
go中sync.Mutex原始碼解讀
阿新 • • 發佈:2021-03-15
- [互斥鎖](#%E4%BA%92%E6%96%A5%E9%94%81)
- [前言](#%E5%89%8D%E8%A8%80)
- [什麼是sync.Mutex](#%E4%BB%80%E4%B9%88%E6%98%AFsyncmutex)
- [分析下原始碼](#%E5%88%86%E6%9E%90%E4%B8%8B%E6%BA%90%E7%A0%81)
- [Lock](#lock)
- [位運算](#%E4%BD%8D%E8%BF%90%E7%AE%97)
- [Unlock](#unlock)
- [總結](#%E6%80%BB%E7%BB%93)
- [參考](#%E5%8F%82%E8%80%83)
## 互斥鎖
### 前言
本次的程式碼是基於`go version go1.13.15 darwin/amd64`
### 什麼是sync.Mutex
`sync.Mutex`是Go標準庫中常用的一個排外鎖。當一個`goroutine`獲得了這個鎖的擁有權後, 其它請求鎖的`goroutine`就會阻塞在`Lock`方法的呼叫上,直到鎖被釋放。
```go
var (
mu sync.Mutex
balance int
)
func main() {
Deposit(1)
fmt.Println(Balance())
}
func Deposit(amount int) {
mu.Lock()
balance = balance + amount
mu.Unlock()
}
func Balance() int {
mu.Lock()
b := balance
mu.Unlock()
return b
}
```
使用起來很簡單,對需要鎖定的資源,前面加`Lock()`鎖定,完成的時候加`Unlock()`解鎖就好了。
### 分析下原始碼
```go
const (
// mutex is locked
// 是否加鎖的標識
mutexLocked = 1 << iota
mutexWoken
mutexStarving
mutexWaiterShift = iota
// 公平鎖
//
// 鎖有兩種模式:正常模式和飢餓模式。
// 在正常模式下,所有的等待鎖的goroutine都會存在一個先進先出的佇列中(輪流被喚醒)
// 但是一個被喚醒的goroutine並不是直接獲得鎖,而是仍然需要和那些新請求鎖的(new arrivial)
// 的goroutine競爭,而這其實是不公平的,因為新請求鎖的goroutine有一個優勢——它們正在CPU上
// 執行,並且數量可能會很多。所以一個被喚醒的goroutine拿到鎖的概率是很小的。在這種情況下,
// 這個被喚醒的goroutine會加入到佇列的頭部。如果一個等待的goroutine有超過1ms(寫死在程式碼中)
// 都沒獲取到鎖,那麼就會把鎖轉變為飢餓模式。
//
// 在飢餓模式中,鎖的所有權會直接從釋放鎖(unlock)的goroutine轉交給佇列頭的goroutine,
// 新請求鎖的goroutine就算鎖是空閒狀態也不會去獲取鎖,並且也不會嘗試自旋。它們只是排到佇列的尾部。
//
// 如果一個goroutine獲取到了鎖之後,它會判斷以下兩種情況:
// 1. 它是佇列中最後一個goroutine;
// 2. 它拿到鎖所花的時間小於1ms;
// 以上只要有一個成立,它就會把鎖轉變回正常模式。
// 正常模式會有比較好的效能,因為即使有很多阻塞的等待鎖的goroutine,
// 一個goroutine也可以嘗試請求多次鎖。
// 飢餓模式對於防止尾部延遲來說非常的重要。
starvationThresholdNs = 1e6
)
// A Mutex is a mutual exclusion lock.
// The zero value for a Mutex is an unlocked mutex.
//
// A Mutex must not be copied after first use.
type Mutex struct {
// mutex鎖當前的狀態
state int32
// 訊號量,用於喚醒goroutine
sema uint32
}
```
重點開看下`state`的幾種狀態:
大神寫程式碼的思路就是驚奇,這裡`state`又運用到了位移的操作
- mutexLocked 對應右邊低位第一個bit 1 代表鎖被佔用 0代表鎖空閒
- mutexWoken 對應右邊低位第二個bit 1 表示已喚醒 0表示未喚醒
- mutexStarving 對應右邊低位第三個bit 1 代表鎖處於飢餓模式 0代表鎖處於正常模式
- mutexWaiterShift 值為3,根據 `mutex.state > 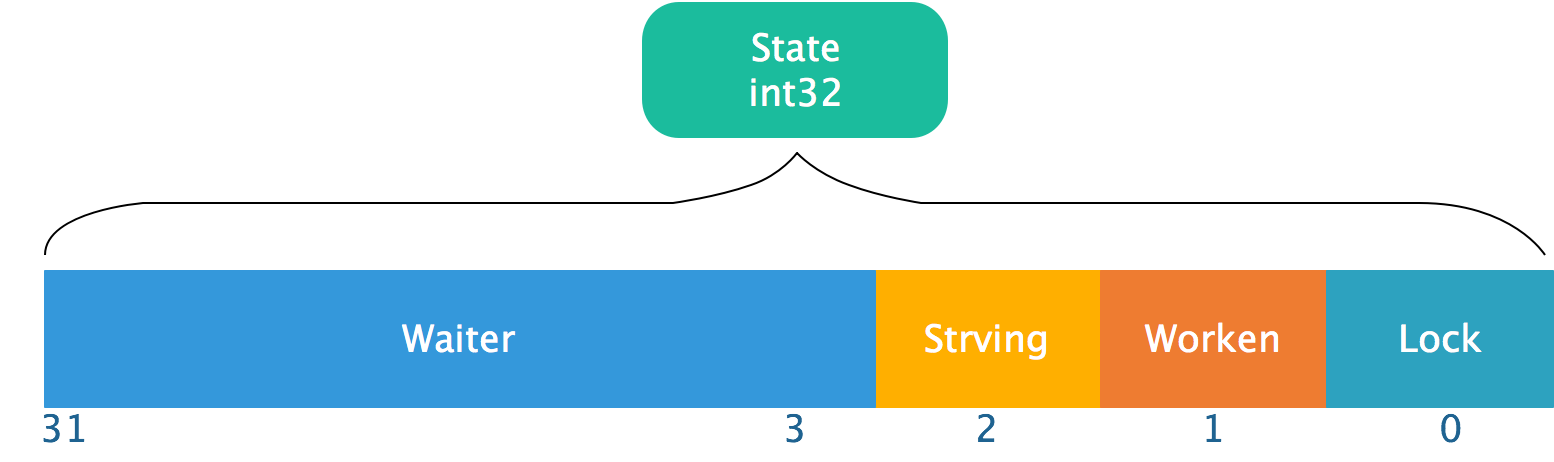 #### Lock
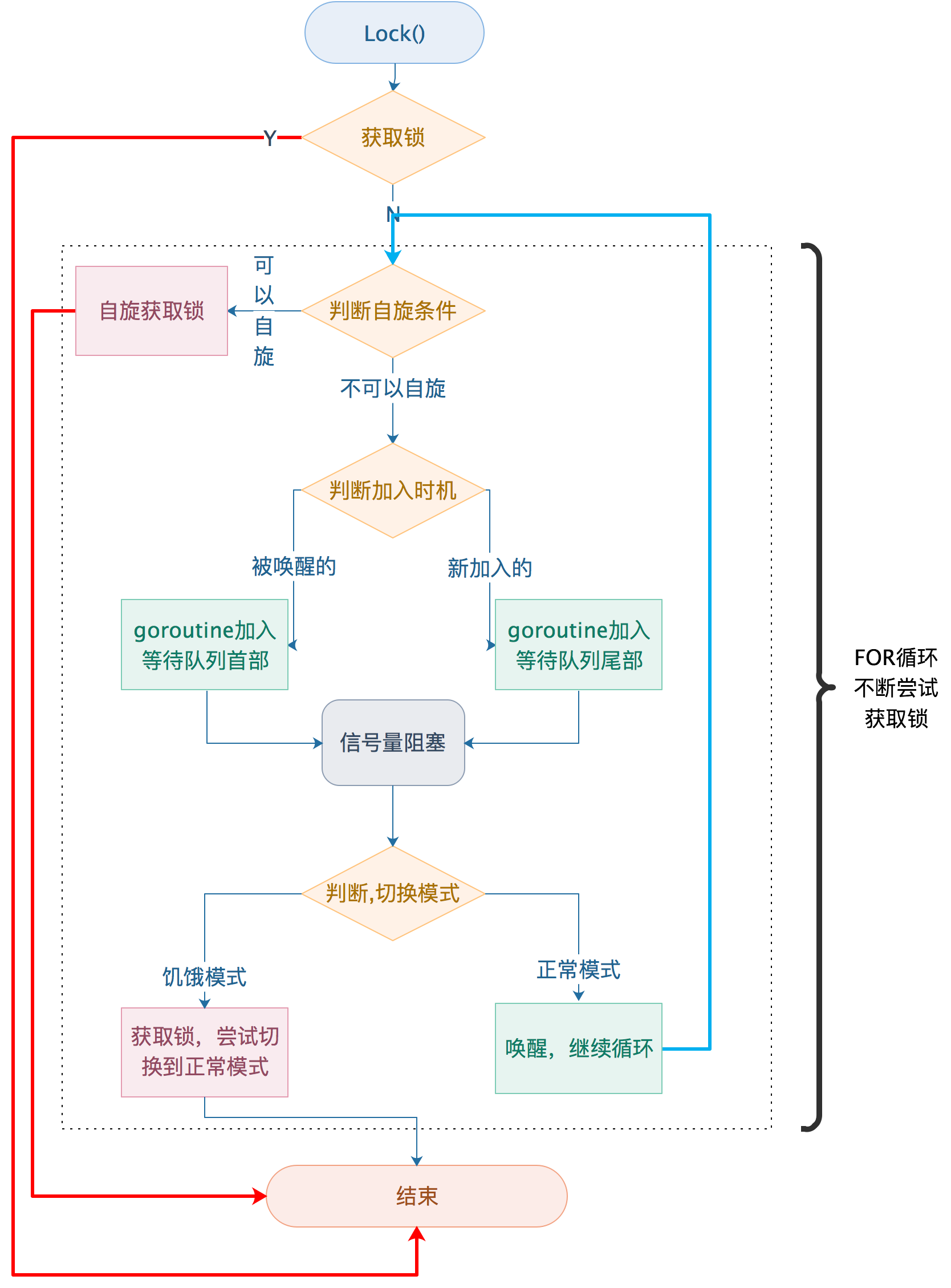
加鎖基本上就這三種情況:
1、可直接獲取鎖,直接加鎖,返回;
2、有衝突 首先自旋,如果其他`goroutine`在這段時間內釋放了該鎖,直接獲得該鎖;如果沒有就走到下面3;
3、有衝突,且已經過了自旋階段,通過訊號量進行阻塞;
- 1、剛被喚醒的 加入到等待佇列首部;
- 2、新加入的 加入到等待佇列的尾部。
4、有衝突,根據不同的模式做處理;
- 1、飢餓模式 獲取鎖
- 2、正常模式 喚醒,繼續迴圈,回到2
```go
// Lock locks m.
// 如果鎖正在使用中,新的goroutine請求,將被阻塞,直到鎖被釋放
func (m *Mutex) Lock() {
// 原子的(cas)來判斷是否加鎖
// 如果可以獲取鎖,直接加鎖,返回
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// 這把鎖,已經被別的goroutine持有
m.lockSlow()
}
func (m *Mutex) lockSlow() {
var waitStartTime int64
// 是否處於飢餓模式
starving := false
// 用來存當前goroutine是否已喚醒
awoke := false
// 用來存當前goroutine的迴圈次數
iter := 0
// 記錄下當前的狀態
old := m.state
for {
// 第一個條件是state已被鎖,但是不是飢餓狀態。如果時飢餓狀態,自旋時沒有用的,鎖的擁有權直接交給了等待佇列的第一個。
// 第二個條件是還可以自旋,多核、壓力不大並且在一定次數內可以自旋, 具體的條件可以參考`sync_runtime_canSpin`的實現。
// 如果滿足這兩個條件,不斷自旋來等待鎖被釋放、或者進入飢餓狀態、或者不能再自旋。
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// 自旋的過程中如果發現state還沒有設定woken標識,則設定它的woken標識, 並標記自己為被喚醒。
if !awoke && old&mutexWoken == 0 && old>
#### Lock
加鎖基本上就這三種情況:
1、可直接獲取鎖,直接加鎖,返回;
2、有衝突 首先自旋,如果其他`goroutine`在這段時間內釋放了該鎖,直接獲得該鎖;如果沒有就走到下面3;
3、有衝突,且已經過了自旋階段,通過訊號量進行阻塞;
- 1、剛被喚醒的 加入到等待佇列首部;
- 2、新加入的 加入到等待佇列的尾部。
4、有衝突,根據不同的模式做處理;
- 1、飢餓模式 獲取鎖
- 2、正常模式 喚醒,繼續迴圈,回到2
```go
// Lock locks m.
// 如果鎖正在使用中,新的goroutine請求,將被阻塞,直到鎖被釋放
func (m *Mutex) Lock() {
// 原子的(cas)來判斷是否加鎖
// 如果可以獲取鎖,直接加鎖,返回
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// 這把鎖,已經被別的goroutine持有
m.lockSlow()
}
func (m *Mutex) lockSlow() {
var waitStartTime int64
// 是否處於飢餓模式
starving := false
// 用來存當前goroutine是否已喚醒
awoke := false
// 用來存當前goroutine的迴圈次數
iter := 0
// 記錄下當前的狀態
old := m.state
for {
// 第一個條件是state已被鎖,但是不是飢餓狀態。如果時飢餓狀態,自旋時沒有用的,鎖的擁有權直接交給了等待佇列的第一個。
// 第二個條件是還可以自旋,多核、壓力不大並且在一定次數內可以自旋, 具體的條件可以參考`sync_runtime_canSpin`的實現。
// 如果滿足這兩個條件,不斷自旋來等待鎖被釋放、或者進入飢餓狀態、或者不能再自旋。
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// 自旋的過程中如果發現state還沒有設定woken標識,則設定它的woken標識, 並標記自己為被喚醒。
if !awoke && old&mutexWoken == 0 && old> >mutexWaiterShift == 1 {
// 退出飢餓模式
// 在這裡這麼做至關重要,還要考慮等待時間。
// 飢餓模式是非常低效率的,一旦兩個goroutine將互斥鎖切換為飢餓模式,它們便可以無限鎖。
delta -= mutexStarving
}
// 原子的加上更新的值
atomic.AddInt32(&m.state, delta)
break
}
// 不是飢餓模式,就把當前的goroutine設為被喚醒
awoke = true
// 重置迴圈的次數
iter = 0
} else {
// 如果CAS不成功,也就是說沒能成功獲得鎖,鎖被別的goroutine獲得了或者鎖一直沒被釋放
// 那麼就更新狀態,重新開始迴圈嘗試拿鎖
old = m.state
}
}
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
}
const (
active_spin = 4
)
// src/runtime/proc.go
// Active spinning for sync.Mutex.
// go:linkname sync_runtime_canSpin sync.runtime_canSpin
// go:nosplit
func sync_runtime_canSpin(i int) bool {
// sync.Mutex是會被多個goroutine競爭的,所以自旋的次數需要控制
// active_spin的值為4
// 滿足下面的新增才會發生自旋
// 1、自旋的次數小於active_spin也就是4
// 2、如果在單核的cpu是不能自旋的
// 3、 GOMAXPROCS> 1,並且至少有一個其他正在執行的P,並且本地runq為空。
// 4、當前P沒有其它等待執行的G
if i >= active_spin || ncpu <= 1 || gomaxprocs <= int32(sched.npidle+sched.nmspinning)+1 {
return false
}
if p := getg().m.p.ptr(); !runqempty(p) {
return false
}
return true
}
// src/runtime/proc.go
// go:linkname sync_runtime_doSpin sync.runtime_doSpin
// go:nosplit
// procyield的實現是用匯編實現的
func sync_runtime_doSpin() {
procyield(active_spin_cnt)
}
// src/runtime/asm_amd64.s
TEXT runtime·procyield(SB),NOSPLIT,$0-0
MOVL cycles+0(FP), AX
again:
// 讓加鎖失敗時cpu睡眠30個(about)clock,從而使得讀操作的頻率低很多。流水線重排的代價也會小很多
PAUSE
SUBL $1, AX
JNZ again
RET
```
梳理下流程
1、原子的(cas)來判斷是否加鎖,如果之前鎖沒有被使用,當前`goroutine`獲取鎖,結束本次`Lock`操作;
2、如果已經被別的`goroutine`持有了,啟動一個for迴圈去搶佔鎖;
會存在兩種狀態的切換 飢餓狀態和正常狀態
如果一個等待的goroutine有超過1ms(寫死在程式碼中)都沒獲取到鎖,那麼就會把鎖轉變為飢餓模式
如果一個goroutine獲取到了鎖之後,它會判斷以下兩種情況:
- 1、它是佇列中最後一個goroutine;
- 2、它拿到鎖所花的時間小於1ms;
以上只要有一個成立,它就會把鎖轉變回正常模式。
3、如果鎖已經被鎖了,並且不是飢餓狀態,並且滿足自旋的條件,當前goroutine會不斷的進行自旋,等待鎖被釋放;
4、不滿足鎖自旋的條件,然後結束自旋,這是當前鎖的狀態可能有下面幾種情況:
- 1、鎖還沒有被釋放,鎖處於正常狀態
- 2、鎖還沒有被釋放, 鎖處於飢餓狀態
- 3、鎖已經被釋放, 鎖處於正常狀態
- 4、鎖已經被釋放, 鎖處於飢餓狀態
5、如果`old.state`不是飢餓狀態,新的`goroutine`嘗試去獲鎖,如果是飢餓狀態,就直接將鎖直接轉給等待佇列的第一個;
6、如果鎖是被獲取或飢餓狀態,等待者的數量加一;
7、當本`goroutine`被喚醒了,要麼獲得了鎖,要麼進入休眠;
8、如果`old state`的狀態是未被鎖狀態,並且鎖不處於飢餓狀態,那麼當前`goroutine`已經獲取了鎖的擁有權,結束`Lock`;
9、判斷一下當前`goroutine`是新來的還是剛被喚醒的,新來的加入到等待佇列的尾部,剛被喚醒的加入到等待佇列的頭部,然後通過訊號量阻塞,直到當前`goroutine`被喚醒;
10、判斷如果當前`state`是否是飢餓狀態,不是的喚醒本次`goroutine`,繼續迴圈,是飢餓狀態繼續往下面走;
11、飢餓狀態,當前`goroutine`來設定鎖,等待者減一,如果當前`goroutine`是佇列中最後一個`goroutine`設定飢餓狀態為正常,拿到鎖結束`Lock`。
 ##### 位運算
上面有很多關於&和|的運算和判斷,下面來具體的分析下
```
& 位運算 AND
| 位運算 OR
^ 位運算 XOR
&^ 位清空(AND NOT)
<< 左移
>> 右移
```
**&**
參與運算的兩數各對應的二進位相與,兩個二進位制位都為1時,結果才為1
```
0101
AND 0011
= 0001
```
**|**
參與運算的兩數各對應的二進位相或,兩個二進位制位都為1時,結果才為0
```go
0101(十進位制5)
OR 0011(十進位制3)
= 0111(十進位制7)
```
**^**
按位異或運算,對等長二進位制模式或二進位制數的每一位執行邏輯異或操作。操作的結果是如果某位不同則該位為1,否則該位為0。
```
0101
XOR 0011
= 0110
```
**&^**
將運算子左邊資料相異的位保留,相同位清零
```
0001 0100
&^ 0000 1111
= 0001 0000
```
**<<**
各二進位全部左移若干位,高位丟棄,低位補0
```
0001(十進位制1)
<< 3(左移3位)
= 1000(十進位制8)
```
**>>**
各二進位全部右移若干位,對無符號數,高位補0,有符號數,各編譯器處理方法不一樣,有的補符號位(算術右移),有的補0
```
1010(十進位制10)
>> 2(右移2位)
= 0010(十進位制2)
```
#### Unlock
```go
// Unlock unlocks m.
// 如果沒有lock就去unlocak是會報錯的
//
//一個鎖定的互斥鎖與一個特定的goroutine沒有關聯。
// 它允許一個goroutine鎖定一個互斥鎖然後
// 安排另一個goroutine解鎖它。
func (m *Mutex) Unlock() {
if race.Enabled {
_ = m.state
race.Release(unsafe.Pointer(m))
}
// 修改state的狀態
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// 不為0,說明沒有成功解鎖
m.unlockSlow(new)
}
}
func (m *Mutex) unlockSlow(new int32) {
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
if new&mutexStarving == 0 {
old := new
for {
// 如果說鎖沒有等待拿鎖的goroutine
// 或者鎖被獲取了(在迴圈的過程中被其它goroutine獲取了)
// 或者鎖是被喚醒狀態(表示有goroutine被喚醒,不需要再去嘗試喚醒其它goroutine)
// 或者鎖是飢餓模式(會直接轉交給佇列頭的goroutine)
// 那麼就直接返回,啥都不用做了
// 也就是沒有等待的goroutine, 或者鎖不處於空閒的狀態,直接返回.
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// 走到這一步的時候,說明鎖目前還是空閒狀態,並且沒有goroutine被喚醒且佇列中有goroutine等待拿鎖
// 將等待的goroutine數減一,並設定woken標識
new = (old - 1<
##### 位運算
上面有很多關於&和|的運算和判斷,下面來具體的分析下
```
& 位運算 AND
| 位運算 OR
^ 位運算 XOR
&^ 位清空(AND NOT)
<< 左移
>> 右移
```
**&**
參與運算的兩數各對應的二進位相與,兩個二進位制位都為1時,結果才為1
```
0101
AND 0011
= 0001
```
**|**
參與運算的兩數各對應的二進位相或,兩個二進位制位都為1時,結果才為0
```go
0101(十進位制5)
OR 0011(十進位制3)
= 0111(十進位制7)
```
**^**
按位異或運算,對等長二進位制模式或二進位制數的每一位執行邏輯異或操作。操作的結果是如果某位不同則該位為1,否則該位為0。
```
0101
XOR 0011
= 0110
```
**&^**
將運算子左邊資料相異的位保留,相同位清零
```
0001 0100
&^ 0000 1111
= 0001 0000
```
**<<**
各二進位全部左移若干位,高位丟棄,低位補0
```
0001(十進位制1)
<< 3(左移3位)
= 1000(十進位制8)
```
**>>**
各二進位全部右移若干位,對無符號數,高位補0,有符號數,各編譯器處理方法不一樣,有的補符號位(算術右移),有的補0
```
1010(十進位制10)
>> 2(右移2位)
= 0010(十進位制2)
```
#### Unlock
```go
// Unlock unlocks m.
// 如果沒有lock就去unlocak是會報錯的
//
//一個鎖定的互斥鎖與一個特定的goroutine沒有關聯。
// 它允許一個goroutine鎖定一個互斥鎖然後
// 安排另一個goroutine解鎖它。
func (m *Mutex) Unlock() {
if race.Enabled {
_ = m.state
race.Release(unsafe.Pointer(m))
}
// 修改state的狀態
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// 不為0,說明沒有成功解鎖
m.unlockSlow(new)
}
}
func (m *Mutex) unlockSlow(new int32) {
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
if new&mutexStarving == 0 {
old := new
for {
// 如果說鎖沒有等待拿鎖的goroutine
// 或者鎖被獲取了(在迴圈的過程中被其它goroutine獲取了)
// 或者鎖是被喚醒狀態(表示有goroutine被喚醒,不需要再去嘗試喚醒其它goroutine)
// 或者鎖是飢餓模式(會直接轉交給佇列頭的goroutine)
// 那麼就直接返回,啥都不用做了
// 也就是沒有等待的goroutine, 或者鎖不處於空閒的狀態,直接返回.
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// 走到這一步的時候,說明鎖目前還是空閒狀態,並且沒有goroutine被喚醒且佇列中有goroutine等待拿鎖
// 將等待的goroutine數減一,並設定woken標識
new = (old - 1<
### 總結
1、加鎖的過程會存在正常模式和互斥模式的轉換;
2、飢餓模式就是保證鎖的公平性,正常模式下的互斥鎖能夠提供更好地效能,飢餓模式的能避免 Goroutine 由於陷入等待無法獲取鎖而造成的高尾延時;
3、鎖的狀態的轉換,也使用到了位運算;
4、一個已經鎖定的互斥鎖,允許其他協程進行解鎖,不過只能被解鎖一次;
### 參考
【sync.Mutex 原始碼分析】https://reading.hidevops.io/articles/sync/sync_mutex_source_code_analysis/
【一份詳細註釋的go Mutex原始碼】http://cbsheng.github.io/posts/%E4%B8%80%E4%BB%BD%E8%AF%A6%E7%BB%86%E6%B3%A8%E9%87%8A%E7%9A%84go-mutex%E6%BA%90%E7%A0%81/
【原始碼剖析 golang 中 sync.Mutex】https://www.purewhite.io/2019/03/28/golang-mutex-source/
【sync.mutex 原始碼分析】https://colobu.com/2018/12/18/dive-into-sync-mutex/
【原始碼剖析 golang 中 sync.Mutex】https://www.purewhite.io/2019/03/28/golang-mutex-source/
>**本文作者**:liz
>**本文連結**:https://boilingfrog.github.io/2021/03/14/sync.Mutex/
>**版權宣告**:本文為博主原創文章,遵循 [CC 4.0 BY-SA](https://creativecommons.org/licenses/by-sa/4.0/) 版權協議,轉載請附上原文出處連結和本聲
#### Lock
加鎖基本上就這三種情況:
1、可直接獲取鎖,直接加鎖,返回;
2、有衝突 首先自旋,如果其他`goroutine`在這段時間內釋放了該鎖,直接獲得該鎖;如果沒有就走到下面3;
3、有衝突,且已經過了自旋階段,通過訊號量進行阻塞;
- 1、剛被喚醒的 加入到等待佇列首部;
- 2、新加入的 加入到等待佇列的尾部。
4、有衝突,根據不同的模式做處理;
- 1、飢餓模式 獲取鎖
- 2、正常模式 喚醒,繼續迴圈,回到2
```go
// Lock locks m.
// 如果鎖正在使用中,新的goroutine請求,將被阻塞,直到鎖被釋放
func (m *Mutex) Lock() {
// 原子的(cas)來判斷是否加鎖
// 如果可以獲取鎖,直接加鎖,返回
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// 這把鎖,已經被別的goroutine持有
m.lockSlow()
}
func (m *Mutex) lockSlow() {
var waitStartTime int64
// 是否處於飢餓模式
starving := false
// 用來存當前goroutine是否已喚醒
awoke := false
// 用來存當前goroutine的迴圈次數
iter := 0
// 記錄下當前的狀態
old := m.state
for {
// 第一個條件是state已被鎖,但是不是飢餓狀態。如果時飢餓狀態,自旋時沒有用的,鎖的擁有權直接交給了等待佇列的第一個。
// 第二個條件是還可以自旋,多核、壓力不大並且在一定次數內可以自旋, 具體的條件可以參考`sync_runtime_canSpin`的實現。
// 如果滿足這兩個條件,不斷自旋來等待鎖被釋放、或者進入飢餓狀態、或者不能再自旋。
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
// 自旋的過程中如果發現state還沒有設定woken標識,則設定它的woken標識, 並標記自己為被喚醒。
if !awoke && old&mutexWoken == 0 && old>
##### 位運算
上面有很多關於&和|的運算和判斷,下面來具體的分析下
```
& 位運算 AND
| 位運算 OR
^ 位運算 XOR
&^ 位清空(AND NOT)
<< 左移
>> 右移
```
**&**
參與運算的兩數各對應的二進位相與,兩個二進位制位都為1時,結果才為1
```
0101
AND 0011
= 0001
```
**|**
參與運算的兩數各對應的二進位相或,兩個二進位制位都為1時,結果才為0
```go
0101(十進位制5)
OR 0011(十進位制3)
= 0111(十進位制7)
```
**^**
按位異或運算,對等長二進位制模式或二進位制數的每一位執行邏輯異或操作。操作的結果是如果某位不同則該位為1,否則該位為0。
```
0101
XOR 0011
= 0110
```
**&^**
將運算子左邊資料相異的位保留,相同位清零
```
0001 0100
&^ 0000 1111
= 0001 0000
```
**<<**
各二進位全部左移若干位,高位丟棄,低位補0
```
0001(十進位制1)
<< 3(左移3位)
= 1000(十進位制8)
```
**>>**
各二進位全部右移若干位,對無符號數,高位補0,有符號數,各編譯器處理方法不一樣,有的補符號位(算術右移),有的補0
```
1010(十進位制10)
>> 2(右移2位)
= 0010(十進位制2)
```
#### Unlock
```go
// Unlock unlocks m.
// 如果沒有lock就去unlocak是會報錯的
//
//一個鎖定的互斥鎖與一個特定的goroutine沒有關聯。
// 它允許一個goroutine鎖定一個互斥鎖然後
// 安排另一個goroutine解鎖它。
func (m *Mutex) Unlock() {
if race.Enabled {
_ = m.state
race.Release(unsafe.Pointer(m))
}
// 修改state的狀態
new := atomic.AddInt32(&m.state, -mutexLocked)
if new != 0 {
// 不為0,說明沒有成功解鎖
m.unlockSlow(new)
}
}
func (m *Mutex) unlockSlow(new int32) {
if (new+mutexLocked)&mutexLocked == 0 {
throw("sync: unlock of unlocked mutex")
}
if new&mutexStarving == 0 {
old := new
for {
// 如果說鎖沒有等待拿鎖的goroutine
// 或者鎖被獲取了(在迴圈的過程中被其它goroutine獲取了)
// 或者鎖是被喚醒狀態(表示有goroutine被喚醒,不需要再去嘗試喚醒其它goroutine)
// 或者鎖是飢餓模式(會直接轉交給佇列頭的goroutine)
// 那麼就直接返回,啥都不用做了
// 也就是沒有等待的goroutine, 或者鎖不處於空閒的狀態,直接返回.
if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 {
return
}
// 走到這一步的時候,說明鎖目前還是空閒狀態,並且沒有goroutine被喚醒且佇列中有goroutine等待拿鎖
// 將等待的goroutine數減一,並設定woken標識
new = (old - 1<