
詳解YUV系列(三)----YUV420
前兩講詳細講解了YUV444以及YUV422兩種格式,實際中這兩種格式使用的相對較少,使用比較多的便是本節要梳理的YUV420格式嘍,同樣,老辦法,老套路嘍。
一、文字描述:
YUV420格式的采樣,對於每個2*2的像素塊中,采樣4次Y,采樣1次U和1次V。與YUV422相同,不同的存儲方式同樣也形成了不同的格式,詳見存儲示意圖嘍。
二、采樣示意圖
註: 示意圖出於直觀,將每4個像素采樣的U,V分量都畫在第一個像素點內,而實際上每4個Y共用的一組U,V分量的值是根據四個像素的本來的U,V值進行插值而得到的,這裏不贅述,後續有機會再做詳解。

三、存儲示意圖
(一) Three plane: Y, U, V分別存儲,分別對應一個plane,統稱為YUV420P格式

YU12: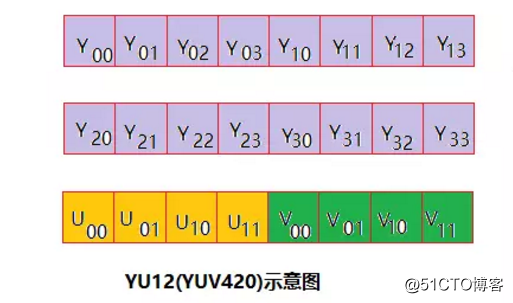
(二) Two plane: Y和UV分別存儲,Y對應一個plane, UV對應一個plane,統稱為YUV420SP格式
NV12: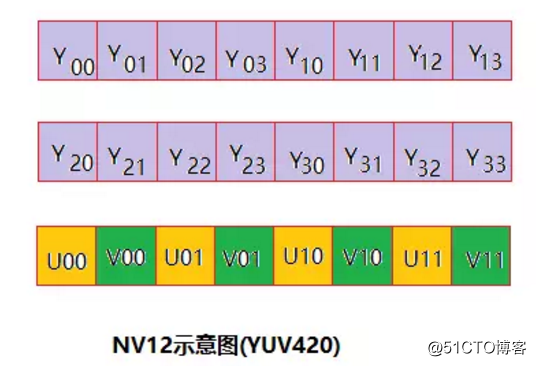
NV21:
詳解YUV系列(三)----YUV420
相關推薦
詳解YUV系列(三)----YUV420
roc 根據 系列 watermark 存儲方式 圖片 images src fff 前兩講詳細講解了YUV444以及YUV422兩種格式,實際中這兩種格式使用的相對較少,使用比較多的便是本節要梳理的YUV420格式嘍,同樣,老辦法,老套路嘍。 一、文字描述:YUV
詳解yuv系列(一)---YUV444
存儲空間 根據 字節 roc 排列 原因 每一個 mar size 本篇詳細分析YUV444格式: 一、文字描述首先從文字敘述的角度來講,這個格式相對比較簡單一些,就是真對每一個像素都要分別采樣Y, U, V的值。從物理存儲的角度來講,也就是每一個像素的表示都需要有3個字節
詳解YUV系列(二)--YUV422
proc 衍生 watermark term fff 本質 image 描述 采樣 hi,各位小夥伴,小編又來了嘍,今天該給大家分享一下YUV422嘍,還是老規矩,老套路哦: 一、文字描述采樣格式:YUV422的采樣格式,簡單理解就是一個2*2的像素塊中,對於4個像素點,采
詳解SVM系列(三):線性可分支援向量機與硬間隔最大化
支援向量機概覽(support vector machines SVM) 支援向量機是一種二類分類模型。它的基本模型是定義在特徵空間上的間隔最大(間隔最大區別於感知機)線性分類器(核函式可以用非線性的分類)。 支援向量機的學習策略是間隔最大化可形式化為一個求解凸二次規劃的問題。 也等
完整詳解GCD系列(三)dispatch_group
/////-------------注意----------------這篇文章是在Swift 1.0時代寫的,已經不適合當前的語法。關於Swift最新版本的GCD,參見我的這篇部落格GCD精講/////-------------注意----------------一、dis
JDK的Proxy技術實現AOP,InvocationHandler和Proxy詳解——Spring AOP(三)
上一章已經講到了想要完成AOP的設計原理以及要實現AOP功能,得需要使用代理模式: 本章就介紹一個實現動態代理的兩種方式之一——JDK中的Proxy技術 AOP實現原理(使用JDK中的Proxy技術實現AOP功能,InvocationHandler和Proxy(Class)詳解
詳解SVM系列(二):拉格朗日對偶性
拉格朗日函式有什麼用? 在約束最優化問題中,常常利用拉格朗日對偶性將原始問題轉換為對偶問題,通過解對偶問題而得到原始問題的解。 原始問題: 假設 f (
詳解SVM系列(一):感知機
什麼是感知機 感知機是二類分類的線性分類模型,其輸入為例項的特徵向量,輸出為例項的類別,取+1和-1二值。 感知機對應於輸入空間(特徵空間)中將例項分為正負兩類的分離超平面,屬於判別模型。 感知機旨在求出將訓練資料進行線性劃分的分離超平面,為此,匯入基於誤分類的損失函式,利用梯度
Android NDK——必知必會之JNI的C++操作函式詳解和小結(三)
引言 上一篇講解了一些關於JNI和NDK的必知必會的理論知識和機制,由於篇幅問題把關於JNI的重要的函式放到這篇,具體使用留到下一篇,此係列文章基連結: 一、JNI中的函式概述 在JNI層我們基本上都是通過env指標來呼叫jni.h標頭檔案裡定義的函式,JNI
詳解設計模式(三)
原文連結:http://blog.csdn.net/zhangerqing/article/details/8243942 今天會講到第三類設計模式——行為型模式,共11種:策略模式、模板方法模式、觀察者模式、迭代子模式、責任
詳解SVM系列(六):深入解析 序列最小最優化SMO演算法一
SMO演算法是幹啥的 首先要先搞明白一個基本的問題: SMO演算法是幹啥的? 通過前面的介紹,我們現在掌握了線性不可分支援向量機。其形式為如下的凸二次規劃: m
詳解SVM系列(五):非線性支援向量機與核函式
對解線性分類問題,線性分類支援向量機是一種有效的方法。但是,有時分類問題是非線性的,這時可以使用非線性支援向量機。 核技巧 **非線性分類問題:**如上面左圖所示,能用 R
詳解SVM系列(四):線性支援向量機與軟間隔最大化
線性支援向量機 線性可分問題的支援向量機學習方法,對線性不可分訓練資料是不適用的,因為這時上述方法的不等式約束並不能都成立。 舉2個例子: 如果沒有混入異常點,導致不能線性可分,則資料可以按上面的實線來做超平面分離的。 這種情況雖然不是不可分的,但是由於其中的一個藍色點不滿足線性
完整詳解GCD系列(二)dispatch_after;dispatch_apply;dispatch_
本教涵蓋的內容 一、dispatch_after 二、dispatch_apply 三、dispatch_once一、dispatch_after 功能:延遲一段時間把一項任務提交到佇列中執行,返回之後就不能取消 常用來在在主佇列上延遲執行一項任務 函式原型func dispatch_after(_ wh
HTTP詳解--Http協議(三)
一.什麼是http協議? 1.約定客戶端和伺服器端之間的通訊格式,只有約定了格式,兩者才能互相交流,這就是HTTP協議。可以區分哪端是客戶端,哪端是伺服器端。 協議規定:請求從客戶端發出,最後伺服器端
Redis資料結構詳解之Set(三)
序言 在Redis中,Set和list都是字串序列,非常相似,不同之處在於Set是用雜湊表來保持字串的唯一性,沒有先後順序,不像list一樣,可以在首尾增刪資料。但是set也有自己的相應處理命令來完成對自己的操作。下面我們來看下Set的命令怎麼使用。 操作單個set的
深入淺出Mybatis原始碼系列(三)---配置詳解之properties與environments(mybatis原始碼篇)
上篇文章《深入淺出Mybatis原始碼系列(二)---配置簡介(mybatis原始碼篇)》我們通過對mybatis原始碼的簡單分析,可看出,在mybatis配置檔案中,在configuration根節點下面,可配置properties、typeAliases、plugins、
OSGI學習系列(三)MANIFEST.MF詳解
<一>在osgi專案中META-INF目錄下有一個MANIFEST.MF檔案,是載入bundle時必不可少的,如下圖所示: <二>下面簡單解釋一下其中的幾個元素 #幾個必須的
Android Camera 系列(三)Camera API 詳解
概述 Camera 可能是接下來個人想深入學習的課題,準備新起一個系列,從個人的角度總結闡述自己對於 Android Camera 的研究過程,希望也能夠對其他想學習 Camera 的同學一些幫助。 本小節內容為 Android Camera 官方文件 的精要
完整詳解swift GCD系列(三)dispatch_group
原創Blog,轉載請註明出處http://blog.csdn.net/column/details/swift-gcd.html一、dispatch_group把一組任務提交到佇列中,這些佇列可以不相關,然後堅挺這組任務完成的事件。幾個用到的函式1、dispatch_gro