
相機姿態估計(四)--AP3P
AP3P
論文:An Efficient Algebraic Solution to the Perspective-Three-Point Problem
從數學的角度,提出了經典P3P演算法的更快,更魯棒,更準確的求解演算法。根據已知3對點,可以計算相機位姿和引數。
問題定義:
給定特徵fi i = 1, 2, 3在參考座標系中的位置,以及特徵點在相機座標系中的方向測量向量
,目標是估計相機的旋轉矩陣和位置
。其中C表示相機座標系,G表示 參考座標系。
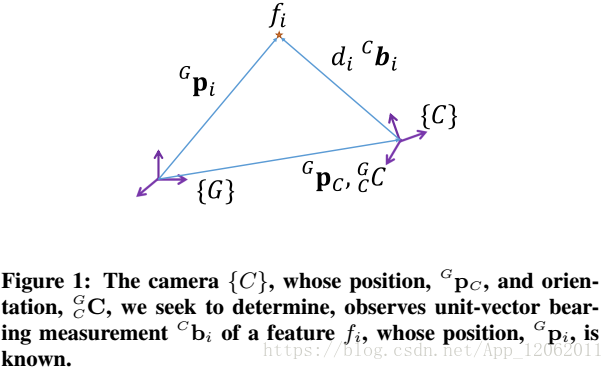
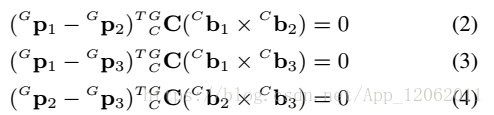
根據幾何關係,我們得出:

其中di表示參考座標系中相機到特徵點的歐式距離,兩兩相減,並投影到對應面的法向量:
為了計算旋轉矩陣中的角度,我們定義如下因子分解:

其中:

將式子5代替到公式2中,得到標量方程:(未知)
然後利用羅德里格斯變換:
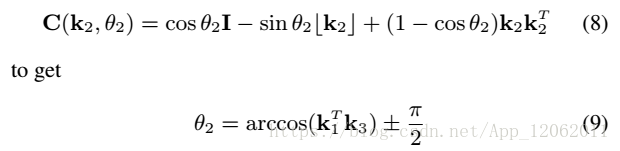
為了求其他兩個角度,定義如下因子分解:
利用旋轉矩陣特性:

化簡式10:
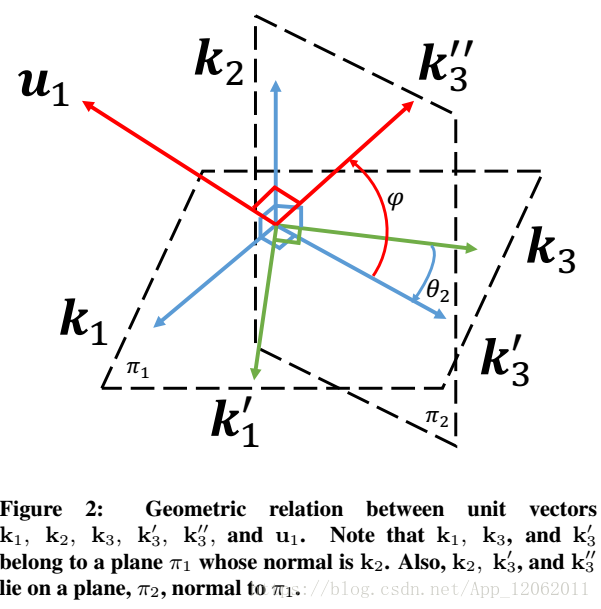
式13表述的幾何關係下圖所示:
接著,再次採用羅德里格斯變換得到:
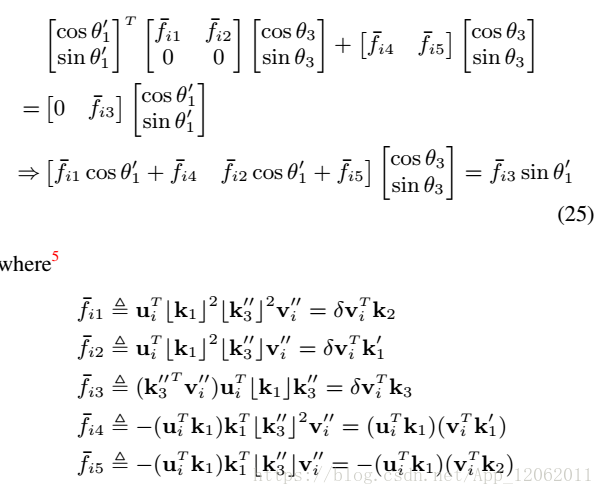
展開並重排上式:
其中:
出現3次,由此,我們重寫式12:
為了化簡等價於16式的18式,我們尋找一個,使得下式成立:
推出:
然後,根據19、8式得到:
接著,利用14式,展開18式,得到一個16式的等價結果:
在24式中,代替17式為0,並重排結果:
帶入具體的i = 1,2到式25,得到:

因為:

繼續化簡式26,同時 引入新引數:

然後用代替
:

根據28式,得到:
計算兩邊的歸一化結果:
得到一個關於的4階多項式.更加簡潔的表達如下:
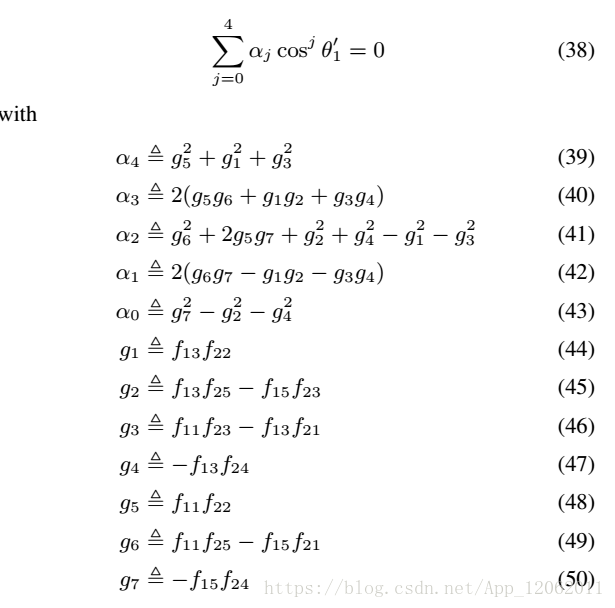
剩下的就是如何計算的問題了,作者採用,逼近的方式找到式38的近似解,一旦找到式38的4個解,便採用牛頓方法進行優化,以最小代價提高精度。
另外,要注意的是:
對於每個cos,可能會得到2個sin值,如下:

這會導致計算出2個旋轉矩陣, 因此,借用di>0,可以排除一個無效的。下一步,根據每對(cos ,sin
),計算(cos
,sin
),利用式37:

最後,根據19、27,5,我們找到相機位置,也可以利用5,12,18式,更快速得到:
我們定義如下旋轉矩陣:

因此:
將式54帶入53,得:
接著,計算相機位置:

這裡,為了速度,只計算了一個點i=3,如果更在意精度,可以用最小二乘擬合i=1,2,3點的結果。
最後,AP3P已經在OpenCV3中實現了。