
VVC/VTM幀內編碼主要流程圖與劃分函式
(1)VTM中幀內編碼程式的主要流程如下,進行劃分的主要函式是XCompressCU與xCheckModeSpilt

(2)xCompressCU函式的主體部分如下。對於幀內編碼來說,在xCompressCU函式中主要進行的就是一個模式的分割以及幀內代價的計算,通常在填充分割模式時都會先填充ETM_INTRA模式,這時會進行幀內預測方向以及代價的計算,之後會按照currTestMode(四叉樹、水平、垂直、二叉樹、三叉樹)模式進行劃分,然後進入到xCheckModeSplit函式

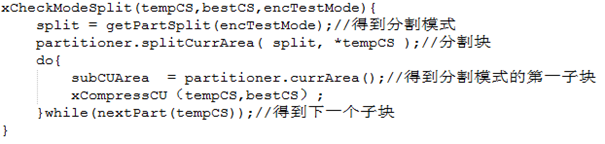
(3xCheckModeSplit函式的主體部分如下,進入到此函式中主要是控制對每一個子塊進行劃分。
相關推薦
VVC/VTM幀內編碼主要流程圖與劃分函式
(1)VTM中幀內編碼程式的主要流程如下,進行劃分的主要函式是XCompressCU與xCheckModeSpilt (2)xCompressCU函式的主體部分如下。對於幀內編碼來說,在xCompressCU函式中主要進行的就是一個模式的分割以及幀內代價的計算,通常在填充分割模式時都會先填充ETM_IN
H264幀內編碼與幀間編碼
晚上沒事幹,無聊,所以想寫點什麼。 為了達到節約空間的目的,視訊影象都是經過編碼,然後用於各種不同的場合,特別是網路傳輸,因為頻寬的限制,為了更好的傳輸資料,必須對視訊進行壓縮處理。而目前最流行的當屬H264了。 經過H264壓縮的視訊,可分為I、B、P三種不同的幀。其中
【HEVC學習與研究】42、HEVC幀內編碼的原理和實現(下)
4、編碼幀內預測模式 大量增加可選擇的預測模式可以提供更高的編碼效率,同時要求編碼預測模式有更加高效的方法降低更多模式帶來的負擔。與H.264採用一個最可能模式不同的是,對於亮度分量,三個最可能模式用於預測實際的幀內預測模式。同時,也考慮了三個最可能模式中的冗餘資訊,重複的
【HEVC學習與研究】39、HEVC幀內編碼的原理和實現(上)
【前面N篇博文都講了一些HEVC幀內預測的程式碼結構和簡單的方法,但是尚未對整體的演算法和實現做一個比較完整的描述。本篇藉助參考文獻《High Efficiency Video Coding (HEVC) -- Algorithms and Architectures》的
HEVC函式入門(2)——幀內編碼一個CU
這裡依然整理自http://blog.csdn.net/shaqoneal/article/details/37500715 且閱讀CU這部分主要對我而言是為了QP。另外一個方向是Tile不要迷失啦!!! 提醒我自己看http://blog.csdn.net
H.266/VVC幀內預測框架
本人是西電研一的一名普通學生,現在在通院信科所多媒體通訊實驗室,主要研究方向是視訊編碼標準H.266/VVC。 如很多剛上研同學一樣,入學以來經歷了迷茫、對科研方向無從下手等問題。兩個月來,在理清視訊編碼結構後,終於漸漸理解並敢於修改VVC的程式碼。準備在部落格這個平臺上記錄自己的
VVC程式碼 BMS 幀內預測學習之四:xFillReferenceSamples()
xFillReferenceSamples()函式是參考畫素的獲取過程。 主要步驟: 1、分析臨近的畫素是否可獲取 2、進行參考樣本的填充:若臨近的畫素全部可獲取,則賦值;全部不可獲取,則賦預設值;若部分可獲取,則對可獲取的賦對應的值,不可獲取的用預設值填充。
VVC程式碼 BMS 幀內預測學習之六:Planar、DC及角度模式下預測值的計算
1、Planar模式,函式xPredIntraPlanar(): 預測畫素是水平、垂直兩個方向上4個參考畫素的平均值。 left, top為預測畫素正左,正上方參考畫素值; right = leftColumn[height]- left, bottom =
ffmpeg libx264視訊編碼過程中幀內預測模式a->i_predict4x4[idx]的獲取問題
analyse.c的函式static void x264_mb_analyse_intra(...)中有這麼一段程式碼: if( i_best > 0 ) //註釋來自leixiaohua大神 {
33、編碼一個CU(幀內部分)2、幀內預測各種模式的實現
HEVC中一共定義了35中幀內編碼預測模式,編號分別以0-34定義。其中模式0定義為平面模式(INTRA_PLANAR),模式1定義為均值模式(INTRA_DC),模式2~34定義為角度預測模式(INTRA_ANGULAR2~INTRA_ANGULAR34),分別代表了不同
H.264預測編碼之幀內預測
預測編碼是視訊壓縮中最基本的編碼工具,常見的預測編碼為幀間預測和幀內預測。 視訊編碼中,主要的冗餘資訊是時間冗餘,其次是空間冗餘,視訊編碼通過幀間預測消除時間冗餘,通過幀內預測消除空間冗餘。接下來說說
x265幀內一個CU的編碼過程(版本2.8)
一. 幀內CU、PU、TU: 1. CU:編碼單元,在幀內只有 64x64-8x8; 2. PU:預測單元,幀內有2Nx2N、NxN兩種劃分方式,其中2Nx2N對應所屬編碼單元CU的尺寸,而NxN只存在於8x8的CU中, 因為對於其他尺寸的
內存動態分配與釋放
ont 分配 rgb sig 地址 占用 註意 是把 post 內存的動態分配須要使用函數malloc。函數free和運算符sizeof來實現。函數malloc的原型是: Void* malloc(unsigned int size); 函數malloc的作用是在內存中
2017-06-28(passwd 主要組與附屬組 gpasswd newgrp)
鎖定 同時 tro 名稱 strong 刪除 span new gpa passwd passwd -l 用戶名 (鎖定用戶) passwd -u 用戶名 (解鎖用戶) passwd -d 用戶名 (清楚用戶密碼) 主要組與附屬組 一個用戶可以同
內核模板安裝與卸載
log archive 模板 內核 .net code tail 卸載 www http://www.linuxidc.com/Linux/2016-03/129476.htm http://blog.csdn.net/crazycoder8848/article/deta
iOS 內購集成與遇到的坑
rec 點擊 ans 流程 我們 銀行卡 自己的 http 固定格式 1.集成 集成內購的流程網上還是有很多的,在這我就不班門弄斧了。 附上幾個比較好的鏈接: (1)http://www.jianshu.com/p/f7bff61e0b31 這個寫的相當詳細,裏面也有一些細
對象內存布局與訪問
-s size 布局 數組長度 引用 修改 hot 記錄 理解 對象內存布局 在HotSpot虛擬機中,對象在內存中存儲的布局可以分為3塊區域:對象頭(Header)、實例數據(Instance Data)和對齊填充(Padding)。 對象頭 HotSpot虛擬機的
NoSQL數據庫:Redis內存使用優化與存儲
一行 名稱 大小 所有 key 多少 計算 包括 最終 Redis常用數據類型 Redis最為常用的數據類型主要有以下五種: ●String ●Hash ●List ●Set ●Sorted set 在具體描述這幾種數據類型之前,我們先通過一張圖
Linux 內核中 likely 與 unlikely 的宏定義解析
帶來 內核版本 sta don 等價 ddc 編譯 views lines 在 2.6 內核中,隨處能夠見到 likely() 和 unlikely() 的身影,那麽為什麽要用它們?它們之間有什麽差別? 首先要明白: if(likel
python之路——內置函數與匿名函數
align items 空字符串 rac strip 默認值 name [0 所在 內置函數 python裏的內置函數。截止到python版本3.6.2,現在python一共為我們提供了68個內置函數。它們就是python提供給你直接可以拿來使用的所有函數。這些函