計車輛實際行駛速度,導致VDR推算位置容易發散。最後,智慧手機種類繁多,手機感測器的差異巨大,如何保障不同手機的定位準確、可靠也是需要考慮的重要問題。
為了提高複雜環境下的手機定位精度,從而提升高德使用者出行體驗。高德和武漢大學正在聯合攻關手機航位推算關鍵技術(VDR)並已取得了不少創新突破,相信不久的將來會有更多的好訊息傳出來。

在剛結束的定位領域國際頂會IPIN2020比賽中,武漢大學和高德智慧技術中心定位研發部聯合組隊參與了Track 6 組別比賽。該項競賽目的在於挖掘基於智慧手機內建感測器(包括GNSS,陀螺儀,加速度計和磁力計)的車輛組合導航定位方案的潛力,測試路徑包括室外開闊場景、部分遮擋場景以及室內衛星訊號遮擋場景。最終,武漢大學與高德聯隊以絕對優勢奪得了冠軍。
國際室內定位導航大會IPIN(Indoor Positioning and Indoor Navigation)始創於2010年,是目前室內定位領域全球最大的國際學術會議,伴隨大會同期舉辦的比賽是全球三大室內定位賽事之一,其餘兩大賽事的舉辦方分別為美國國家標準與技術研究院(NIST)和微軟公司,IPIN大會在谷歌學術排名中屬於頂尖級別定位與導航會議。
(https://scholar.google.com.au/citations?view_op=top_venues&hl=en&vq=eng_radarpositioningnavigation)
結合真實場景增強難度 考驗演算法慣導推算能力
隨著智慧手機的全面普及,使用手機進行定位導航的使用者量巨大,而使用手機定位面臨很多挑戰,主要依賴於GPS定位,由於GPS訊號容易受到非視距、多徑的干擾,常發生丟星、漂移等問題,尤其是室內場景(隧道、停車場等)。
目前車載定位導航系統普遍採用感測器與GPS融合的定位方式保持定位的穩定與連續。而手機端的元器件受成本限制,往往精度有限,很難滿足車載導航定位的最低要求。因此,在今年的IPIN比賽中,首次加入了車載環境下的手機定位專案。
比賽採用事後處理(off-site)的方式,舉辦方提供駕車導航途中的手機資料(包括GPS、加速度、陀螺儀、磁力計、氣壓等),參賽者根據手機資料還原車輛行駛的實際位置。
全場約19公里,手機固定安裝在車上,前4.5公里用於參賽團隊演算法初始化,後14.35公里用於演算法驗證,驗證階段會有幾段時間長短不一的GPS訊號缺失(總共23分鐘),以及11分鐘室內區域。其中在初始化階段,主要用於感測器矯正、狀態初始化以及估計安裝角,初始化軌跡包括多個轉彎、停車等動作。在驗證階段會採取人為遮蔽GPS訊號(模擬GPS無法定位)和室內駕車(還原真實的GPS無法定位情況)。
比賽中單次GPS訊號中斷時間很長,在驗證階段,共有19次GPS訊號中斷,其中,最長的一次中斷時長有400多秒,GPS長時無法定位情況下,很考驗演算法慣導推算的能力,包括感測器零偏估計的精度、狀態估計的誤差大小等。在GPS訊號中斷期間,沒有其它提供絕對位置、速度的訊號(WIFI、基站、藍芽、里程計等)。因此,一旦演算法出現較大偏差,會持續影響之後的定位。軌跡最後兩段長時間GPS中斷帶來的挑戰最大,其中一段是在開闊的機場內隨意行駛,無法使用路網匹配技術。單獨依靠感測器慣導推算還原真實位置難度巨大。
最後,武漢大學和高德聯合團隊藉助大資料探勘以及人工神經網路的幫助,採用相對較新的VDR核心技術,結合車輛特殊的運動模式設計模型和方程,降低標定偏差,有效避開了硬體效能不足的缺陷,充分利用資料後處理優勢進一步提升軌跡位置精度的思路解題並奪得了冠軍。
強強聯合攻關技術難點 提升導航使用者體驗
DR(Dead Reckoning)是導航定位中的一項重要技術,該技術通過融合慣性測量單元(IMU)、車速等多元資訊,實現在GNSS訊號丟失情況下的連續位置推算。高德在車機DR領域的技術積累開始的比較早,在業界處於領先地位,目前已經在上百款車型上落地應用,保證了在城市峽谷、隧道、停車場等複雜場景下的連續準確導航。
近些年來,高德定位研發團隊一直致力於結合手機感測器和大資料技術,使用機器學習等智慧技術解決導航場景的疑難雜題。例如高架上下、主輔路識別等場景,在這些地方僅使用GPS難以進行有效的位置區分和精準的導航,長期以來都是手機導航定位的痛點。高德創新的通過對出行大資料的挖掘,提取經VDR技術獲取的手機姿態變化資訊作為關鍵特徵,結合GPS資訊、衛星SNR資訊等特徵,對區域性路段進行表徵學習,有效的解決了上述難題。相關功能均已在高德地圖上線。
相比於車機DR,手機DR面臨更大的挑戰。首先,在駕車導航定位途中,手機擺放姿態、位置往往不固定,對於判定手機是否固定支架、估計手機擺放姿態就顯得尤為重要。其次,手機沒有里程計,在GPS無法定位時,很難準確估計車輛實際行駛速度,導致VDR推算位置容易發散。最後,智慧手機種類繁多,手機感測器的差異巨大,如何保障不同手機的定位準確、可靠也是需要考慮的重要問題。
為了提高複雜環境下的手機定位精度,從而提升高德使用者出行體驗。高德和武漢大學正在聯合攻關手機航位推算關鍵技術(VDR)並已取得了不少創新突破,相信不久的將來會有更多的好訊息傳出來。