
資料結構之最短路徑
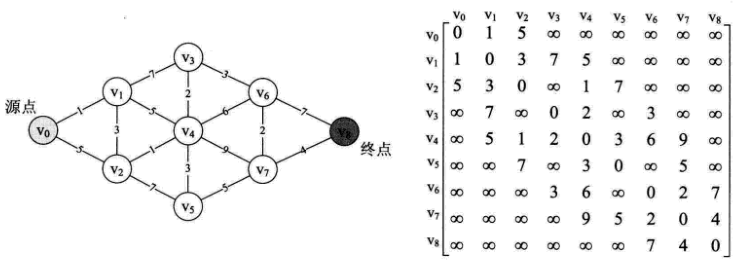
對於網圖來說,最短路徑,是指兩頂點之間經過的邊上權值之和最少的路徑,並且我們稱路徑上的第一個頂點是源點,最後一個頂點是終點。
迪傑斯特拉(Dijkstra)演算法
這是一個按路徑長度遞增的次序產生最短路徑的演算法。它的思路大體是這樣的:並不是一下子就求出v0到v8的最短路徑,而是一步步求出它們之間頂點的最短路徑,過程中都是基於已經求出的最短路徑的基礎上,求得更遠頂點的最短路徑,最終得到你要的結果。
#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include 執行結果為:
最短路徑倒序如下:
v0 - v1 :
v0 - v2 : 1
v0 - v3 : 4 2 1
v0 - v4 : 2 1
v0 - v5 : 4 2 1
v0 - v6 : 3 4 2 1
v0 - v7 : 6 3 4 2 1
v0 - v8 : 7 6 3 4 2 1
源點到各頂點的最短路徑長度為:
v0 - v1 : 1
v0 - v2 : 4
v0 - v3 : 7
v0 - v4 : 5
v0 - v5 : 8
v0 - v6 : 10
v0 - v7 : 12
v0 - v8 : 16
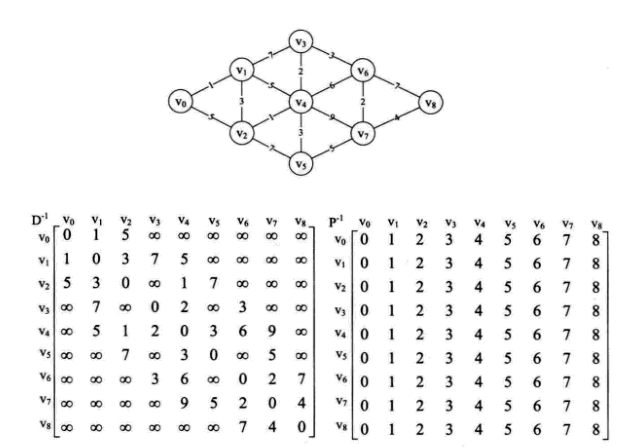
弗洛伊德(Floyd)演算法
先定義兩個二維陣列
和
,
代表頂點到頂點的最短路徑權值和的矩陣,初始化為
,其實就是初始的圖的鄰接矩陣。將
命名為
,初始化為圖中矩陣。
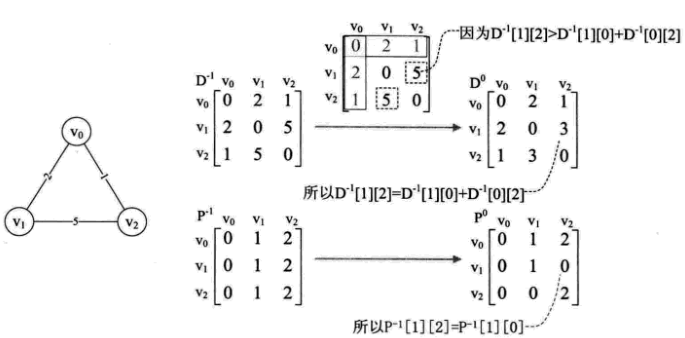
首先分析所有的頂點經過v0後到達另一個頂點的最短路徑。因為只有三個頂點,因此需要檢視v1->v0->v2,得到路徑為3。而v1->v2權值為5,所以就有了
矩陣,同時修改
矩陣。接下來,再在
的基礎上計算經過v1和v2的後到達另一個頂點的最短路徑,得到
。
#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include "time.h"
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXEDGE 20
#define MAXVEX 20
#define INFINITY 65535
typedef int Status; /* Status是函式的型別,其值是函式結果狀態程式碼,如OK等 */
typedef struct
{
int vexs[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes, numEdges;
}MGraph;
typedef int Patharc[MAXVEX][MAXVEX];
typedef int ShortPathTable[MAXVEX][MAXVEX];
/* 構件圖 */
void CreateMGraph(MGraph *G)
{
int i, j;
/* printf("請輸入邊數和頂點數:"); */
G->numEdges = 16;
G->numVertexes = 9;
for (i = 0; i < G->numVertexes; i++)/* 初始化圖 */
{
G->vexs[i] = i;
}
for (i = 0; i < G->numVertexes; i++)/* 初始化圖 */
{
for (j = 0; j < G->numVertexes; j++)
{
if (i == j)
G->arc[i][j] = 0;
else
G->arc[i][j] = G->arc[j][i] = INFINITY;
}
}
G->arc[0][1] = 1;
G->arc[0][2] = 5;
G->arc[1][2] = 3;
G->arc[1][3] = 7;
G->arc[1][4] = 5;
G->arc[2][4] = 1;
G->arc[2][5] = 7;
G->arc[3][4] = 2;
G->arc[3][6] = 3;
G->arc[4][5] = 3;
G->arc[4][6] = 6;
G->arc[4][7] = 9;
G->arc[5][7] = 5;
G->arc[6][7] = 2;
G->arc[6][8] = 7;
G->arc[7][8] = 4;
for (i = 0; i < G->numVertexes; i++)
{
for (j = i; j < G->numVertexes; j++)
{
G->arc[j][i] = G->arc[i][j];
}
}
}
/* Floyd演算法,求網圖G中各頂點v到其餘頂點w的最短路徑P[v][w]及帶權長度D[v][w]。 */
void ShortestPath_Floyd(MGraph G, Patharc *P, ShortPathTable *D)
{
int v, w, k;
for (v = 0; v<G.numVertexes; ++v) /* 初始化D與P */
{
for (w = 0; w<G.numVertexes; ++w)
{
(*D)[v][w] = G.arc[v][w]; /* D[v][w]值即為對應點間的權值 */
(*P)[v][w] = w; /* 初始化P */
}
}
for (k = 0; k<G.numVertexes; ++k)
{
for (v = 0; v<G.numVertexes; ++v)
{
for (w = 0; w<G.numVertexes; ++w)
{
if ((*D)[v][w]>(*D)[v][k] + (*D)[k][w])
{/* 如果經過下標為k頂點路徑比原兩點間路徑更短 */
(*D)[v][w] = (*D)[v][k] + (*D)[k][w];/* 將當前兩點間權值設為更小的一個 */
(*P)[v][w] = (*P)[v][k];/* 路徑設定為經過下標為k的頂點 */
}
}
}
}
}
int main(void)
{
int v, w, k;
MGraph G;
Patharc P;
ShortPathTable D; /* 求某點到其餘各點的最短路徑 */
CreateMGraph(
相關推薦
資料結構之最短路徑
對於網圖來說,最短路徑,是指兩頂點之間經過的邊上權值之和最少的路徑,並且我們稱路徑上的第一個頂點是源點,最後一個頂點是終點。
迪傑斯特拉(Dijkstra)演算法
這是一個按路徑長度遞增的次序產生最短路徑的演算法。它的思路大體是這樣的:並不是一下子就求出v0到v8的最短路徑,而是
資料結構之最短路徑Dijkdtra演算法
/*
* Dijkstra最短路徑。
* 即,統計圖(G)中"頂點vs"到其它各個頂點的最短路徑。
*
* 引數說明:
* G -- 圖
* vs -- 起始頂點(start vertex)。即計算"頂點vs"到其它頂點的最短路徑。
* prev -- 前驅
Java資料結構----圖--最短路徑解法Dijkstra演算法和Floyd演算法
最短路徑—Dijkstra演算法和Floyd演算法
1、Dijkstra演算法
1.1、定義概覽
Dijkstra(迪傑斯特拉)演算法是典型的單源最短路徑演算法,用於計算一個節點到其他所有節點的最短路徑。主要特點是以起始點為中心向外層層擴充套件,直到擴充套件到終點為止。Di
最短路徑之最短路徑問題
導入 n+2 lan ble 一行 memset ems esp php [提交] [狀態] [討論版] [命題人:外部導入]
題目描述
平面上有n個點(n<=100),每個點的坐標均在-10000~10000之間。其中的一些點之間有連線。 若有連線,
資料結構之最大子列和
#include <stdlib.h>
#include <stdio.h>
int MaxSubseqSum(int a[],int N)
{
int i,ThisSum = 0,MaxSum = 0;
&nb
資料結構之最小生成樹
一、Prim演算法的實現
待補充、、、、
二、Kruskal演算法的實現:
#include<iostream>
#include<algorithm>
using namespace std;
#define MaxInt 32767//表示無
SDUT OJ 2143 圖結構練習——最短路徑
圖結構練習——最短路徑
Time Limit: 1000MS Memory limit: 65536K
題目描述
給定一個帶權無向圖,求節點1到節點n的最短路徑。
輸入
圖結構練習——最短路徑(Dijkstra演算法)
think:
1注意重複邊的覆蓋
2注意map陣列的初始化
3注意dist陣列的初始化
圖結構練習——最短路徑
Time Limit: 1000MS Memory Limit: 65536KB
Problem Description
給定一個
poj 1273 最大流之最短路徑增廣法(EK)
Drainage Ditches
Time Limit: 1000MS
Memory Limit: 10000K
Total Submissions: 71182
Accepted: 27694
Description
Every time it rains
貪心演算法之最短路徑問題(Dijkstra演算法)
1、問題
一個求單源最短路徑的問題。給定有向帶權圖 G =(V, E ),
其中每條邊的權是非負實數。此外,給定 V 中的一個頂點,
稱為源點。現在要計算從源到所有其他各頂點的最短路徑長
度,這裡路徑長度指路上各邊的權之和。
2、分析
3、程式碼實現
1、普通C
SDUT 2143 圖結構練習——最短路徑
//Flyod
#include <bits/stdc++.h>
#define INF 0x3f3f3f3f
using namespace std;
int Edge[10010][10010];
int main()
{
int n, m;
圖結構練習——最短路徑(Dijkstra)
圖結構練習——最短路徑
Time Limit: 1000 ms Memory Limit: 65536 KiB
Problem Description
給定一個帶權無向圖,求節點1到節點n的最短路徑。
Input
輸入包含多組資料,格式如下。
第一行包
圖之最短路徑
目前求最短路徑的演算法很多,下面2種是基本不再使用,但卻是經典的路徑演算法。其他路徑演算法有啟發式演算法A*,D*,還有樹形的RRT, RRT*等。
1. Dijkstra演算法
a. 基本思想:求帶權有向圖中某個源點到其他各頂點的最短路徑,
**圖結構練習——最短路徑**
圖結構練習——最短路徑
Time Limit: 1000 ms Memory Limit: 65536 KiB
Problem Description
給定一個帶權無向圖,求節點1到節點n的最短路徑。
Input
輸入包含多組資料,格式如下。
第
資料結構基礎之圖(下):最短路徑
轉自:http://www.cnblogs.com/edisonchou/p/4691020.html
圖(下):最短路徑
圖的最重要的應用之一就是在交通運輸和通訊網路中尋找最短路徑。例如在交通網路中經常會遇到這樣的問題:兩地之間是否有公路可通;在有多條公路可通的情況下,哪
資料結構與演算法--最短路徑之Floyd演算法
一、解決單源最短路徑問題的Dijkstra演算法
我們知道Dijkstra演算法只能解決單源最短路徑問題,且要求邊上的權重都是非負的。那麼有沒有辦法解決任意起點到任意頂點的最短路徑問題呢?如果用Dijkstra演算法,可以這樣做:
Dijkstra[]
資料結構之(圖最短路徑之)Dijkstra(迪傑斯特拉)演算法
1)常用的圖最短路徑的演算法有兩個:Dijkstra演算法和Floyd演算法;
2)Dijkstra演算法適用於求圖中兩節點之間最短路徑,Floyd演算法適於求圖中任意兩節點間;
3)兩種演算法的主要思想是動態規劃,而Dijkstra演算法設計比較巧妙的是:在求源節點到終結
資料結構圖之三-----------最短路徑
最短路徑?別亂想哈,其實就是字面意思,一個帶邊值的圖中從某一個頂點到另外一個頂點的最短路徑。
官方定義:對於內網圖而言,最短路徑是指兩頂點之間經過的邊上權值之和最小的路徑。
並且我們稱路徑上的第一個頂點為源點,最後一個頂點為終點。
由於非內網圖沒有邊上的權值,所謂的最短路徑其實是指兩頂點之間經過的邊
資料結構圖之三(最短路徑--迪傑斯特拉演算法)
1 #include <iostream>
2 #include "SeqList.h"
3 #include "Stack.h"
4 #include <iomanip>
5 using namespace std;
6
7 #defin
資料結構之(圖最短路徑之)Floyd(弗洛伊德)演算法
1)弗洛伊德演算法是求圖最短路徑的另外一種演算法,其適用於求圖中任意兩節點之間最短路徑;
2)其基本思想也是動態規劃,時間複雜度是O(N^3),N代表節點個數;
3)動態規劃的實現步驟是:a)找出問題的最優子結構;b)根據最優子結構求出遞迴解;c)以自下而上的方式求出最優解