
目標定位和檢測系列中IOU的含義
本文轉自:https://blog.csdn.net/sinat_34474705/article/details/80045294
交併比(Intersection over Union)和非極大值抑制是(Non-Maximum Suppression)是目標檢測任務中非常重要的兩個概念。例如在用訓練好的模型進行測試時,網路會預測出一系列的候選框。這時候我們會用NMS來移除一些多餘的候選框。即移除一些IOU值大於某個閾值的框。然後在剩下的候選框中,分別計算與ground truth的IOU值,通常會規定當候選框和ground truth的IOU值大於0.5時,認為檢測正確。下面我們分別用python實現IOU和NMS。
交併比IOU
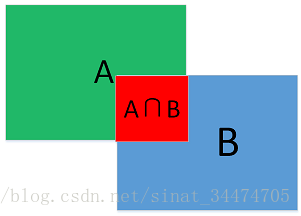
如上圖所示,IOU值定位為兩個矩形框面積的交集和並集的比值。即:
IOU=A∩B/A∪B
--------------------- 作者:Meringue_zz 來源:CSDN 原文:https://blog.csdn.net/sinat_34474705/article/details/80045294?utm_source=copy 版權宣告:本文為博主原創文章,轉載請附上博文連結!
相關推薦
目標定位和檢測系列中IOU的含義
本文轉自:https://blog.csdn.net/sinat_34474705/article/details/80045294 交併比(Intersection over Union)和非極大值抑制是(Non-Maximum Suppression)是目標檢測任務中非常重要的兩個概念。例如
目標定位和檢測系列:交併比(IOU)和非極大值抑制(NMS)的python與C/C++實現
Python實現 交併比(Intersection over Union)和非極大值抑制是(Non-Maximum Suppression)是目標檢測任務中非常重要的兩個概念。例如在用訓練好的模型進行測試時,網路會預測出一系列的候選框。這時候我們會用NMS來移除一些多餘的候選框。即移除一些IOU
目標定位和檢測系列(3):交併比(IOU)和非極大值抑制(NMS)的python實現
交併比(Intersection over Union)和非極大值抑制是(Non-Maximum Suppression)是目標檢測任務中非常重要的兩個概念。例如在用訓練好的模型進行測試時,網路會預測出一系列的候選框。這時候我們會用NMS來移除一些多餘的候選框。
目標定位和檢測系列(1):一些基本概念
最近開始學習深度學習中的定位和檢測任務。本來打算直接看論文,卻發現文章中的的很多基本概念都搞不清楚,於是就自己先梳理了一些定位和檢測任務的基本概念。(內容主要來自斯坦福大學的CS231課程、吳恩達的deeplearning.ai卷積部分,這兩門課程都可以在網易雲
網站優化之電子商務的目標定位和戰略
對於電子商務這個火爆且飛速變化的行業來說,增加網站建設流量的定位和戰略甚為重要。通過SEO增加產品銷量,這個估計是絕大部門B2C開始要得到的目的,特別是電商低階進入著,並且位置越高要求越輕易提出這個目標。首先來看產品銷量的構成,幾個簡單的公式:產品銷量=新客戶訂單數目新客戶均勻訂單產品數目+老客戶訂單數目老客
CS231n物體定位和檢測
一般流程參考 方法一:把定位作為迴歸問題(很實用可以這樣考慮) 選擇防止迴歸曾的位置,都可以 法二:滑動窗法,如overfeat網路 加速(高效)視窗法:不把4096看作向量,而是看作feature map特徵對映, 那麼只剩下卷積和池化操作 (分類方
【 專欄 】- 深度學習進行目標定位和識別
深度學習進行目標定位和識別 在這個專欄中,我們以RCNN作為首先第一篇,然後講解spp net,Fast RCNN,以及Faster RCNN,還有YOLO等等網路結構,按它的提出順序(因為後面提出的網路往往是針對前面網路的問題而
嘗試用OpenCV的模板匹配來定位和檢測
1.OpenCV的模板匹配函式: CV_EXPORTS_W void matchTemplate( InputArray image, InputArray templ, OutputArray result, int method ); 模板匹配的工作方式
目標分割和檢測筆記(OpenCV例項精解)
版本說明:Opencv 3.2.0版本 一.預處理 1.去噪聲 根據噪聲的種類選擇合適的濾波器進行去除。 2.去除光亮 需從場景中的其他影象提取位於完全相同位置,沒有任何物件,並且具有相同光照條件的影象。然後用一種簡單的數學運算,刪除光這個模
目標檢測中IOU和NMS的python實現
IOU:兩個框的交併比 import numpy as np def compute_iou(box1, box2, wh=False): """ compute the iou of two boxes. Args: box1, box2: [xmin,
目標檢測系列(3):OverFeat和DeepMutliBox
Object detection 之 OverFeat OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks OverFeat:利用卷積
目標檢測中IOU的介紹(Intersection over Union)
IOU的輸入 1 ground-truth的bounding box 2 預測的bounding box IOU的輸出 輸出為值在[0,1]之間的數字 IOU = 兩個矩形交集的面積/兩個矩形的並集面積 Reference: https://www.
css中絕對定位和相對定位,文檔流的理解
css 定位 相關鏈接:http://blog.csdn.net/libertea/article/details/11662661 今天在這裏看到了關於一個定位的博客,感覺講的挺好的,在這裏分享一下鏈接。css中絕對定位和相對定位,文檔流的理解
[原創] css中的絕對定位和相對定位
www. relative get 邊界 原創 html 初始 一個 有關 我對博客的認識是:記錄問題,解決問題,分享知識。如果有輪子,我不需要造輪子。 首先,定位無論是相對定位還是絕對定位,必須有一個參考項,而這個參考項,專業術語稱之為 包含塊,這裏的包含塊是指
開發中如何合理使用CSS的相對定位和絕對定位
CSS在談論如何使用時。我們先來看看CSS對position屬性的相關定義: static:無特殊定位,對象遵循正常文檔流。top,right,bottom,left等屬性不會被應用。relative:對象遵循正常文檔流,但將依據top,right,bottom,left等屬性在正常文檔流中偏移位置。而其層疊
第二十五節,目標定位、特征點檢測依據目標檢測
回顧 邏輯 預測 簡單 AS 其中 輸入 操作 功能 一 目標定位 對象檢測,它是計算機視覺領域中一個新興的應用方向,相比前兩年,它的性能越來越好。在構建對象檢測之前,我們先了解一下對象定位,首先我們看看它的定義。 圖片分類任務我們已經熟悉了,就是算法遍歷圖片,判斷其中的
css中相對定位和絕對定位
絕對定位,元素可以放置到頁面上的任何位置 相對定位,元素相對於於原的位置。 <body> <div class="a"> 第一 </div> <div class="b"> 第二 </div
java中的NaN和檢測NaN
在java浮點數值計算都遵循IEEE 754規範,具體來說,下面是用於表示溢位和出錯情況的三個特殊的浮點數值: 正無窮大 負無窮大 NaN(不是一個數字) 例如,一個正整數除以0的結果為正無窮大,計算0/0或者負數的平方根結果為NaN。 常量Double.POS
劍指offer系列(十二)最小的k個數, 連續子陣列的最大和,整數中1出現的個數
最小的k個數 題目描述 輸入n個整數,找出其中最小的K個數。例如輸入4,5,1,6,2,7,3,8這8個數字,則最小的4個數字是1,2,3,4,。 解題思路: 思路1,這一題應用堆排序演算法複雜度只有O(nlog k),堆是完全二叉樹的一種,最大堆就是最上面的數是最大的,該方法基於二
目標檢測演算法中檢測框合併策略技術綜述
物體檢測(Object Detection)的任務是找出影象或視訊中的感興趣目標,同時實現輸出檢測目標的位置和類別,是機器視覺領域的核心問題之一,學術界已有將近二十年的研究歷史。隨著深度學習技術的火熱發展,目標檢測演算法也從基於手工特徵的傳統演算法轉向了基於深度神經網路的檢測技術。從最初 2013