
ROS-4 : ROS節點和主題 ROS-3 : Catkin工作空間和ROS功能包
依照<ROS-3 : Catkin工作空間和ROS功能包>,建立catkin工作空間,並在起src下建立功能包ros_demo_pkg,依賴項為roscpp、std_msgs、actionlib、actionlib_msgs,並構建該空功能包。ROS中節點間的基本通訊方式是topic,即publish/subscribe模式。以下介紹如何建立兩個兩個節點分別釋出和訂閱一個主題。
一、建立節點
1、建立釋出者節點topic_publisher
首先在功能包ros_demo_pkg下的src下建立第一個節點檔案topic_publisher.cpp。該節點在主題/numbers上釋出一個整數,其程式碼和詳解如下:
1 //roscpp client APIs的核心標頭檔案
2 #include "ros/ros.h"
3 //標準訊息型別Int32的標頭檔案
4 #include "std_msgs/Int32.h"
5 #include <iostream>
6
7 int main(int argc, char **argv)
8
9 {
10
11 //初始化ROS node--topic_publisher
12 ros::init(argc, argv,"topic_publisher");
13
14 //建立一個節點控制代碼物件,用於和ROS系統通訊
2、建立訂閱者節點topic_subscriber
接下來在功能包ros_demo_pkg下的src下建立第二個節點檔案topic_subscriber.cpp。該節點訂閱主題/numbers,接收該主題的訊息,其程式碼和詳解如下:
1 #include "ros/ros.h"
2 #include "std_msgs/Int32.h"
3 #include <iostream>
4
5 //Callback 函式,當有資料被髮布到主題/numbers時會呼叫該函式
6 void number_callback(const std_msgs::Int32::ConstPtr& msg)
7 {
8 ROS_INFO("Recieved [%d]",msg->data);
9 }
10
11 int main(int argc, char **argv)
12 {
13
14 //初始化ROS node --topic_subscriber
15 ros::init(argc, argv,"topic_subscriber");
16 ros::NodeHandle node_obj;
17 //建立一個訂閱者物件,設定主題名、緩衝區大小和callback函式
18 ros::Subscriber number_subscriber = node_obj.subscribe("/numbers",10,number_callback);
19 //Spinning the node
20 ros::spin();
21 return 0;
22 }
3、構建節點
為編譯並構建上述節點的原始碼,必須編輯功能包中的CMakeLists.txt檔案。
$ cd ~/catkin_ws/src/ros_demo_pkg
$ gedit CMakeList.txt
在已有的CMakeLists.txt檔案中加入以下程式碼:
## 指定標頭檔案的位置
include_directories(
include
${catkin_INCLUDE_DIRS}
)
## 宣告一個C++可執行檔案
## add_executable(node_name src/node_source_file.cpp)
add_executable(topic_publisher src/topic_publisher.cpp)
add_executable(topic_subscriber src/topic_subscriber.cpp)
## 新增可執行檔案所需的cmake target dependencies
## add_dependencies(node_name {package_name}_generate_messages_cpp)
add_dependencies(topic_publisher ros_demo_pkg_generate_messages_cpp)
add_dependencies(topic_subscriber ros_demo_pkg_generate_messages_cpp)
## 指定連結 a library 或 executable target所需的libraries
# target_link_libraries(node_name ${catkin_LIBRARIES} )
target_link_libraries(demo_topic_publisher ${catkin_LIBRARIES})
target_link_libraries(demo_topic_subscriber ${catkin_LIBRARIES})
然後就可以編譯上述節點並構建該功能包:切換到catkin工作空間再進行構建。
$ cd ~/catkin_ws
$ catkin_make

以上即為構建成功。
綜上,建立ROS節點包括以下幾個步驟:
- 在功能包的src下編寫節點的原始檔,即.cpp檔案
- 編輯功能包的CMakeLists.txt檔案,新增編譯和構建節點所需的內容;
- 構建功能包。
二、執行節點
ROS系統中執行任何節點前都必須先執行roscore。roscore將啟動ROS Master、ROS paramter和rosout logging nodes。
$ roscore
再在另兩個終端中分別執行上述兩個節點。先執行釋出者節點topic_publisher:
$ rosrun ros_demo_pkg topic_publisher
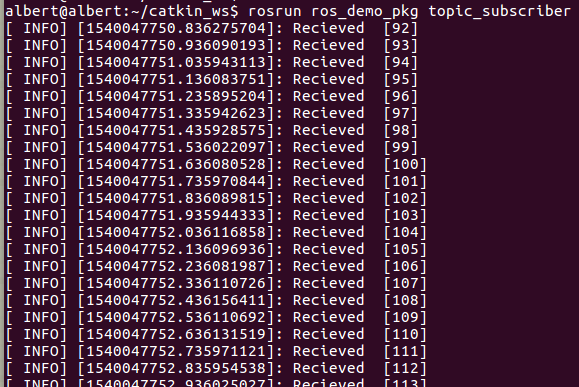
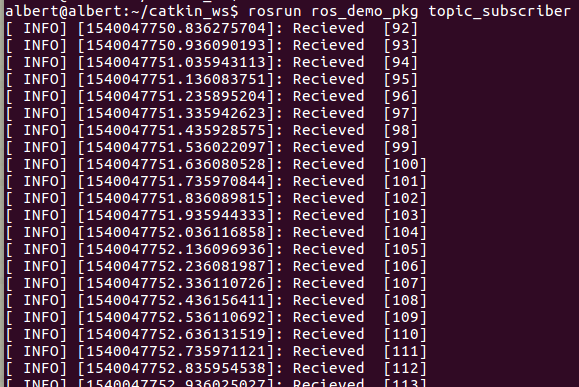
再執行訂閱者節點topic_subscriber:
$ rosrun ros_demo_pkg topic_subscriber
可看到兩個節點的執行結果如下圖:
綜上,執行以topic模式通訊的節點的過程如下:
- 在一個終端上執行roscore;
- 在另一個終端上執行主題釋出者節點;
- 在另一個終端上執行主題訂閱者節點。
在終端中輸入rqt_graph,可看到上述兩個節點間的通訊關係:
$ rqt_graph
