
mask_rcnn keras原始碼跟讀1)模型搭建
基礎知識:faster_rcnn相關內容,mask_rcnn相關內容
原始碼git:https://github.com/matterport/Mask_RCNN/tree/v2.1
1.模型搭建
主要在類MaskRCNN的build方法內(model.py_1822行)
1.1基礎網路_resnet101網路
# Build the shared convolutional layers.
# Bottom-up Layers
# Returns a list of the last layers of each stage, 5 in total. resnet_graph就是標準的resnet網路,如圖1所示C1,C2和layer_name對應,這裡沒有用C1(stage 5),C2, C3, C4, C5用於FPN網路
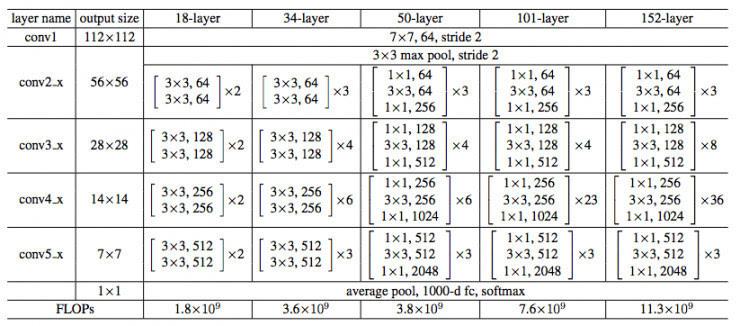 圖1-resnet
圖1-resnet
resnet相關介紹: https://blog.csdn.net/jiangpeng59/article/details/79609392
1.2 特徵提取網路_FPN網路
簡單介紹FPN:把底層的特徵和高層的特徵進行融合,便於細緻檢測。這裡P5=C5,然後P4=P5+C4,最終得到rpn_feature_maps,注意這裡多了個P6,其僅是由P5下采樣獲得。
FPN網路相關:https://blog.csdn.net/u014380165/article/details/72890275
# Top-down Layers
# TODO: add assert to 1.3 RPN網路
RPN主要實現2個功能:
1> box的前景色和背景色的分類
2>box框體的迴歸修正
# RPN Model
rpn = build_rpn_model(config.RPN_ANCHOR_STRIDE,
len(config.RPN_ANCHOR_RATIOS), 256)然後進入到build_rpn_model函式,其把rpn定義成模型,便於重複使用
def build_rpn_model(anchor_stride, anchors_per_location, depth):
"""Builds a Keras model of the Region Proposal Network.
It wraps the RPN graph so it can be used multiple times with shared
weights.
anchors_per_location: number of anchors per pixel in the feature map
anchor_stride: Controls the density of anchors. Typically 1 (anchors for
every pixel in the feature map), or 2 (every other pixel).
depth: Depth of the backbone feature map.
Returns a Keras Model object. The model outputs, when called, are:
rpn_logits: [batch, H, W, 2] Anchor classifier logits (before softmax)
rpn_probs: [batch, W, W, 2] Anchor classifier probabilities.
rpn_bbox: [batch, H, W, (dy, dx, log(dh), log(dw))] Deltas to be
applied to anchors.
"""
input_feature_map = KL.Input(shape=[None, None, depth],
name="input_rpn_feature_map")
outputs = rpn_graph(input_feature_map, anchors_per_location, anchor_stride)
return KM.Model([input_feature_map], outputs, name="rpn_model")主要看rpn_graph函式,首先對FPN傳遞過來的feature_map進行一個3*3的卷積(增強魯棒性?),然後對這個輸出的共享feature_map進行了2個分支:(1)前景和背景的分類 (2)框體座標迴歸
以背景/前景分類為例,shared的feature_map中每個畫素點都有anchors_per_location個anchor, 而每個anchor都有2個概率的取值(BG/FG),reshape後即可獲得所有anchor對應BG/FG的取值。
def rpn_graph(feature_map, anchors_per_location, anchor_stride):
"""Builds the computation graph of Region Proposal Network.
feature_map: backbone features [batch, height, width, depth]
anchors_per_location: number of anchors per pixel in the feature map
anchor_stride: Controls the density of anchors. Typically 1 (anchors for
every pixel in the feature map), or 2 (every other pixel).
Returns:
rpn_logits: [batch, H, W, 2] Anchor classifier logits (before softmax)
rpn_probs: [batch, H, W, 2] Anchor classifier probabilities.
rpn_bbox: [batch, H, W, (dy, dx, log(dh), log(dw))] Deltas to be
applied to anchors.
"""
# TODO: check if stride of 2 causes alignment issues if the featuremap
# is not even.
# Shared convolutional base of the RPN
shared = KL.Conv2D(512, (3, 3), padding='same', activation='relu',
strides=anchor_stride,
name='rpn_conv_shared')(feature_map)
# Anchor Score. [batch, height, width, anchors per location * 2].
x = KL.Conv2D(2 * anchors_per_location, (1, 1), padding='valid',
activation='linear', name='rpn_class_raw')(shared)
# Reshape to [batch, anchors, 2]
rpn_class_logits = KL.Lambda(
lambda t: tf.reshape(t, [tf.shape(t)[0], -1, 2]))(x)
# Softmax on last dimension of BG/FG.
rpn_probs = KL.Activation(
"softmax", name="rpn_class_xxx")(rpn_class_logits)
# Bounding box refinement. [batch, H, W, anchors per location, depth]
# where depth is [x, y, log(w), log(h)]
x = KL.Conv2D(anchors_per_location * 4, (1, 1), padding="valid",
activation='linear', name='rpn_bbox_pred')(shared)
# Reshape to [batch, anchors, 4]
rpn_bbox = KL.Lambda(lambda t: tf.reshape(t, [tf.shape(t)[0], -1, 4]))(x)
return [rpn_class_logits, rpn_probs, rpn_bbox]然後讓FPN網路生成的 rpn_feature_maps = [P2, P3, P4, P5, P6],依次通過RPN網路,獲得對應的輸出[“rpn_class_logits”, “rpn_class”, “rpn_bbox”],並把對應的結果有序地整合在一起
# Loop through pyramid layers
layer_outputs = [] # list of lists
for p in rpn_feature_maps:
layer_outputs.append(rpn([p]))
# Concatenate layer outputs
# Convert from list of lists of level outputs to list of lists
# of outputs across levels.
# e.g. [[a1, b1, c1], [a2, b2, c2]] => [[a1, a2], [b1, b2], [c1, c2]]
output_names = ["rpn_class_logits", "rpn_class", "rpn_bbox"]
outputs = list(zip(*layer_outputs))
outputs = [KL.Concatenate(axis=1, name=n)(list(o))
for o, n in zip(outputs, output_names)]
rpn_class_logits, rpn_class, rpn_bbox = outputs1.4 ProposalLayer 層
proposals簡介:篩選後的anchor(擁有更多目標前景,anchor更加接近target_box)
生成的proposal並非越多越好,因而設定了閾值proposal_count ,關於非極大值抑制NMS,可以參考:非極大值抑制的幾種實現
# Generate proposals
# Proposals are [batch, N, (y1, x1, y2, x2)] in normalized coordinates
# and zero padded.
proposal_count = config.POST_NMS_ROIS_TRAINING if mode == "training"\
else config.POST_NMS_ROIS_INFERENCE
rpn_rois = ProposalLayer(
proposal_count=proposal_count,
nms_threshold=config.RPN_NMS_THRESHOLD,
name="ROI",
config=config)([rpn_class, rpn_bbox, anchors])然後進入到自定義的層ProposalLayer,其接受的引數有3個:
rpn_class:所有畫素點BG/FG的概率值。
rpn_bbox:所有畫素點對應anchor上的4個偏移值[dy, dx, log(dh), log(dw)]。
anchors:預先生成的有序anchor列表,注意這裡有序表示feature_map上畫素點生成的anchor以及該畫素點生成的rpn_class和rpn_bbox是對應的(這樣理解對?)。
最終ProposalLayer會返回一個邊框修正後及mns過濾的anchor集合(稱為roi或proposal),至此已經完成了目標的檢測
class ProposalLayer(KE.Layer):
"""Receives anchor scores and selects a subset to pass as proposals
to the second stage. Filtering is done based on anchor scores and
non-max suppression to remove overlaps. It also applies bounding
box refinement deltas to anchors.
Inputs:
rpn_probs: [batch, anchors, (bg prob, fg prob)]
rpn_bbox: [batch, anchors, (dy, dx, log(dh), log(dw))]
anchors: [batch, (y1, x1, y2, x2)] anchors in normalized coordinates
Returns:
Proposals in normalized coordinates [batch, rois, (y1, x1, y2, x2)]
"""
def __init__(self, proposal_count, nms_threshold, config=None, **kwargs):
super(ProposalLayer, self).__init__(**kwargs)
self.config = config
self.proposal_count = proposal_count
self.nms_threshold = nms_threshold
def call(self, inputs):
# Box Scores. Use the foreground class confidence. [Batch, num_rois, 1]
scores = inputs[0][:, :, 1]
# Box deltas [batch, num_rois, 4]
deltas = inputs[1]
deltas = deltas * np.reshape(self.config.RPN_BBOX_STD_DEV, [1, 1, 4])
# Anchors
anchors = inputs[2]
# Improve performance by trimming to top anchors by score
# and doing the rest on the smaller subset.
pre_nms_limit = tf.minimum(6000, tf.shape(anchors)[1])
ix = tf.nn.top_k(scores, pre_nms_limit, sorted=True,
name="top_anchors").indices
scores = utils.batch_slice([scores, ix], lambda x, y: tf.gather(x, y),
self.config.IMAGES_PER_GPU)
deltas = utils.batch_slice([deltas, ix], lambda x, y: tf.gather(x, y),
self.config.IMAGES_PER_GPU)
pre_nms_anchors = utils.batch_slice([anchors, ix], lambda a, x: tf.gather(a, x),
self.config.IMAGES_PER_GPU,
names=["pre_nms_anchors"])
# Apply deltas to anchors to get refined anchors.
# [batch, N, (y1, x1, y2, x2)]
boxes = utils.batch_slice([pre_nms_anchors, deltas],
lambda x, y: apply_box_deltas_graph(x, y),
self.config.IMAGES_PER_GPU,
names=["refined_anchors"])
#normalized coordinates就是對應原圖的百分比座標
#下面的作用:防止修正後的anchor座標超出了邊界即0<=x,y<=1
# Clip to image boundaries. Since we're in normalized coordinates,
# clip to 0..1 range. [batch, N, (y1, x1, y2, x2)]
window = np.array([0, 0, 1, 1], dtype=np.float32)
boxes = utils.batch_slice(boxes,
lambda x: clip_boxes_graph(x, window),
self.config.IMAGES_PER_GPU,
names=["refined_anchors_clipped"])
# Filter out small boxes
# According to Xinlei Chen's paper, this reduces detection accuracy
# for small objects, so we're skipping it.
# Non-max suppression
def nms(boxes, scores):
indices = tf.image.non_max_suppression(
boxes, scores, self.proposal_count,
self.nms_threshold, name="rpn_non_max_suppression")
proposals = tf.gather(boxes, indices)
# Pad if needed
padding = tf.maximum(self.proposal_count - tf.shape(proposals)[0], 0)
#不足閾值大小則底部補0來填充
proposals = tf.pad(proposals, [(0, padding), (0, 0)])
return proposals
proposals = utils.batch_slice([boxes, scores], nms,
self.config.IMAGES_PER_GPU)
return proposals
def compute_output_shape(self, input_shape):
return (None, self.proposal_count, 4)1.5DetectionTargetLayer層
# Generate detection targets
# Subsamples proposals and generates target outputs for training
# Note that proposal class IDs, gt_boxes, and gt_masks are zero
# padded. Equally, returned rois and targets are zero padded.
#target_rois即上面proposal_layer的rpn_rois輸出(通常會用rpn網路)
rois, target_class_ids, target_bbox, target_mask =\
DetectionTargetLayer(config, name="proposal_targets")([
target_rois, input_gt_class_ids, gt_boxes, input_gt_masks])在其類中,主要關注call部分
class DetectionTargetLayer(KE.Layer):
"""Subsamples proposals and generates target box refinement, class_ids,
and masks for each.
Inputs:
proposals: [batch, N, (y1, x1, y2, x2)] in normalized coordinates. Might
be zero padded if there are not enough proposals.
gt_class_ids: [batch, MAX_GT_INSTANCES] Integer class IDs.
gt_boxes: [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)] in normalized
coordinates.
gt_masks: [batch, height, width, MAX_GT_INSTANCES] of boolean type
Returns: Target ROIs and corresponding class IDs, bounding box shifts,
and masks.
rois: [batch, TRAIN_ROIS_PER_IMAGE, (y1, x1, y2, x2)] in normalized
coordinates
target_class_ids: [batch, TRAIN_ROIS_PER_IMAGE]. Integer class IDs.
target_deltas: [batch, TRAIN_ROIS_PER_IMAGE, NUM_CLASSES,
(dy, dx, log(dh), log(dw), class_id)]
Class-specific bbox refinements.
target_mask: [batch, TRAIN_ROIS_PER_IMAGE, height, width)
Masks cropped to bbox boundaries and resized to neural
network output size.
Note: Returned arrays might be zero padded if not enough target ROIs."""
def call(self, inputs):
proposals = inputs[0]
gt_class_ids = inputs[1]
gt_boxes = inputs[2]
gt_masks = inputs[3]
# Slice the batch and run a graph for each slice
# TODO: Rename target_bbox to target_deltas for clarity
names = ["rois", "target_class_ids", "target_bbox", "target_mask"]
outputs = utils.batch_slice(
[proposals, gt_class_ids, gt_boxes, gt_masks],
lambda w, x, y, z: detection_targets_graph(
w, x, y, z, self.config),
self.config.IMAGES_PER_GPU, names=names)
return outputsdetection_targets_graph函式負責處理輸入的[proposals, gt_class_ids, gt_boxes, gt_masks]
程式碼有點長,首先計算proposals和gt_boxes的覆蓋度矩陣proposals*gt_boxes,然後獲得每個proposals一個與gt_boxes最大覆蓋度值roi_iou_max,如果roi_iou_max>0.5,則認為該proposals是 positive_roi,最後再把對應gt_box分配給對應的positive_roi並進行框體微調獲得對應偏移。最終返回的rois包含positive_roi和negative_roi。
def detection_targets_graph(proposals, gt_class_ids, gt_boxes, gt_masks, config):
"""Generates detection targets for one image. Subsamples proposals and
generates target class IDs, bounding box deltas, and masks for each.
Inputs:
proposals: [N, (y1, x1, y2, x2)] in normalized coordinates. Might
be zero padded if there are not enough proposals.
gt_class_ids: [MAX_GT_INSTANCES] int class IDs
gt_boxes: [MAX_GT_INSTANCES, (y1, x1, y2, x2)] in normalized coordinates.
gt_masks: [height, width, MAX_GT_INSTANCES] of boolean type.
Returns: Target ROIs and corresponding class IDs, bounding box shifts,
and masks.
rois: [TRAIN_ROIS_PER_IMAGE, (y1, x1, y2, x2)] in normalized coordinates
class_ids: [TRAIN_ROIS_PER_IMAGE]. Integer class IDs. Zero padded.
deltas: [TRAIN_ROIS_PER_IMAGE, NUM_CLASSES, (dy, dx, log(dh), log(dw))]
Class-specific bbox refinements.
masks: [TRAIN_ROIS_PER_IMAGE, height, width). Masks cropped to bbox
boundaries and resized to neural network output size.
Note: Returned arrays might be zero padded if not enough target ROIs.
"""
# Assertions
asserts = [
tf.Assert(tf.greater(tf.shape(proposals)[0], 0), [proposals],
name="roi_assertion"),
]
with tf.control_dependencies(asserts):
proposals = tf.identity(proposals)
# Remove zero padding
#去除padding的0
proposals, _ = trim_zeros_graph(proposals, name="trim_proposals")
gt_boxes, non_zeros = trim_zeros_graph(gt_boxes, name="trim_gt_boxes")
gt_class_ids = tf.boolean_mask(gt_class_ids, non_zeros,
name="trim_gt_class_ids")
gt_masks = tf.gather(gt_masks, tf.where(non_zeros)[:, 0], axis=2,
name="trim_gt_masks")
#這裡crowds沒看懂 gt_class_ids < 0 ??
# Handle COCO crowds
# A crowd box in COCO is a bounding box around several instances. Exclude
# them from training. A crowd box is given a negative class ID.
crowd_ix = tf.where(gt_class_ids < 0)[:, 0]
non_crowd_ix = tf.where(gt_class_ids > 0)[:, 0]
crowd_boxes = tf.gather(gt_boxes, crowd_ix)
crowd_masks = tf.gather(gt_masks, crowd_ix, axis=2)
gt_class_ids = tf.gather(gt_class_ids, non_crowd_ix)
gt_boxes = tf.gather(gt_boxes, non_crowd_ix)
gt_masks = tf.gather(gt_masks, non_crowd_ix, axis=2)
#計算proposals和gt_boxes的覆蓋度矩陣proposals*gt_boxes
# Compute overlaps matrix [proposals, gt_boxes]
overlaps = overlaps_graph(proposals, gt_boxes)
# Compute overlaps with crowd boxes [anchors, crowds]
crowd_overlaps = overlaps_graph(proposals, crowd_boxes)
crowd_iou_max = tf.reduce_max(crowd_overlaps, axis=1)
no_crowd_bool = (crowd_iou_max < 0.001)
# Determine postive and negative ROIs
#獲得proposals和gt_box最大的覆蓋度值[n_proposals,1]
roi_iou_max = tf.reduce_max(overlaps, axis=1)
# 1. Positive ROIs are those with >= 0.5 IoU with a GT box
#roi覆蓋度值>0.5則認為其是positive_roi bool[n_proposals,1]
positive_roi_bool = (roi_iou_max >= 0.5)
#獲取positive_roi的索引[filter_n_proposals,1]
positive_indices = tf.where(positive_roi_bool)[:, 0]
# 2. Negative ROIs are those with < 0.5 with every GT box. Skip crowds.
negative_indices = tf.where(tf.logical_and(roi_iou_max < 0.5, no_crowd_bool))[:, 0]
#對positive_roi和inegative_roi進行了取樣
# Subsample ROIs. Aim for 33% positive
# Positive ROIs
positive_count = int(config.TRAIN_ROIS_PER_IMAGE *
config.ROI_POSITIVE_RATIO)
positive_indices = tf.random_shuffle(positive_indices)[:positive_count]
positive_count = tf.shape(positive_indices)[0]
# Negative ROIs. Add enough to maintain positive:negative ratio.
r = 1.0 / config.ROI_POSITIVE_RATIO
negative_count = tf.cast(r * tf.cast(positive_count, tf.float32), tf.int32) - positive_count
negative_indices = tf.random_shuffle(negative_indices)[:negative_count]
# Gather selected ROIs
positive_rois = tf.gather(proposals, positive_indices)
negative_rois = tf.gather(proposals, negative_indices)
#把取樣後的positive_roi分配給gt_box
# Assign positive ROIs to GT boxes.
positive_overlaps = tf.gather(overlaps, positive_indices)
#每個positive_rois對應gt_box覆蓋度最大值的下標(即列下標)[filter_n_proposals,1]
roi_gt_box_assignment = tf.argmax(positive_overlaps, axis=1)
roi_gt_boxes = tf.gather(gt_boxes, roi_gt_box_assignment)
roi_gt_class_ids = tf.gather(gt_class_ids, roi_gt_box_assignment)
# Compute bbox refinement for positive ROIs
deltas = utils.box_refinement_graph(positive_rois, roi_gt_boxes)
deltas /= config.BBOX_STD_DEV
# Assign positive ROIs to GT masks
# Permute masks to [N, height, width, 1]
transposed_masks = tf.expand_dims(tf.transpose(gt_masks, [2, 0, 1]), -1)
# Pick the right mask for each ROI
roi_masks = tf.gather(transposed_masks, roi_gt_box_assignment)
# Compute mask targets....
# Append negative ROIs and pad bbox deltas and masks that
# are not used for negative ROIs with zeros.
rois = tf.concat([positive_rois, negative_rois], axis=0)
N = tf.shape(negative_rois)[0]
P = tf.maximum(config.TRAIN_ROIS_PER_IMAGE - tf.shape(rois)[0], 0)
rois = tf.pad(rois, [(0, P), (0, 0)])
roi_gt_boxes = tf.pad(roi_gt_boxes, [(0, N + P), (0, 0)])
roi_gt_class_ids = tf.pad(roi_gt_class_ids, [(0, N + P)])
deltas = tf.pad(deltas, [(0, N + P), (0, 0)])
masks = tf.pad(masks, [[0, N + P], (0, 0), (0, 0)])
#....
return rois, roi_gt_class_ids, deltas, masks1.6Network Heads
經過DetectionTargetLayer層生成了很多rois,但它們大小不一,這裡需要對其進行大小歸一處理,並和之前的FPN生成的feature_map聯絡起來。
# Network Heads
# TODO: verify that this handles zero padded ROIs
mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\
fpn_classifier_graph(rois, mrcnn_feature_maps, input_image_meta,
config.POOL_SIZE, config.NUM_CLASSES,
train_bn=config.TRAIN_BN)然後進入到fpn_classifier_graph函式,首先通過PyramidROIAlign層獲得rois固定pooling大小輸出,之後用了2個fc層特徵化了feature_map,和上面提及的RPN類似對類別進行分類,對4個座標點進行迴歸。
def fpn_classifier_graph(rois, feature_maps, image_meta,
pool_size, num_classes, train_bn=True):
"""Builds the computation graph of the feature pyramid network classifier
and regressor heads.
rois: [batch, num_rois, (y1, x1, y2, x2)] Proposal boxes in normalized
coordinates.
feature_maps: List of feature maps from diffent layers of the pyramid,
[P2, P3, P4, P5]. Each has a different resolution.
- image_meta: [batch, (meta data)] Image details. See compose_image_meta()
pool_size: The width of the square feature map generated from ROI Pooling.
num_classes: number of classes, which determines the depth of the results
train_bn: Boolean. Train or freeze Batch Norm layres
Returns:
logits: [N, NUM_CLASSES] classifier logits (before softmax)
probs: [N, NUM_CLASSES] classifier probabilities
bbox_deltas: [N, (dy, dx, log(dh), log(dw))] Deltas to apply to
proposal boxes
"""
# ROI Pooling
# Shape: [batch, num_boxes, pool_height, pool_width, channels]
x = PyramidROIAlign([pool_size, pool_size],
name="roi_align_classifier")([rois, image_meta] + feature_maps)
# Two 1024 FC layers (implemented with Conv2D for consistency)
x = KL.TimeDistributed(KL.Conv2D(1024, (pool_size, pool_size), padding="valid"),
name="mrcnn_class_conv1")(x)
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_class_bn1')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.TimeDistributed(KL.Conv2D(1024, (1, 1)),
name="mrcnn_class_conv2")(x)
x = KL.TimeDistributed(BatchNorm(), name='mrcnn_class_bn2')(x, training=train_bn)
x = KL.Activation('relu')(x)
shared = KL.Lambda(lambda x: K.squeeze(K.squeeze(x, 3), 2),
name="pool_squeeze")(x)
# Classifier head
mrcnn_class_logits = KL.TimeDistributed(KL.Dense(num_classes),
name='mrcnn_class_logits')(shared)
mrcnn_probs = KL.TimeDistributed(KL.Activation("softmax"),
name="mrcnn_class")(mrcnn_class_logits)
# BBox head
# [batch, boxes, num_classes * (dy, dx, log(dh), log(dw))]
x = KL.TimeDistributed(KL.Dense(num_classes * 4, activation='linear'),
name='mrcnn_bbox_fc')(shared)
# Reshape to [batch, boxes, num_classes, (dy, dx, log(dh), log(dw))]
s = K.int_shape(x)
mrcnn_bbox = KL.Reshape((s[1], num_classes, 4), name="mrcnn_bbox")(x)
return mrcnn_class_logits, mrcnn_probs, mrcnn_bbox下面重點看下PyramidROIAlign
首先關注一個問題:目前獲得的rois(經RPN網路的長和寬大多都不一樣了)是通過FPN獲得的(P2-P5),P2-P5預設設定anchor的也不一樣,比如說(16,32,64,128,256),那生成的某個roi來自於哪個feature_map(P2-P5對應的featrue_map) ? 也就是說對應給定的roi,應該去哪個feature_map上做ROIAlign?因為之前生成anchor數目過多,沒有記錄其來自哪個feature_map,論文提出了一個近似的計算公式:(截圖來自於FPN網路原論文)
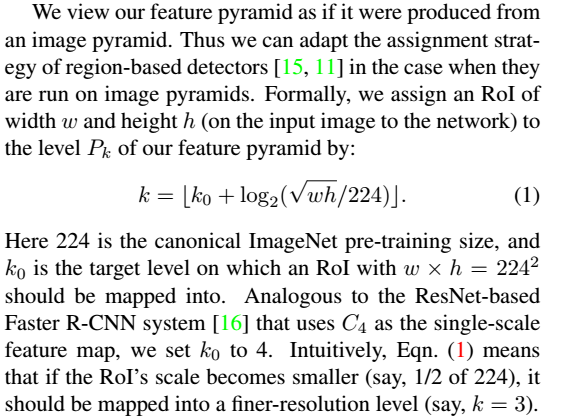
圖2
然後在看程式碼就清晰多了,至於roialign,程式碼直接呼叫了tf.image.crop_and_resize函式,這裡有個較好的roi_pooling博文:https://blog.deepsense.ai/region-of-interest-pooling-explained/
class PyramidROIAlign(KE.Layer):
"""Implements ROI Pooling on multiple levels of the feature pyramid.
Params:
- pool_shape: [height, width] of the output pooled regions. Usually [7, 7]
Inputs:
- boxes: [batch, num_boxes, (y1, x1, y2, x2)] in normalized
coordinates. Possibly padded with zeros if not enough
boxes to fill the array.
- image_meta: [batch, (meta data)] Image details. See compose_image_meta()
- Feature maps: List of feature maps from different levels of the pyramid.
Each is [batch, height, width, channels]
Output:
Pooled regions in the shape: [batch, num_boxes, height, width, channels].
The width and height are those specific in the pool_shape in the layer
constructor.
"""
def __init__(self, pool_shape, **kwargs):
super(PyramidROIAlign, self).__init__(**kwargs)
self.pool_shape = tuple(pool_shape)
def call(self, inputs):
# Crop boxes [batch, num_boxes, (y1, x1, y2, x2)] in normalized coords
boxes = inputs[0]
# Image meta
# Holds details about the image. See compose_image_meta()
image_meta = inputs[1]
# Feature Maps. List of feature maps from different level of the
# feature pyramid. Each is [batch, height, width, channels]
feature_maps = inputs[2:]
# Assign each ROI to a level in the pyramid based on the ROI area.
y1, x1, y2, x2 = tf.split(boxes, 4, axis=2)
h = y2 - y1
w = x2 - x1
# Use shape of first image. Images in a batch must have the same size.
image_shape = parse_image_meta_graph(image_meta)['image_shape'][0]
# Equation 1 in the Feature Pyramid Networks paper. Account for
# the fact that our coordinates are normalized here.
# e.g. a 224x224 ROI (in pixels) maps to P4
image_area = tf.cast(image_shape[0] * image_shape[1], tf.float32)
roi_level = log2_graph(tf.sqrt(h * w) / (224.0 / tf.sqrt(image_area)))
roi_level = tf.minimum(5, tf.maximum(
2, 4 + tf.cast(tf.round(roi_level), tf.int32)))
roi_level = tf.squeeze(roi_level, 2)
# Loop through levels and apply ROI pooling to each. P2 to P5.
pooled = []
box_to_level = []
for i, level in enumerate(range(2, 6)):
ix = tf.where(tf.equal(roi_level, level))
level_boxes = tf.gather_nd(boxes, ix)
# Box indicies for crop_and_resize.
box_indices = tf.cast(ix[:, 0], tf.int32)
# Keep track of which box is mapped to which level
box_to_level.append(ix)
# Stop gradient propogation to ROI proposals
level_boxes = tf.stop_gradient(level_boxes)
box_indices = tf.stop_gradient(box_indices)
# Crop and Resize
# From Mask R-CNN paper: "We sample four regular locations, so
# that we can evaluate either max or average pooling. In fact,
# interpolating only a single value at each bin center (without
# pooling) is nearly as effective."
#
# Here we use the simplified approach of a single value per bin,
# which is how it's done in tf.crop_and_resize()
# Result: [batch * num_boxes, pool_height, pool_width, channels]
pooled.append(tf.image.crop_and_resize(
feature_maps[i], level_boxes, box_indices, self.pool_shape,
method="bilinear"))
# Pack pooled features into one tensor
pooled = tf.concat(pooled, axis=0)
#.....1.7build_fpn_mask_graph
在roi的基礎上用了一個簡易版的FCN網路進行mask (簡易版?FPN網路也具有不同層次的抽象特徵)
mrcnn_mask = build_fpn_mask_graph(rois, mrcnn_feature_maps,
input_image_meta,
config.MASK_POOL_SIZE,
config.NUM_CLASSES,
train_bn=config.TRAIN_BN)
def build_fpn_mask_graph(rois, feature_maps, image_meta,
pool_size, num_classes, train_bn=True):
"""Builds the computation graph of the mask head of Feature Pyramid Network.
rois: [batch, num_rois, (y1, x1, y2, x2)] Proposal boxes in normalized
coordinates.
feature_maps: List of feature maps from diffent layers of the pyramid,
[P2, P3, P4, P5]. Each has a different resolution.
image_meta: [batch, (meta data)] Image details. See compose_image_meta()
pool_size: The width of the square feature map generated from ROI Pooling.
num_classes: number of classes, which determines the depth of the results
train_bn: Boolean. Train or freeze Batch Norm layres
Returns: Masks [batch, roi_count, height, width, num_classes]
"""
# ROI Pooling
# Shape: [batch, boxes, pool_height, pool_width, channels]
x = PyramidROIAlign([pool_size, pool_size],
name="roi_align_mask")([rois, image_meta] + feature_maps)
# Conv layers
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),
name="mrcnn_mask_conv1")(x)
x = KL.TimeDistributed(BatchNorm(),
name='mrcnn_mask_bn1')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),
name="mrcnn_mask_conv2")(x)
x = KL.TimeDistributed(BatchNorm(),
name='mrcnn_mask_bn2')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),
name="mrcnn_mask_conv3")(x)
x = KL.TimeDistributed(BatchNorm(),
name='mrcnn_mask_bn3')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.TimeDistributed(KL.Conv2D(256, (3, 3), padding="same"),
name="mrcnn_mask_conv4")(x)
x = KL.TimeDistributed(BatchNorm(),
name='mrcnn_mask_bn4')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.TimeDistributed(KL.Conv2DTranspose(256, (2, 2), strides=2, activation="relu"),
name="mrcnn_mask_deconv")(x)
x = KL.TimeDistributed(KL.Conv2D(num_classes, (1, 1), strides=1, activation="sigmoid"),
name="mrcnn_mask")(x)
return x前面4個卷積feature_map_size儲存不變,然後接了一個逆卷積Conv2DTranspose,feature_map_size變成了之前的2倍(類似於上取樣),這和配置檔案中的引數是對應:
MASK_POOL_SIZE = 14
# Shape of output mask
# To change this you also need to change the neural network mask branch
MASK_SHAPE = [28, 28]1.8 loss+model
下面是loss和keras模型生成的部分
# Losses
rpn_class_loss = KL.Lambda(lambda x: rpn_class_loss_graph(*x), name="rpn_class_loss")(
[input_rpn_match, rpn_class_logits])
rpn_bbox_loss = KL.Lambda(lambda x: rpn_bbox_loss_graph(config, *x), name="rpn_bbox_loss")(
[input_rpn_bbox, input_rpn_match, rpn_bbox])
class_loss = KL.Lambda(lambda x: mrcnn_class_loss_graph(*x), name="mrcnn_class_loss")(
[target_class_ids, mrcnn_class_logits, active_class_ids])
bbox_loss = KL.Lambda(lambda x: mrcnn_bbox_loss_graph(*x), name="mrcnn_bbox_loss")(
[target_bbox, target_class_ids, mrcnn_bbox])
mask_loss = KL.Lambda(lambda x: mrcnn_mask_loss_graph(*x), name="mrcnn_mask_loss")(
[target_mask, target_class_ids, mrcnn_mask])
# Model
inputs = [input_image, input_image_meta,
input_rpn_match, input_rpn_bbox, input_gt_class_ids, input_gt_boxes, input_gt_masks]
if not config.USE_RPN_ROIS:
inputs.append(input_rois)
outputs = [rpn_class_logits, rpn_class, rpn_bbox,
mrcnn_class_logits, mrcnn_class, mrcnn_bbox, mrcnn_mask,
rpn_rois, output_rois,
rpn_class_loss, rpn_bbox_loss, class_loss, bbox_loss, mask_loss]
model = KM.Model(inputs, outputs, name='mask_rcnn')Summary:
1.由FPN網路獲得feature_map[P2, P3, P4, P5, P6],並獲取其對應下的anchor集合
2.feature_map[P2-P6]依次通過RNP網路,獲得對應的[“rpn_class_logits”, “rpn_class”, “rpn_bbox”],這裡對座標進行了第1次線性迴歸。
3.ProposalLayer把RNP網路生成的[“rpn_class”, “rpn_bbox”]和Anchor對應起來,對前景概率FG降序並取前N(N=6000)個對應的indics,並由此indics獲得對應的rpn_bbox(deltas)和anchors(pre_nms_anchors),然後利用deltas對pre_nms_anchors進行座標修正。最後用極大值抑制演算法對修正後的anchors進行過濾獲得rois
4.DetectionTargetLayer根據roi和gt_box的iou(交併比)劃分positive_roi和negative_roi.取其比例1:3,最終返回
5.fpn_classifier_graph把roi和feature_map[P2-P6]聯絡起來,首先把roi在對應的feature_map進行roi_pooling獲得固定大小的feature_map(7*7),然後在feature_map(7*7)的基礎上進行類別分類和第2次座標線性迴歸